
航空摄影测量中POS系统高精度定位技术
2013-12-06 08:34赖际舟于明清
测绘工程 2013年3期
万 辉,赖际舟,于明清,吕 品
(南京航空航天大学 自动化学院导航研究中心,江苏 南京 210016)
航空摄影测量通过在飞机上的航摄仪器对地面连续拍摄像片,同时结合地面控制点测量、调绘和立体测绘等方法,从而完成绘制地形图的作业,是我国获取基础地理信息数据的主要手段之一[1]。定位定向系统(Position and Orientation System,POS)作为航空摄影测量中机载基准传感器,主要由惯性测量单元(Inertial Measurement Unit,IMU)、卫星导航系统(Global Position System,GPS)和POS系统计算机(POS Computer System,PCS)组成,能够实时获取载体的位置、姿态、速度等导航信息,广泛应用于航空摄影测量中数字摄影相机测量和机载合成孔径雷达(SAR)运动补偿等领域,目前,POS系统辅助航空摄影测量技术已成为测绘学界的重点研究方向[2-3]。POS系统利用IMU和差分GPS(Differential GPS,DGPS)的数据信息,经过POS计算机导航解算,获取载体的位置、速度、姿态等信息,实现摄影成像的运动参数补偿,完成航空摄影测量要求。根据航空摄影测量对POS系统精度要求,GPS一般采用载波相位差分定位模式,定位误差精度在0.1m以内;IMU的水平姿态角测量误差应小于0.01°,航向角误差应小于0.02°。目前,通常用两种途径来提高POS系统精度:一种是硬件的改进,即采用高精度的惯性测量器件,但会使POS系统成本急剧增加;另一种是软件算法的改进,针对已有POS系统中较高精度器件的误差特性,对其进行数据融合及优化处理,该方法可以在不改变硬件结构方案的前提下,充分挖掘POS系统潜在精度,对POS系统在航空摄影测量中的工程应用具有较明显的意义。
本文针对POS系统高精度定位技术要求,设计了一种基于前向滤波和反向平滑的双向滤波方案用于数据融合。针对前向卡尔曼滤波数学模型的近似,降低了滤波状态估计的精确度,在此基础上进行反向平滑处理,能够获得更加精确的状态估计,提高了整体的定位精度。针对双向滤波算法进行了飞行试验数据验证,POS系统位置、速度运动参数优于前向卡尔曼滤波结果,表明了双向滤波算法的可行性,是一种有效POS系统高精度定位算法,具有重要的工程实用价值。
1 POS系统高精度定位技术方案设计
本文设计的POS系统高精度定位方案如图1所示,其方案算法分为两步:第1步在POS系统实时运行中,对IMU、DGPS数据信息进行卡尔曼滤波算法,即前向滤波[4],并实时存储滤波量测与状态信息;第2步在卡尔曼滤波完毕后,利用所有保存的量测值与滤波状态值再对POS系统进行最优固定区间平滑滤波的算法,即反向平滑,对运动参数进行开环误差校正,获得最优平滑运动参数[5]。
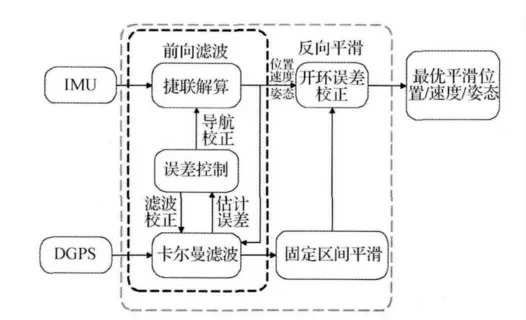
图1 POS系统高精度定位技术方案
2 POS系统高精度定位双向滤波算法研究
2.1 POS系统前向卡尔曼滤波器模型建立
POS系统通过卡尔曼滤波器对其内部IMU和DGPS数据进行滤波来实现定位定向。卡尔曼滤波中系统模型的准确性对滤波结果影响较大,本文针对POS系统内部系统和航空应用背景,对POS系统进行误差建模。
POS系统中采用的IMU精度要求较高,一般需要标定补偿,因此,本文对传统IMU误差模型进行简化处理,将其考虑为随机常值和白噪声。POS系统采用事后处理的算法,需要实时存储滤波量测与状态信息,卡尔曼滤波的实时能力与存储量及状态维数有关,对IMU误差模型的简化处理,降低了卡尔曼滤波的维数,便于滤波的实时运行和滤波状态信息的存储。
POS系统中卡尔曼滤波方程为

式中:X为十五维状态变量,包括九维惯性导航系统的基本导航参数误差,分别为平台误差角φE,φN,φU,东北天方向的速度误差δvE,δvN,δvU,纬度、经度、高度位置误差δL,δλ,δh,三维陀螺常值漂移误差εbx,εby,εbz和加速度计常值漂移误差▽x,▽y,▽z。过程噪声W=[wεxwεywεzw▽xw▽yw▽z]T包括陀螺与加速度计的随机误差,A(t)和G(t)分别为状态转移矩阵和噪声驱动矩阵,其具体形式为
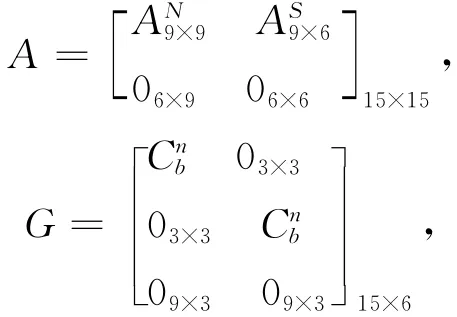
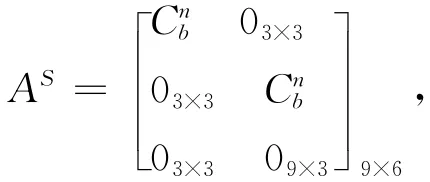
矩阵A中AN中元素可由文献[6]中惯性导航系统误差方程获得。
将惯性导航系统给出的位置、速度与GPS接收机给出的位置、速度信息的差值作为观测量,其量测方程如下:
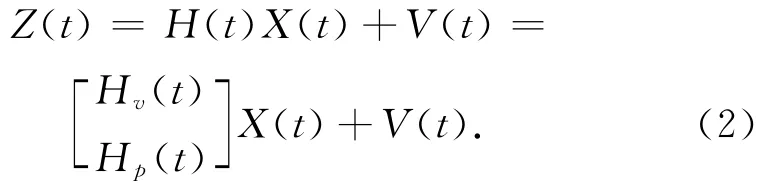
式 中:Hv=[03×3diag[1 1 1] 03×9],Hp=[03×6diag[RMRNcosL1]03×6],量测噪声矩阵V(t)=[σveσvnσvuσLσλσh]。
2.2 POS系统反向固定区间平滑滤波算法
前向卡尔曼滤波方法仅利用了滤波当前时刻和以前时刻的量测信息,由于POS系统可以进行事后分析,因此,如果对整个飞行摄影阶段的量测信息加以利用,可进一步提高系统精度。固定区间平滑算法(Rauch-Tung-Striebel,R-T-S)即为基于该思想的事后分析算法,首先在某个固定时间区间内先进行卡尔曼滤波,继而利用该时间区间内所有量测数据,反向得到每一时刻的状态估计,该算法已被证明是一种有效的事后滤波算法[7-8],适合POS系统事后处理。
固定区间平滑滤波算法的具体步骤如下:假设整个导航时间为N,t为此时间间隔内的任一时刻,则固定区间平滑估值表示为;在0时刻到N时刻的过程中,使用卡尔曼滤波器对各个时刻误差进行估计,并储存该估计;整个估计过程结束后,再采用固定区间平滑滤波,同时利用储存的估值来反向顺序 得到平滑估值。由于该方法对计算机的储存容量具有一定需求,并且平滑估计要在N时刻后延才可得到,因此,该方法只能用于事后处理。
对卡尔曼滤波方程式(1)进行离散化,得到离散化状态方程与量测方程如下:

首先,利用方程式(3)对系统进行前向滤波,同时储存状态估值、状态预测值,状态估计误差协方差阵、状态预测的误差协方差阵以及系统状态转移系数阵。
采用卡尔曼滤波最后时刻估值作为平滑初值,有

式中:和分别为误差平滑值和误差协方差平滑初始值。
反向固定区间平滑的递推公式如下:
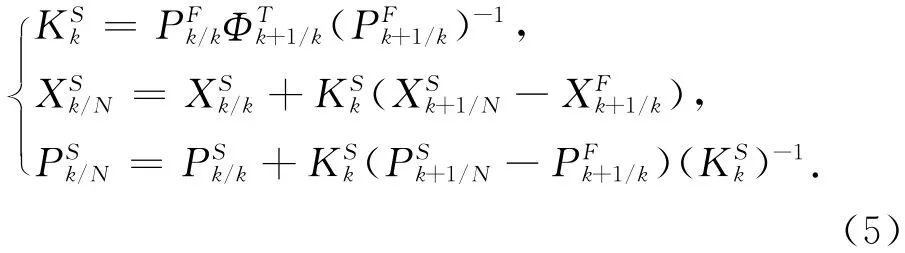
从式(5)可看出,固定区间平滑是k=N-1到k=0的倒推过程。平滑滤波递推过程中需要状态估计以及均方差预测及估计,因此,平滑滤波必须在卡尔曼滤波的基础上进行,该方法由前向卡尔曼滤波和反向固定区间平滑滤波完成,故称其为“双向滤波”,其流程如图2所示。
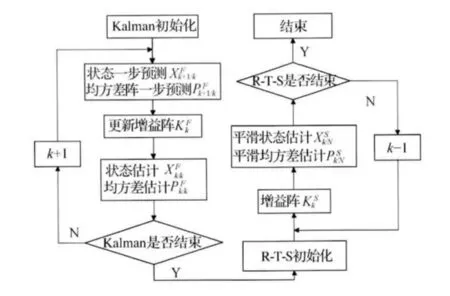
图2 双向滤波流程
3 POS系统双向滤波融合算法验证
为了验证双向滤波算法的应用效果,采用某型POS系统进行飞行试验,飞行过程中采集数据包括IMU数据文件、DGPS数据文件(基站与流动站数据,包含位置、速度信息)和GPS与IMU时间同步文件。按照正确的格式定义对文件中的数据信息进行提取,读取IMU和DGPS数据文件进行双向滤波算法。
试验中所用POS系统精度如下:陀螺零偏稳定性为0.1(°)/h,加速度计零偏稳定性为0.000 7g;GPS接收机为双频接收机,差分处理后速度、位置精度分别为0.1m/s,0.1m。惯性导航解算频率为50Hz,GPS输出为5Hz,卡尔曼滤波组合周期为0.2s。
按照双向滤波流程,分别进行高精度POS系统前向卡尔曼滤波和后向固定区间平滑滤波。由于在飞行数据中DGPS的精度较高,因此,在进行误差分析时以DGPS的速度与位置信息作为参考基准,分别将前向卡尔曼滤波与双向滤波融合结果与DGPS比较,得到前向滤波与双向滤波位置、速度误差对比如图3~8所示。
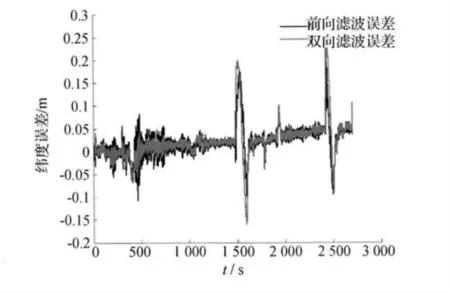
图3 纬度误差对比
从上述各误差对比曲线可以很明显地看出,双向滤波后整体的误差比前向卡尔曼滤波小,前向卡尔曼滤波与双向滤波误差均方差对比见表1。
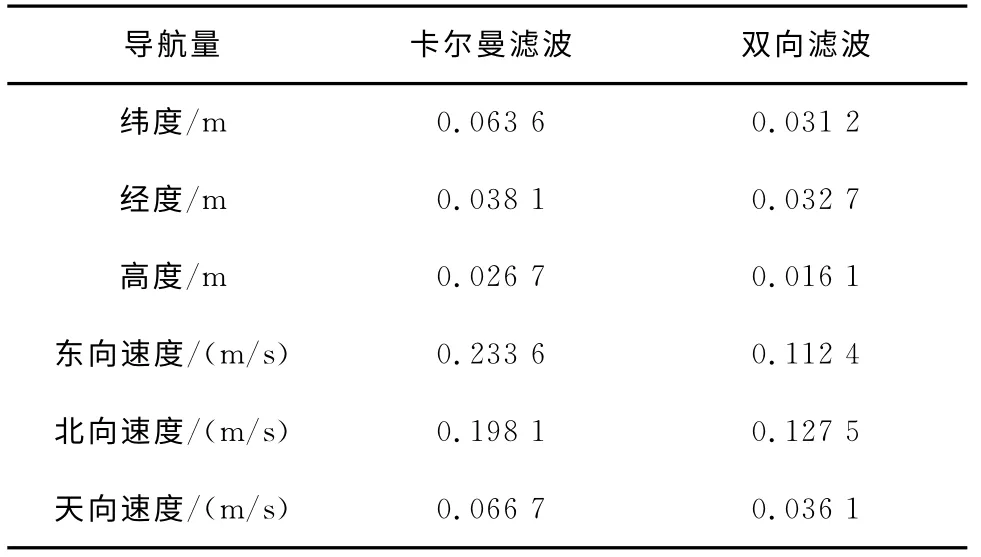
表1 卡尔曼滤波与双向滤波误差均方差对比
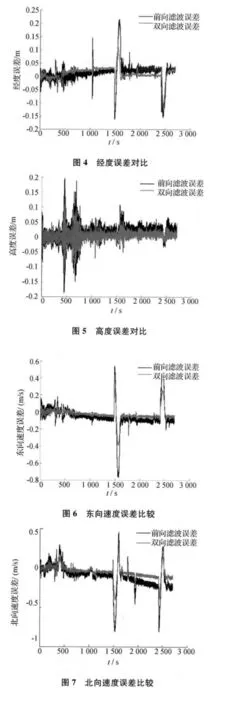
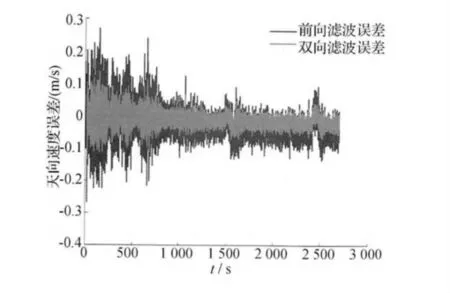
图8 天向速度误差比较
从表1对比中可看出,相比卡尔曼滤波,双向滤波的位置、速度信息的误差均方差都有所减小,水平位置误差在0.04m,高度误差为0.02m,水平 速 度 误 差 约0.1m/s,垂 直 速 度 误 差 在0.04m/s,表明双向滤波精度优于卡尔曼滤波。由于采用的飞行试验数据机动性较大,在局部可能出现双向滤波比前向滤波精度改善不明显,但是综合来看,双向滤波还是能比较全面地提高POS系统导航参数精度。
4 结束语
POS系统辅助航空摄影定位技术的优越性已经获得测绘领域的认同,但是如何使POS系统达到更好的定位精度仍是一个重要课题。POS系统中IMU与DGPS的滤波算法是保障其导航精度的重要环节,本文在传统卡尔曼滤波器的基础上,提出了基于前向卡尔曼滤波和反向固定区间平滑滤波的POS高精度定位算法,飞行数据处理验证表明,使用此算法可最终实现水平位置误差0.04m,高度误差0.02m,相对于传统卡尔曼滤波精度有所提高,对于POS系统的应用和精度提高具有重要的工程应用参考价值。
[1]李学友.IMU/DGPS辅助航空摄影测量原理、方法及实践[D].郑州:信息工程大学,2005.
[2]刘军,王冬红,张永生.基于GPS/INS姿态测量与定位的航空摄影测量精度分析[J].测绘工程,2004,13(4):43-47.
[3]孙红星,袁修孝,付建红.航空遥感中基于高阶INS误差模型的GPS/INS组合定位定向方法[J].测绘学报,2010,39(1):28-33.
[4]李睿佳,李荣冰,刘建业,等.卫星/惯性组合导航事后高精度融合算法研究[J].系统仿真学报,2010,22(Z1):75-78.
[5]F Landis Markley,Joseph E Sedlak.Kalman Filter for Spinning Spacecraft Attitude Estimation[J].Journal of Guidance Contorl and Dynamics(S0731-5090),2008,31(6):1750-1760.
[6]刘建业,曾庆化,赵伟,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010:336-337.
[7]宫晓琳,房建成.基于SVD的R-T-S最优平滑在机载SAR运动补偿POS系统中的应用[J].航空学报,2009,30(2):311-318.
[8]D H Hwang,S H Oh,et al.Design of a low-cost attitude determination GPS/INS integrated navigation system[J].GPS So-lutions(S1080-5370),2005,9(4):294-311.
猜你喜欢
航空知识(2019年1期)2019-01-11
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
中国房地产业(2016年9期)2016-03-01
电源技术(2016年9期)2016-02-27
