振捣机构对摊铺机熨平板力学性能的影响
2013-12-03 08:17:04吕聪正冯忠绪
山东交通学院学报 2013年3期
吕聪正,冯忠绪,李 耀,李 奇
(长安大学 道路施工技术与装备教育部重点实验室,陕西 西安 710064)
振捣机构是摊铺机熨平装置的重要组成部分,主要由偏心轴、偏心套、振捣梁和传动机构等构成[1]。振捣机构通过液压马达带动皮带轮驱动偏心轴转动时,前后振捣梁作上下往复运动和前后摆动的复合运动,因此,振捣机构在运动过程中将不可避免地产生惯性力[2]。不平衡惯性力通过振捣机构支撑作用于熨平板前沿,产生的振动对熨平板箱体造成不良影响,导致摊铺质量的下降。振捣机构动力学参数的选取直接影响其惯性力的大小,影响振捣机构惯性力的因素主要有振捣频率、冲击行程、振捣质量、振捣器各节的拼装方式以及相位关系等[3]。文献[4-7]建立了摊铺机熨平板压实机构单自由度的动力学模型,并对其振动特性进行了分析。
为了更加精确的表示熨平板工作时的振动情况,本文建立熨平板压实机构两自由度的动力学模型并重点讨论振捣机构的振捣频率、前后振捣梁振幅以及前后振捣梁相位差对熨平板作用力的影响,研究熨平板振捣机构的参数设计及选取。
1 振动性能的测试
在实际施工过程中,振捣机构最常用的模式是前振捣梁振幅为3 mm(冲击行程6 mm)、后振捣梁振幅为2.5 mm(冲击行程5 mm),振捣频率为0~25 Hz[8]。试验参照文献[9]检测标准,对国产某型摊铺机主熨平板振动性能进行测试。将摊铺机熨平板停放在橡胶轮胎上,在主熨平板上横向均匀布置5个加速度传感器,前振捣梁振幅取3 mm,后振捣梁振幅取2.5 mm,振捣频率取15 Hz,振动频率取40 Hz,前、后振捣梁相位差为180°,通过DEWE2010数据采集仪采集熨平板振动加速度信号采集,得到摊铺机主熨平板振动加速度波形图和加速度FFT(离散傅里叶变换)曲线如图1,2所示。
由图1,2可知,摊铺机熨平板振动主频率在39.1 Hz和16.1 Hz附近,且振动能量都较高。而这两个振动频率分别对应的是摊铺机熨平板的振动频率40 Hz和振捣频率15 Hz,说明摊铺机熨平板的振动不仅与熨平板的振动机构有关,而且振捣机构也对其有很大的影响。本文通过建立熨平压实机构模型,利用Matlab软件分析振捣机构不同参数的选取对熨平板作用力的影响,从而提出振捣机构参数设计及选取的建议,以减小对熨平板的作用力。

图1 摊铺机熨平板振动加速度波形图

图2 摊铺机熨平板振动加速度FFT曲线
2 建模及仿真分析
2.1 基本假设
1)振捣器和熨平板下混合料是具有一定刚度和阻尼的线性弹性体,前后振捣器下混合料刚度和阻尼是k1,c1和k2,c2,熨平板下混合料刚度和阻尼是k3,c3,振动器减振器刚度和阻尼是k4,c4,忽略随熨平板一起振动的接触区内混合料的质量。
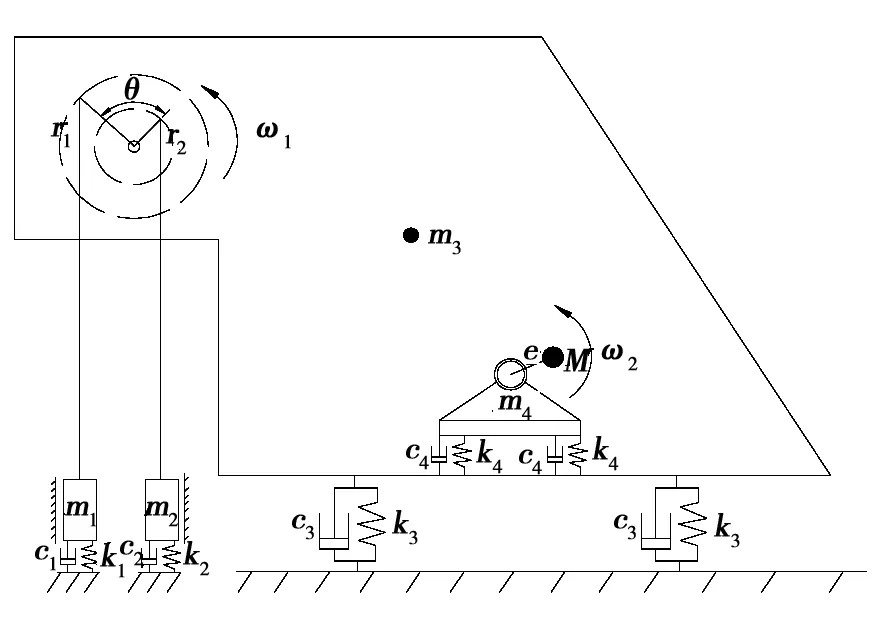
图3 熨平板压实机构的动力学模型

3)前后振捣器、振动器产生的圆周激励只以垂直分量作用在模型上,不考虑熨平板前后摆振的影响。
4)熨平板工作时始终与混合料保持接触。
2.2 动力学模型
根据以上假设,熨平压实机构的动力学模型如图 3所示。根据动力学理论,该振动模型建立的系统动力学微分方程为
(1)
式中 f1,f2为熨平板通过回转轴作用于前、后振捣梁上的力;M为振动器偏心块的质量;e为振动器偏心块的偏心距。
根据相对运动原理可知
(2)
将式(2)代入式(1),根据作用力和反作用力原理,可得振捣器对熨平板的作用力为
则系统的质量矩阵、阻尼矩阵、刚度矩阵和广义力矩阵分别为
2.3 仿真分析
采用Matlab对熨平压实机构进行仿真。模型是在某国产摊铺机熨平板的基础上建立的,相关参数参照该熨平板实际参数确定,动力学模型参数见表1。
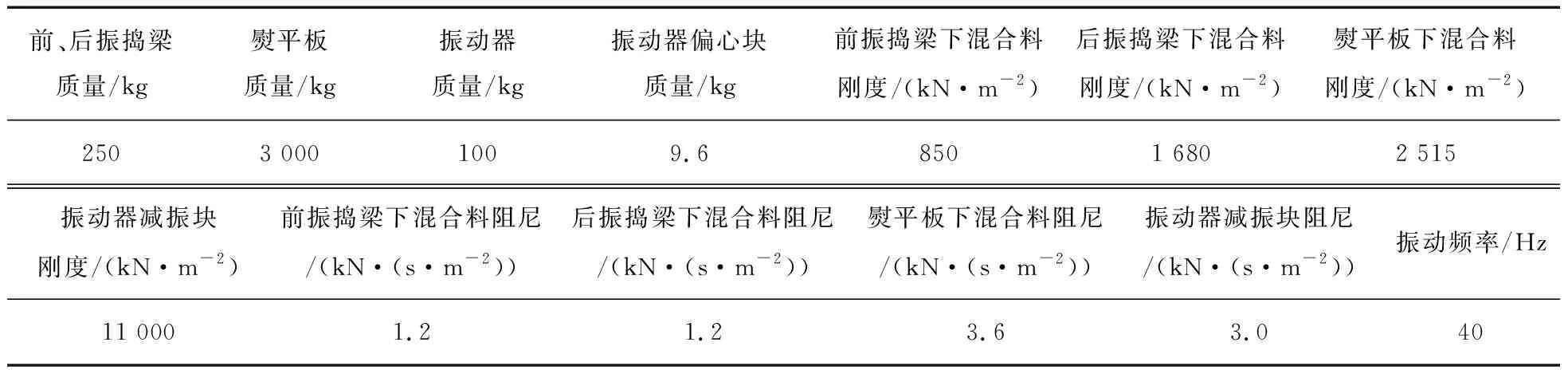
表1 动力学模型参数
根据动力学模型和模型参数,选取振捣频率为15 Hz,前、后振捣梁相位差为180°,前振捣梁偏心距为3 mm,后振捣梁偏心距为2.5 mm,采用Matlab进行仿真,并将仿真结果(见图4)与熨平板振动实测的数据进行对比可知,仿真结果和试验结果基本相同,误差在可接受范围内,说明该仿真模型适用于该系统的研究。
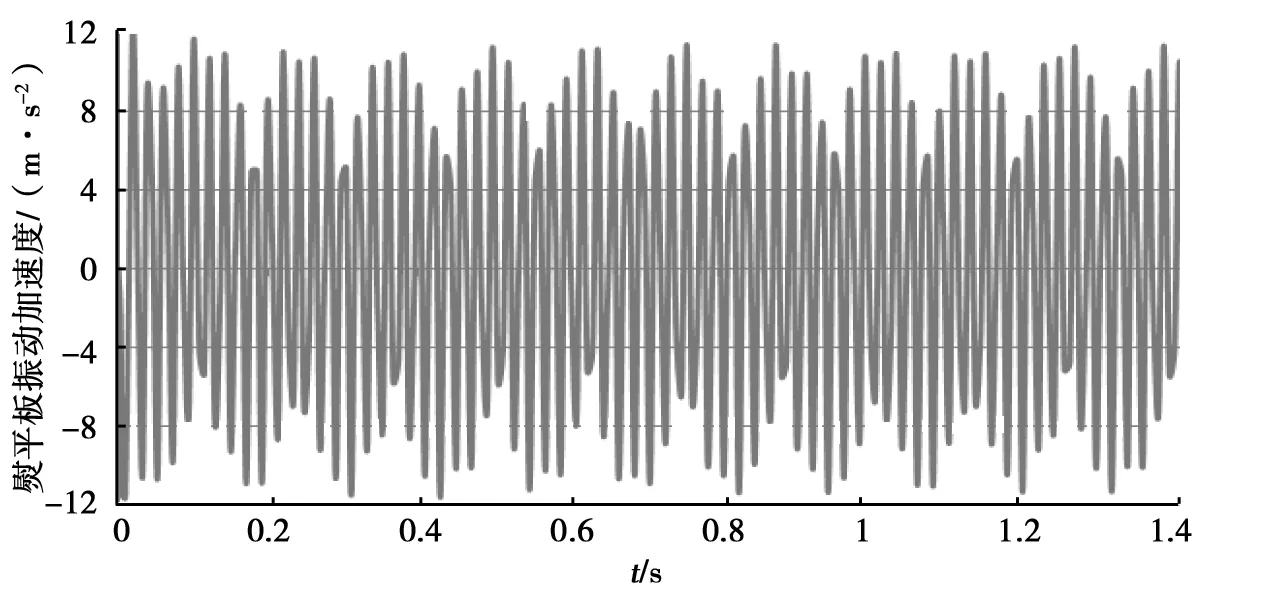
图4 熨平板振动加速度仿真结果
1)θ对F的影响
取振捣频率为25 Hz,振动频率为40 Hz,考察前、后振捣梁取不同的相位差时,振捣机构对熨平板作用力F(峰值为Fmax)的影响,仿真结果见表2。

表2 不同相位差时的Fmax
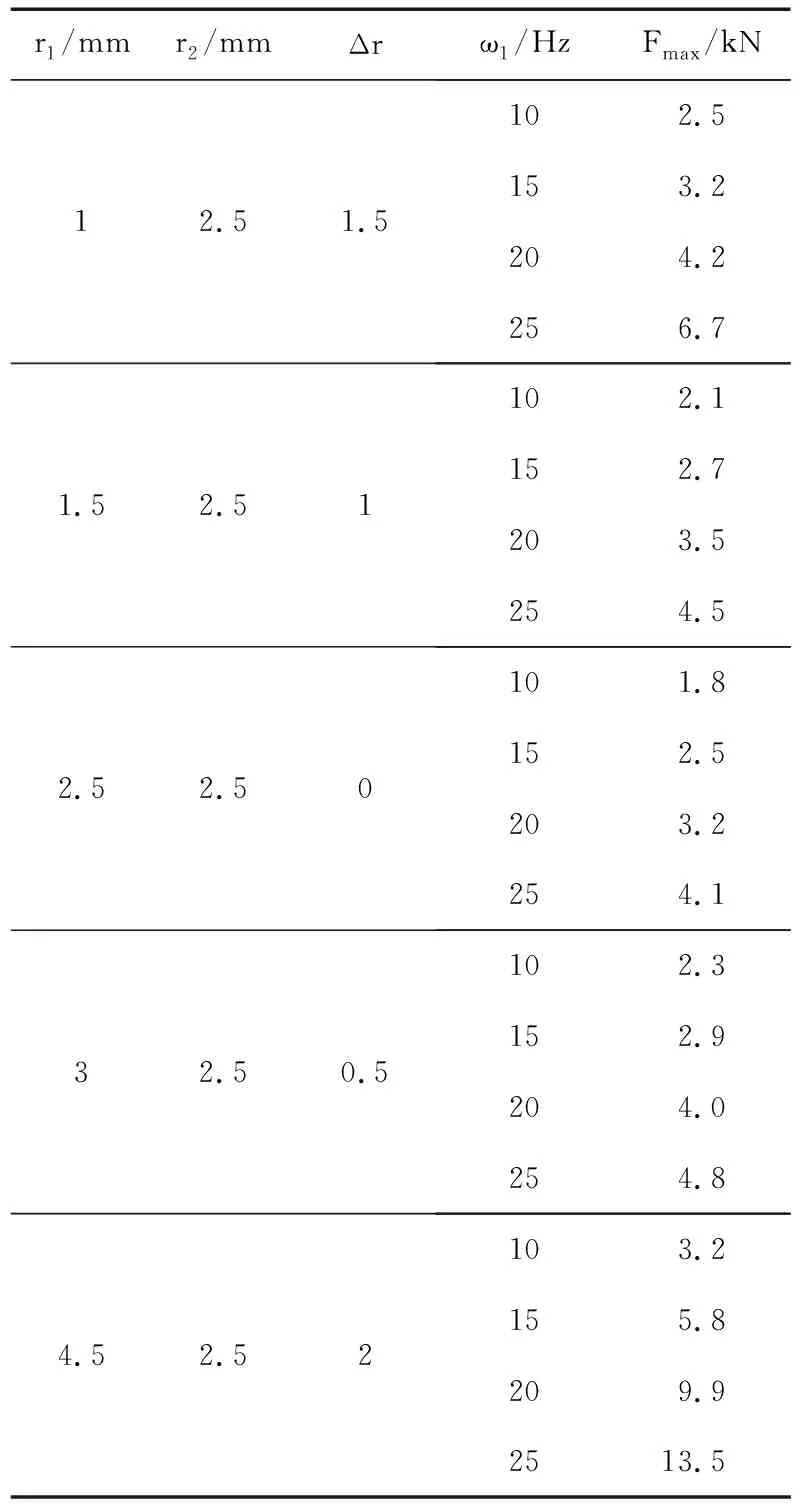
表3 不同前振捣梁振幅和振捣频率时的Fmax
2)振捣梁振幅和振捣频率对熨平板作用力的影响
目前,国内摊铺机熨平板双振捣机构大多数采用后振捣梁振幅固定不变,而前振捣梁振幅可调的形式。故保持后振捣梁振幅不变,考察选取不同的前振捣梁振幅以及不同的振捣频率时,振捣机构对熨平板作用力的影响,仿真结果见表3。
2.4 仿真结果分析
1)由表2可知,当θ选取不同的值时,Fmax将发生很大的变化。θ=180°时,Fmax最小;θ=0°时,Fmax最大,最大值与最小值相差可达到7倍左右。因此180°时可有效抑制振捣机构对熨平板的作用力。
2)由表3可知,在振捣频率相同的情况下,前后振捣梁振幅相等时,Fmax的峰值最小;当前后振捣梁振幅差值越大,Fmax的峰值也越大。在前后振捣梁振幅不变的情况下,Fmax的峰值随着振捣频率的增加而增大。
3 结语
1)前、后振捣梁相位差是影响振捣机构对熨平板作用力的主要因素,该相位差选取180°时,可有效抑制振捣机构对熨平板的作用力,从而提高摊铺质量。
2)在摊铺作业时,随着摊铺速度和摊铺厚度的增加,振捣频率随之增加,振捣机构对熨平板的作用力相应增大,导致摊铺机熨平板的不良振动,使摊铺质量下降。所以在满足摊铺作业质量的要求下,应尽量选用低频振捣。
3)为满足不同厚度的摊铺作业需求,目前国内双振捣机构大多采用前振捣梁振幅可调,后振捣梁振幅固定不变的形式,而这种结构形式导致前后振捣梁振幅不等,从而增大了振捣机构对熨平板的作用力。因此,在设计振捣机构时,应将前后振捣梁的振幅都设计成可调的,并在摊铺机施工过程中同时调节前后振捣梁的振幅,保证前后振捣梁振幅尽量相等,从而降低振捣机构对熨平板的作用力。
参考文献:
[1]王成, 赵利军, 李冬伟. 摊铺机双振捣机构的仿真分析与改进[J]. 山东交通学院学报, 2012, 20(2): 75-78.
[2]刘怀智.摊铺机双振捣机构的实验研究[D].西安:长安大学,2008.
[3]姚运仕, 刘怀智, 康敬东, 等. 相位关系对摊铺机振捣机构力学性能的影响[J]. 建筑机械,2007(17):69-72.
[4]严世榕, 闻邦椿, 宫照民, 等. 摊铺机压实机构的一种非线性动力学理论研究[J]. 中国公路学报, 2000, 13(3): 123-126.
[5]严世榕, 闻邦椿. 振捣器几个参数对摊铺机压实机构的非线性动力学特性影响分析[J]. 振动与冲击, 2000, 19(3): 26-29.
[6]刘刚, 田跃进, 肖翀宇. 摊铺机压实机构动态特性仿真[J]. 农业机械学报, 2005, 36(11): 34-37.
[7]汤炳新, 和晓军. 摊铺机振动梁结构动态特性设计研究[J]. 河海大学常州分校学报, 2000, 14(4): 6-11.
[8]王宪雪, 赵利军, 朱林波, 等. 基于 ADAMS 的摊铺机振捣机构动力学仿真研究[J]. 建筑机械, 2009 (9): 69-73.
[9]陕西建设机械有限责任公司,徐州工程机械科技有限公司.GB/T 1627792008 沥青混凝土摊铺机[S].北京:中国标准出版社,2008.
猜你喜欢
股市动态分析(2016年24期)2017-01-07 08:56:09
股市动态分析(2016年4期)2016-09-29 08:42:21
中学生数理化·高三版(2016年2期)2016-09-10 07:22:44
股市动态分析(2016年25期)2016-07-23 07:31:08
中国卫生(2014年5期)2014-11-10 02:11:32
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:06
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:22
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:19
筑路机械与施工机械化(2014年4期)2014-03-01 02:58:45
机械与电子(2014年2期)2014-02-28 02:07:43