基于时间序列方法的网络信号传输时延预测
2013-11-26 08:13:44郭诗朦张严心
铁路计算机应用 2013年7期
郭诗朦,张严心,朱 淑
(北京交通大学 电子信息工程学院,北京 100044)
随着铁路信息化的逐步完善,网络化的信号传输变得越来越普及,网络化控制系统(NCS)在铁路控制信号的发送和接收过程中起着重要作用,网络控制系统是通过网络形成的反馈控制系统,这种控制模式具有资源共享、连线少、易扩展、易维护,高效率、高可靠性及高灵活性等优点,是未来控制系统的发展模式。但是由于网络的介入和传输距离的扩大,资源竞争网络拥塞等现象不可避免地造成数据传输时延,从而导致系统性能变差,甚至影响系统稳定性[1]。所以,对时延的准确估计可以有效提高控制算法的准确性、实时性和鲁棒性。文献[2]采用AR模型对时延进行在线估计,从而减小计算量,提高算法的实时性。但使用AR模型是一种被动的“黑盒子”方法,仅依据原始数据对模型不断逼近,而忽略了系统的先验信息产生的数据。从控制工程观点来看,状态空间模型较AR模型有更多的结构优点,但因网络的复杂性,可用来建模的状态量很少[3]。权衡两种方法的利弊,本文提出一种基于状态空间的时间序列分析方法,对时延进行有效的预测。首先对时延序列建立合适的ARMA模型,然后转换为状态空间模型表述,从而使预测更加准确,并使控制算法更有效率,根据时延的确定控制算法改变传输的信号来补偿网路时延,可以较好地提高控制的实时性和控制效果。
1 时间序列预测的状态空间算法
状态空间模型求解算法的核心是Kalman滤波,Kalman滤波是在时刻t基于所有可得到的信息计算状态向量的最理想的递推过程。当扰动项和初始状态向量服从正态分布时,Kalman滤波能够通过预测误差分解计算似然函数,从而可以对模型中的所有未知参数进行估计,并且当新的观测值一旦得到,就可以利用Kalman滤波连续地修正状态向量的估计。
1.1 时间序列的状态空间表述
1.1.1 ARMA模型的建立
ARMA模型的一般形式为:

用Bk表示k步线性推移算子,即Bkyt=yt-k,BkUt=Ut-k, Bkc≡c,c为常数。并令bn:
则可简记为:

这一模型称作p阶自回归-q阶滑动平均混合模型,记为ARMA(p, q)模型。
1.1.2 转换为状态空间模型
考虑如下ARMA模型系统:
yt+a1yt-1+…+apyt-p=b0ut+b1ut-1+…+bqut-q
其中,Ut为稳定的白噪声。
令 ap+1=ap+2=…=am=0,bq+1=bq+2=…=bm=0
其中,m=max{p,q}。从而利用状态空间标准型的转换方法,得到此ARMA系统状态空间描述的可观标准型为:

yt=[1 0 0…0]xt+b0ut
可控标准型为:

yt=[b1_a1b0b2_a2b0…bm_amb0]xt+b0ut
其中,若令b1=b2=…=bm=0,可得到AR系统模型的状态空间表述,反之令a1=a2=…=am=0,可得到MA系统模型的状态空间表述。
1.2 Kalman滤波估计
状态空间建模中,初期的目标是在有噪声的环境下估计信号值,即状态量xt,要解决此类问题,Kalman滤波是一个简单有效的方法。Kalman滤波过程分为预测和更新两个阶段,这样的方法允许当一个新的观测数据到来时,对状态xt的估计值进行更新,以保证预测数据的时效性。
状态空间模型可写为:
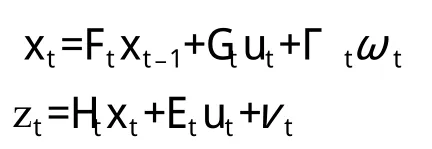
两式分别为系统的状态方程和观测方程,其中:Ft(nx×nx)为传递阵, Gt(nx×nu)为输入增益阵,Ht(nz×nx)为输出阵,Et(nz×nu)为输入-输出阵,Γt(nx×nω)为噪声增益阵,{vt}和{ωt}为均值为零的向量白噪声,它们相互正交并已知协方差,Σt=E[ωtωt'],Rt=[vtvt']。
考虑以上模型方程,状态x的最小均方差估计可以通过以下式子逐步算出:
预测:
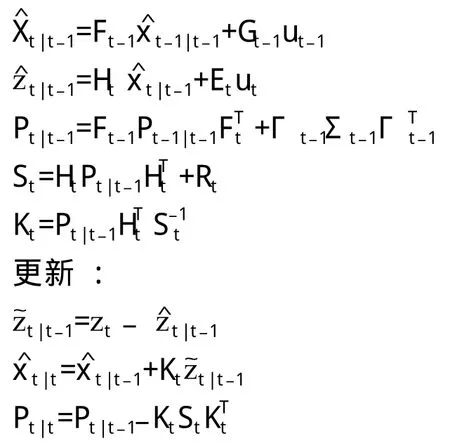
通过以上的递归算法,可以使当前的估计值始终基于全部过去时刻的测量值,并且不需要一个不断扩展的记忆空间,也从另一个方面减小了计算量。卡尔曼滤波方法的另外一个优点是当系统有一个潜在的模型时,可以很快收敛,并且可以跟踪随时间变化而变化的模型。
2 仿真实例
时延预估仿真如下:
在实验室环境下使用Matlab进行仿真,数据采取实验室到Google的RTT值,使用Pingtester软件进行测量,每分钟发送一次32 byte的数据包,并记录返回时间,得到该数据包传输的RTT值,截取其中的一段数据,每隔10个值采样一次,共取500组数据,以达到良好的时延变化趋势,用数据的前半部分进行建模,后半部分进行算法验证,使用Matlab对数据进行ARMA模型建模并建立状态空间模型,然后通过Kalman滤波方法给出预报值,用预报值与实际值对比,得到曲线如图1所示。
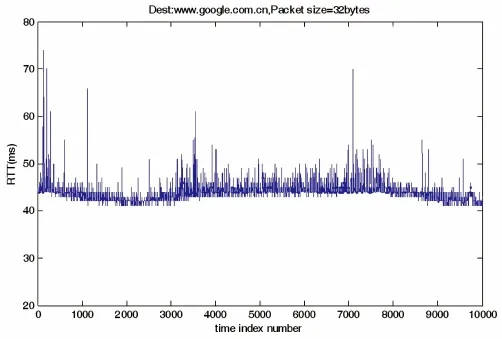
图1 测得时延值
图1 为通过软件测得的实际延时值,延时趋势呈现较为稳定的走向,在信号传输过程中会受到这些延时的影响,从图2可以看出,通过算法求得的预测曲线与实际的曲线趋势基本一致,表明该方法可以准确地对时延进行预测。

图2 时延预测轨迹
3 结束语
本文针对铁路信号的网络传输时延问题,提出了一种新型的延时预测方法,利用已测数据建立ARMA模型并转化为状态空间模型,通过Kalman滤波方法对未来的时延值进行估测,最后通过仿真验证了时延估测的准确性和实时性。该算法减小了控制过程的计算量,但对大量丢包的情况容易造成系统的不稳定,在今后值得进一步研究。
[1]岳 东,彭 晨,Qinglong Han.网络控制系统的分析与综合[M]. 北京:科学出版社,2007.
[2]时维国,邵 诚,孙正阳.基于AR模型时延预测的改进GPC网络控制算法[J].控制与决策,2012,27 ( 3).
[3]Ming Yang X. Rong Li. Predicting End-to-End Delay of the Internet Using Time Series Analysis[J]. Nov. 11, 2003.
[4]陈 虹,严法高,史旺旺. 网络控制系统中考虑动态延时的广义预测控制算法[J]. 信息与控制,2008, 37(2):224-227.
[5]王 伟. 广义预测控制理论及其应用[M]. 北京:科学出版社,1998:28-34.
[6]梁晓明,刘福才,王 娟. 基于状态空间模型的广义预测控制快速算法[J].计算机仿真, 2009, 26(4).
[7]Rudy Negenborn. Robot Localization and Kalman Filters On finding your position in a noisy world[M]. 2003.
[8]邓自立.卡尔曼滤波与维纳滤波—现代时间序列分析方法[M].哈尔滨:哈尔滨工业大学出版社,2001.
[9]X. Rong Li, Yunmin Zhu, Jie Wang, and Chongzhao Han.Optimal Linear Estimation Fusion—Part I: Unified Fusion Rules[J]. IEEE TRANSACTIONS ON INFORMATION THEORY,2003,49(9).
[10]KunjieLi, G.P.Liu. A Simplified GPC Algorithm of Networked Control Systems[J]. Proceedings of the 2007 IEEE International Conference on Networking, Sensing and Control,London, UK, 2007.4.
[11]Wenshan Hu, G.P.Liu, David Rees. Networked Predictive Control Over the Internet Using Round-Trip Delay Measurement[J]. IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, 2008, 57(10).
[12]Wenshan Hu, G. P. Liu, David Rees. Design and Implementation of Networked Predictive Control Systems Based on Round Trip Time Delay Measurement[J]. Proceedings of the 2006 American Control Conference Minneapolis, Minnesota,USA, June 14-16, 2006.
[13]王天堃,周黎辉, 韩 璞,徐大平. 网络化控制系统传输时延与丢包补偿[C]. Proceedings of the 26th Chinese Control Conference , Zhangjiajie, Hunan, China. 2007.
[14]韩路跃,杜行检. 基于MATLAB的时间序列建模与预测[J]. 计算机仿真,2005(4).
[15]X. R. Li. Applied Estimation and Filtering[D]. University of New Orleans, New Orleans, LA, 2002.
猜你喜欢
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:10
制造技术与机床(2017年6期)2018-01-19 02:41:07
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年17期)2016-04-11 12:38:28
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
电源技术(2015年9期)2015-06-05 09:36:06
遥测遥控(2015年2期)2015-04-23 08:15:18
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
电子设计工程(2014年20期)2014-02-27 12:01:00