
机车运行状态远程监控系统的研究
2013-11-26 07:10崔明朗钱雪军
铁路计算机应用 2013年8期
崔明朗,钱雪军
(同济大学 电气工程系,上海 200331)
机车运行安全是当今铁路发展的重中之重,本文针对机车运行的特点,提出了一种机车运行状态监控系统的解决方案,以实现机车运行过程中实时状态信息的远程监控。主要研究内容包括:机车在三维虚拟场景内的模拟运行、机车视频监控,机车工况信息展示。
1 系统总体功能
1.1 系统模块组成
机车运行状态远程监控系统(简称系统)的主要功能是将各类传感器采集到的机车定位数据、视频数据(包括机车前方视景视频以及车内视频监控数据)、机车工况信息数据,通过3G无线网络传输到地面监控展示中心,实现所有数据的综合展示。整个监控系统主要由机车车载终端、网络通信设备和监控展示中心3大模块组成,如图1所示。
机车车载终端是整个监控系统的基础,主要实现数据的采集和预处理功能。采集数据包括机车视频监控数据、GPS定位数据、机车工况数据。数据处理是将各类采集数据转变成能在网络上传输的数据包格式。
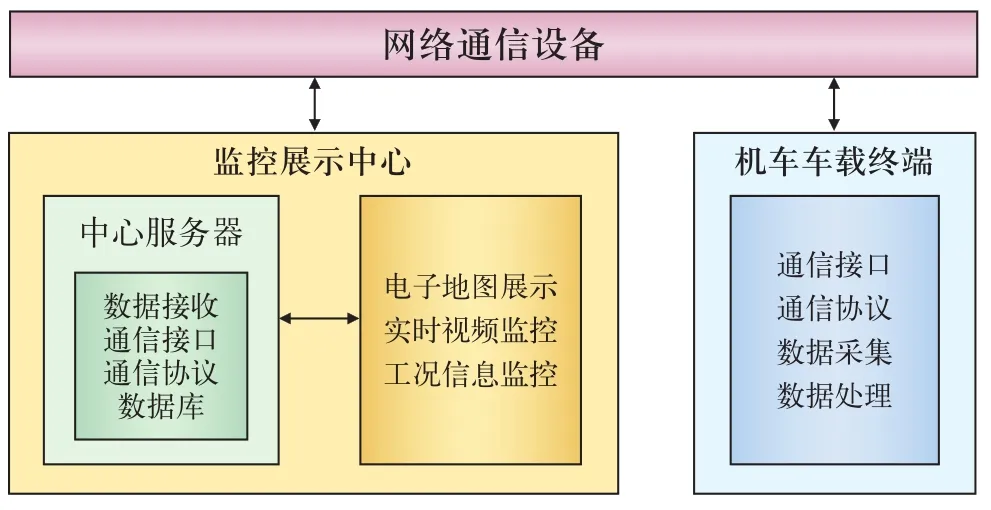
图1 系统结构
网络通信设备是系统信息传输的载体,也是系统实时性和可靠性的重要保障。考虑到机车运行过程中运行区间较大,运行速度较快等特点,系统采用3G无线网络作为系统的通信设备,其主要功能是将实时数据信息传输到地面监控展示中心。
监控展示中心主要由中心服务器和展示2大部分组成。中心服务器实现对数据包的接收、解包、还原、校正等操作,展示模块主要实现监控视频和机车工况信息的展示,同时根据机车的定位数据实现机车在三维虚拟场景内的模拟运行。监控展示中心的软件组成主要包括机车运行跟踪定位软件、视频监控展示软件、机车三维虚拟场景软件、机车工况展示软件4部分。
1.2 系统层次架构
系统的层次架构主要由数据信息采集层、数据信息传输层、数据信息处理层和机车运行状态展示层4个层次组成,如图2所示。
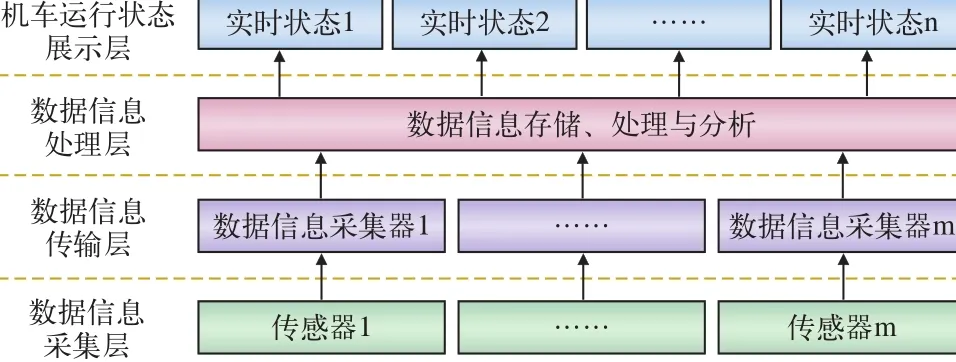
图2 系统层次架构
数据信息采集层主要由安装在机车上的各类传感器组成,该层能对机车运行时的视频数据、途经地理位置经纬度坐标数据、工况信息(如行驶速度和时间)等相关信息进行采集。将采集到的数据传入到机车车载终端,通过数据信息传输层传到数据信息处理层,数据信息处理层对接收到的数据进行分析处理后,启动机车运行状态展示层的机车运行跟踪定位软件、视频播放展示软件、机车三维虚拟场景软件以及工况信息展示软件,在监控展示中心实时展示当前机车运行的各种状态信息以及监控视频。达到对机车的运行状态进行实时跟踪定位、展示、观察的目的。
2 机车车载终端的设计
车载机车车载终端装置主要包括车载主控单元、各类数据采集模块、数据处理模块、GPS定位模块、通信终端设备等。
2.1 机车车载终端的硬件结构
机车车载终端从硬件结构上可以分为5个部分,分别为采集机车工况信息的LKJ2000,采集机车视频信息的USB摄像头,采集机车定位信息的IT500GPS,连接网络的3G通信模块以及系统的数据处理和控制核心eKINO-945GSE工业主板,其硬件框图如图3所示。
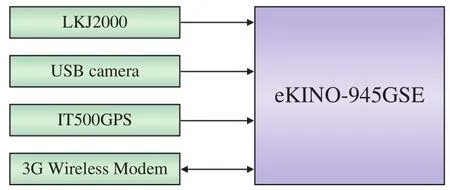
图3 车载终端硬件结构框图
终端的数据处理和控制核心采用eKINO-945GSE工业主板,CPU为Intel® Atom™ N270 1.6 GHz ,支持超低电压无风扇,功耗较小。主板工作时能接受宽范围9 V ~28 V 的直流输入,非常适合机车上工作时电压不稳定的情况。该主板具有非常丰富的外设接口,扩展较为方便。该设备主要负责控制各个采集设备,并对采集数据进行预处理和网络打包。
定位信息的采集选用 Fastrax IT500GPS 接收模块,该模块在非常苛刻的应用中也能实现高性能的导航,在较恶劣的 GPS 卫星可见度环境下也能稳定定位。 冷启动灵敏度(-148 dBm)使得它在其他模块不能定位的环境中也能捕获卫星并开始导航。该设备主要用来采集机车途经地理位置经纬度坐标数据。
USB摄像头采用CMOS传感器的奥尼AONI,其硬件像素为30万,软件像素为200万,默认视像解像度为640×480。它采用的是标准USB2.0接口,图像传输速率高达30帧/s,高清全玻璃镀膜镜头,通光率提高100%。 该设备主要用来采集机车的视频信息。
国内以LKJ2000型为主体的机车运行监控记录装置已基本上在全路各种类型的内燃机车、电力机车上安装使用。终端采用LKJ2000机车的监控数据作为系统工况信息的来源。
网络设备采用的是E220联通3G上网卡,E220是一个即插即用的便携式上网卡,产品尺寸较小,可以使终端接入3G无线网络。
2.2 机车车载终端的软件组成
机车车载终端是一个嵌入式系统,嵌入式系统的优劣在于嵌入式操作系统的选取。嵌入式操作系统(Embedded Operating System,EOS)是指用于嵌入式系统的操作系统。它是一种用途广泛的系统软件,通常包括与硬件相关的底层驱动软件、系统内核、设备驱动接口、通信协议、图形界面、标准化浏览器等。嵌入式操作系统负责嵌入式系统的全部软、硬件资源的分配、任务调度,控制、协调并发活动。它必须体现其所在系统的特征,能够通过装卸某些模块来达到系统所要求的功能。目前在嵌入式领域广泛使用的操作系统有:嵌入式Linux、Windows Embedded、VxWorks等,以及应用在智能手机和平板电脑的Android、iOS等。
本系统的软件是基于Windows XP Embedded(XPE)操作系统设计的,系统整体的软件结构如图4 所示。在XPE操作系统中,系统软件主要分为驱动程序和应用程序2个部分。其中驱动程序部分包括网卡驱动,显卡驱动,主板驱动和其他接口驱动等;应用程序部分包括各类数据采集程序,数据处理程序,数据传输程序和系统通信程序。
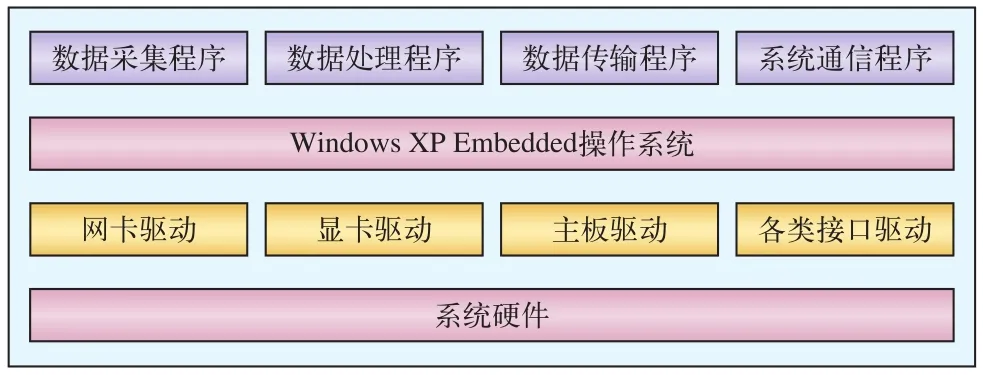
图4 机车车载终端总体软件结构图
3 通信接口设计
监控展示中心和机车车载终端建立的是面向连接的Socket通信。在这一过程中,机车车载终端将采集到的机车实时状态信息传输给监控展示中心,监控展示中心对数据进行接收、解析、校正、处理等一系列的操作。通信协议采用的是面向连接的数据流TCP协议,收发双方按照协议所规定的数据包结构进行统一的封装和解析。
根据连接启动的方式以及本地Socket要连接的目标,Socket之间的连接过程可以分为3个步骤:监控展示中心监听,机车车载终端请求,连接确认。在连接成功时,应用程序2端都会产生一个Socket实例,操作这个实例,完成所需的会话。系统的监控展示中心端为服务器端,机车车载终端为客户端。
机车车载终端和监控展示中心进行Socket通信的过程如下:监控展示中心监听,机车车载终端请求,连接确认。
监控展示中心监听:是监控展示中心端Socket并不定位具体的机车车载终端Socket,而是处于等待连接的状态,实时监控网络状态。
机车车载终端请求:是指由机车车载终端的Socket提出连接请求,要连接的目标是监控展示中心端的Socket。为此,机车车载终端的Socket必须首先描述它要连接的监控展示中心的Socket,指出监控展示中心端Socket的地址和端口号,然后向监控展示中心端Socket提出连接请求。
连接确认:是指当监控展示中心端Socket监听到或者说接收到机车车载终端Socket的连接请求,它就响应机车车载终端Socket的请求,建立一个新的线程,把监控展示中心端Socket的描述发给机车车载终端,一旦机车车载终端确认了此描述,连接就建立好了。而监控展示中心端Socket继续处于监听状态,继续接收其他机车车载终端Socket的连接请求。在通信过程中,地面监控展示中心可以随时向机车车载终端发送停止数据传输的请求,机车车载终端作出相应处理并释放资源。其工作流程如图5所示。
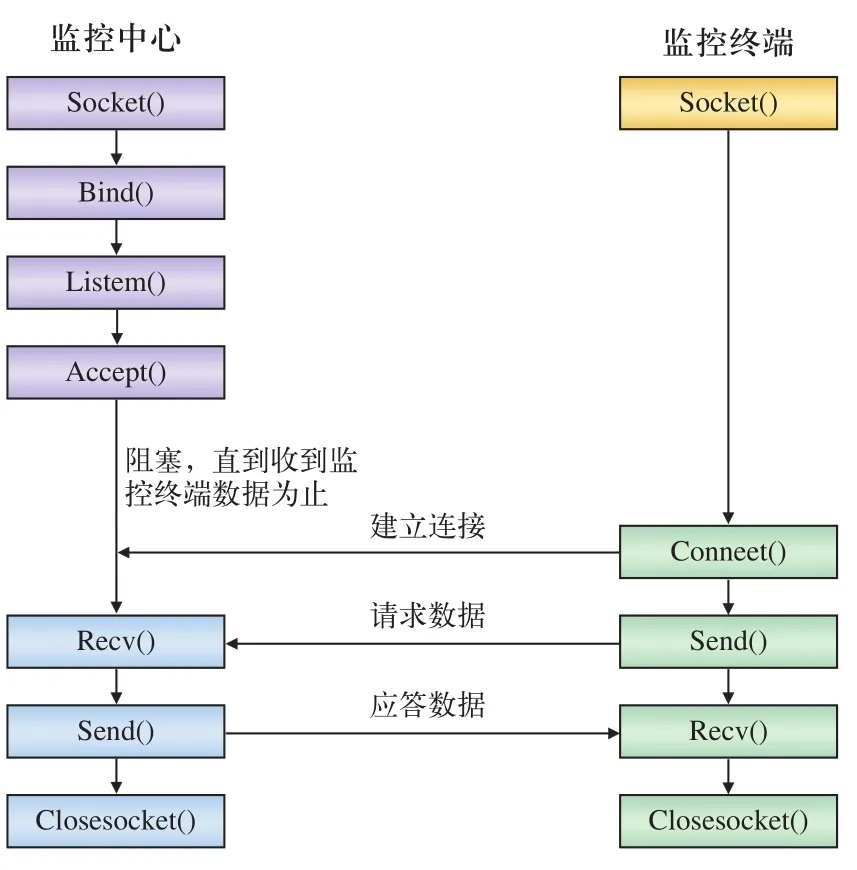
图5 面向连接的Socket操作流程
4 监控展示中心软件组成
4.1 机车运行跟踪定位软件
机车运行跟踪定位软件在和机车车载终端建立通信连接后,对机车车载终端传输的实时状态数据信息进行分析处理,以实现机车实时定位信息在三维电子地图上可视化呈现,并将数据信息发送给视频监控软件以启动视频播放展示。该部分软件是在Microsoft Visual C++2005环境下,使用OpenSceneGraph驱动Creator创建的三维机车模型在三维虚拟场景的实时模拟运行。
4.2 视频播放软件
视频播放软件与机车运行跟踪定位软件通信连接后,根据接收到的数据信息,实现视频文件的自动播放及其他辅助展示功能等。其中,视频文件由安装在机车上的数字摄像机获得。该部分软件在Microsoft Visual C++2005环境下,基于多媒体数据处理平台DirectShow,采用面向对象编程方式开发。
4.3 机车三维虚拟场景软件
机车三维虚拟场景软件主要实现三维虚拟场景(包括机车、轨道、城市、铁路沿线的平原和山脉等)的绘制和展示以及简单的三维分析功能等。使用Creator建模软件并利用Visual C++2005和OpenSceneGraph API实现课题中需要的虚拟场景。
4.4 机车工况信息展示软件
机车工况信息展示软件主要实现机车工况信息的实时呈现。该部分软件在Microsoft Visual C++2005环境下,应用对话框技术进行开发。
5 结束语
本文提出并设计了一种基于嵌入式和网络技术的机车运行状态远程监控系统。该系统以高速发展的嵌入式技术为核心,结合网路通信技术和流媒体技术,为当今的机车状态监控系统提供了一种解决方案。
[1]吴正平.机车状态远程监控系统的研究与设计[D]. 长沙:中南大学,2005.
[2]赵 炯.高速机车监控展示平台的电子地图与视景播放技术研究[D]. 城都:西南交通大学,2012.
[3]闻恩友,赵正德,杨立朝,等. 3G网路的移动视频监控系统[J]. 中国图形图像学报, 2008,13(10):1987-1990.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
北京支部生活(2022年5期)2022-05-24
哈尔滨铁道科技(2020年3期)2021-01-18
房地产导刊(2020年7期)2020-08-24
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
铁道通信信号(2019年2期)2019-03-26
中国铸造装备与技术(2017年3期)2017-06-21
现代装饰(2017年10期)2017-05-26
中国公共安全(2017年11期)2017-02-06
