
数据交换技术在船舶电站监控系统中的应用研究*
2013-11-23 07:53
舰船电子工程 2013年5期
(武汉船舶职业技术学院 武汉 430050)
1 引言
随着船舶电气技术的发展,现代大型船舶的电网规模及容量日益增大,电网的安全性与可靠性已成为影响船舶生命力的重要因素。电站是船舶电网的核心[1]。电站监控系统用于对整个船舶电网实施监视、控制和管理[2],是确保电网供电连续性、可靠性及经济性的重要保障,同时还能够保证电网的电能质量[3~5]。由于船舶电网的规模越来越大,电站监控系统的监控变量也日益增加,如何保证监控的实时性和可靠性,是船舶电站监控系统设计面临的重要问题[6]。模块化设计技术能够提升监控系统的可靠性及扩展性,是当今工业监控系统设计的主流思路。大型船舶电站监控系统也往往采用模块化设计,其功能模块数量多,为保证监控的实时性,因此需要重点考虑各功能模块之间的实时同步数据交换以及通信能力等问题。本文介绍了一种实时数据同步交换技术在船舶电站监控系统中的应用方案,既实现了模块化设计,使其具备较高的可靠性及良好的可扩展性,又能保证电网参数监控的实时性,为大型船舶电站监控系统的设计提供了可行的技术途径。
2 通信网络架构
本文所述的船舶电站监控系统采用分层分布式通信网络架构和模块化设计思想,其通信网络架构如图1所示。监控系统中的各功能模块均有独立的CPU,每个模块都可视为一个相对独立的嵌入式系统,现场数据采集、数据处理、数据交换、控制输出以及通信等任务均由各监控功能模块直接完成。上位机只作为显示和操作终端,对最终的监测数据进行实时显示和记录分析。各监控功能模块的CPU 主要为高速DSP芯片,具有很强的实时数据处理能力和高速响应性能。其中的监测功能模块以同步并行的方式进行工作,确保数据监测的实时性。由于主要的监控功能由相对独立的嵌入式模块相互协作共同完成,因此即使某个或少数几个监控功能模块发生故障也不会导致整个监控系统崩溃,从而大大提高了监控系统的可靠性和生命力。
如图1所示,通信控制模块和各录波子模块构成一级辐射型网络;总线控制模块、通信控制模块以及各现场监控模块构成二级网络。二级网络经通信控制模块接入一级网络,因此,二级网络相当于一级网络某节点下的一个子网。一级网络主要完成定时录波功能,二级网络主要完成实时监控功能,一级网络之间的通信与二级网络相对独立。

图1 船舶电站综合监控平台的网络架构
一级通信网络由RS-422总线组成,通信介质为屏蔽双绞线。RS-422总线抗干扰能力强,传输距离远,传输速率高,并可以实现一点对多点通信,因而一级网络可以方便地进行扩展。上位机通过RS232/RS422模块接入一级网络,作为一级网络的主站节点。
二级通信网络由ISA 总线组成,ISA 总线的数据宽度为16bit,工作频率为8MHz[7],并已成为标准的计算机主板接口,因此二级网络中的所有模块都可设计成具有ISA 接口的插件板,并通过工控机主板的ISA 插槽集成安装。所以,二级网络可以采用多台工控机箱的方式实现硬件集成,特别适合监控数据量大的应用场合。需要说明的是,二级网络的通信控制模块配置了RS422接口,通过双绞线与一级网络相连。通信控制模块的地位类似网关,是一级网络与二级网络沟通的桥梁。
3 数据交换工作流程
船舶电站监控系统的主要任务包括:船舶电网主要节点的电压、电流、相角测量以及功率计算,各配电板断路器的开关状态监测与控制,发电机组的转速和输出电压电流功率测量及调节控制,大功率电源装置的输出电压电流功率测量及调节控制,用电设备功率、运行状态测量及相关控制等,以及部分电气参数的定时波形记录。上述监控任务主要分成两类:一是周期性的任务,包括电气参数采样、实时功率计算、各监控模块之间数据交换以及上位机显示数据刷新等;二是非周期性任务,主要有开关量输出控制和定时录波等。
如前文所述,监控系统的每个功能模块均具有独立的CPU,主要是高速DSP 芯片TMS320F206,具有很强的实时数据处理能力,所以从模拟信号采样到数字结果生成能在很短的时间内(10-6s数量级)完成[8],因此系统的整体速度就取决于它的数据交换和通信能力。由于需要监测的电气参数多,数据采集量大,数据交换频繁,为了保证监控的实时性,船舶电站监控系统应用了文献[9]介绍的实时数据同步交换技术,给每个嵌入式模块配置双口RAM 作为共享的数据缓冲区,具体实现如下。
3.1 周期性数据监测任务
在二级网络各监控功能模块上设计了地址逻辑控制电路,赋予每个监控功能模块唯一的硬件地址。该地址逻辑控制电路为一通用电路,可以通过改变跳线方式来改变模块的硬件地址。二级网络各监控功能模块均配置双口RAM 作为其内存,实时数据采集和数据处理结果均存入双口RAM 相应的数据区内。所以,对监控功能模块的寻址实际上是对模块内存的寻址,即可将各监控功能模块看成映射到ISA 总线上的内存块,内存块的地址由模块的硬件地址和双口RAM 内的数据逻辑地址共同决定,显然各个内存块的地址是不连续的。总线控制模块负责ISA 总线上所有的数据交换任务,具有唯一的和绝对的ISA 总线控制权。在总线控制模块看来,ISA 总线上的所有模块构成了地址不连续的内存单元。ISA 总线上的同步控制模块则发出同步工作脉冲,在同步工作脉冲的触发下,由总线控制模块对ISA 总线上的所有内存单元进行寻址和读写操作,从而完成数据同步交换任务。
周期性数据监测工作流程如下:
监控系统启动后,同步控制模块开始采集电网频率并发出同步脉冲(周期为10ms),作为二级网络各模块的触发信号。模拟量输入模块、功率计算模块和开关量输入模块在接收到同步脉冲后,开始采集的电压、电流、相角、柴油机转速及断路器开关状态量等,由功率计算模块完成平均功率计算。采集和计算完成后,各监测模块把得到的结果写入各自的双口RAM 中,并设置握手标志字节,然后等待下一个触发信号的到来。
接收到触发信号后,总线控制模块首先依次寻址ISA总线上各监控模块的双口RAM,读取新的数据块,并编号存入自己的双口RAM;然后寻址通信控制模块,将新的数据块依次写入通信控制模块的双口RAM;接着读取通信控制模块的命令接收缓存区,如有控制命令报文,则按命令要求寻址二级网络上相应的监控模块转发命令报文。这样,总线控制模块每隔10ms刷新一次通信控制模块的监测数据接收缓存区,确保上位机随时能读取到最新的实时采样数据。需要说明的是,总线控制模块对读取的数据块基本不做处理,仅是将其进行转移;而且,总线控制模块在读取数据块后必须擦除相应的握手标志字节,以保证不会把旧的数据块误认为新的数据块。当二级网络的监控模块增加,需要增加新的工控机箱时,可以采用文献[10]提出的内存映射方法实现对新工控机箱内各模块的寻址。
上位机周期性地向通信控制模块发送查询命令,通信控制模块接收到查询命令后将其双口RAM 监测数据缓存区的数据块上传给上位机,在上位机主界面上显示。上位机界面的数据刷新间隔为300ms。
除了完成电网状态量实时监测之外,船舶电站监控系统的另一个重要功能为定时录波,可完成电网频率、电压、电流、相角、有功功率、无功功率、柴油机转速以及主要负载运行参数等的波形记录。这一功能由一级网络的录波模块完成,记录波形时间为20s,采样频率为2kHz。每个录波模块可同时完成8路电气参数的波形记录,为实时存储大量的录波数据,录波模块采用大容量的高速读写CF 卡作为外部存储器,实现录波数据的实时存储。录波完成后,由上位机向各录波模块发送录波查询命令,依次读取波形数据,绘制波形曲线。录波的起动方式可设置为自动或者手动,记录的波形将为船舶电网的动态分析提供重要的数据依据。
3.2 非周期性控制输出任务
船舶电站监控系统的控制功能由二级网络的开关量输出模块完成。上位机通过一级网络向通信控制模块发出开关控制命令报文,总线控制模块从通信控制模块获取该命令后,寻址二级网络上的开关量输出模块,并将命令写入该插件的双口RAM 的命令缓存区,开关量输出模块读取命令,按要求输出开关控制信号,驱动相应的执行机构(主要是断路器)动作。在上位机下达控制命令报文之前,先启动录波,然后发出控制命令,录波模块可实时记录断路器动作前后电网各参数的变化过程,最后由上位机读取录波数据、绘制波形曲线,对电网的动态过程进行分析。
4 实时通信设计
船舶电站监控系统的一级网络采用主从式多机通信,上位机为主机,一级网络各模块为从机。通信方式为问答式,主机向所有从机发送命令报文,各从机收到命令后进行命令校验,如果是发给自己的命令则向主机回送响应报文,如果不是则不作响应。各从机的独立CPU 均为TI的TMS320F206芯片,它自带全双工异步串口,可以应用于多处理器系统中的双机通信,通信接口芯片则采用MAX1490。
二级网络通过通信控制模块接入一级网络,与上位机之间实现数据交换。由于二级通信网络为ISA 总线组成,其最大数据传输速率可达16Mbit/s,所以监控系统的整体通信速率主要由一级网络决定。一级网络由RS-422 总线构成,通信速率在短距离内可以达到10Mbit/s,可以满足系统通信的实时性要求。一级网络采用10位异步串行通信方式,波特率设置为115.2kbit/s。
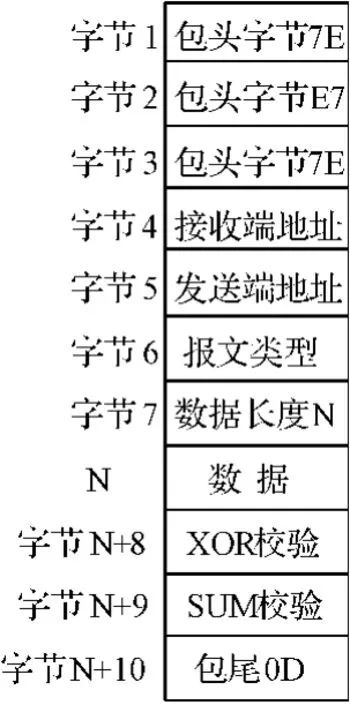
图2 数据帧格式
为了保证通信的可靠性以及避免发生数据冲突,监控系统采用自定义的统一通信协议,采用的数据帧格式如图2所示。三个包头字节为帧同步字节,发送与接收端地址字节则说明了数据帧的来源与去向,报文类型字节作为判断不同命令类型的依据,考虑到通信的实时性与通信软件设计的简便性,数据校验只采用异或和累加两种方式。
监控系统的通信流程如图3所示。上位机的命令报文主要分为状态查询命令、控制命令、启动录波命令和波形查询命令四类。
5 监控可靠性设计
如前文所述,二级网络各功能模块的双口RAM 为共享的数据缓存区,因此检测的主要对象是各模块的双口RAM。检测由总线控制模块完成,采用模式校验法。在每一个工作节拍下,总线控制模块将一个固定数据块写入各双口RAM,然后读出,观察数据是否一致,从而判断双口RAM 是否正常。各个双口RAM 的状态检测结果作为一个独立的子数据块保存在总线控制模块中,供上位机查询。二级网络的同步触发脉冲也受到检测,一旦无同步触发脉冲,则由开关量输出模块动作,点亮失步告警指示灯。一级网络的各录波模块均配备工作状态指示灯,当录波模块出现故障时,告警指示灯闪烁,此时可更换备用的录波模块。

图3 通信流程
6 现场测试结果
现场用三相调压器和可调电阻器组成测试电路,对船舶电站监控系统的实时数据监测功能进行测试,测试的五组数据如表1所示。
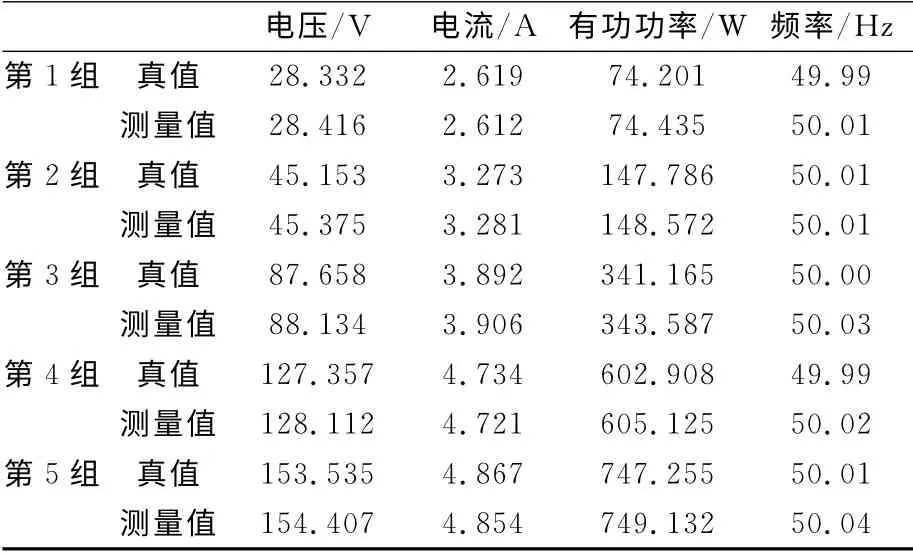
表1 现场测试结果
其中电压、电流真值从高精度电压电流表读出(相对误差在0.05%以内),有功功率真值为直接运算所得,频率真值由数字示波器测得。监控平台的采样结果为测量值,其中电压电流测量值均为有效值且同相位。从表1可得,电压有效值的最大测量误差小于0.6%,电流有效值的最大测量误差小于0.4%,有功功率的最大测量误差小于0.8%,频率测量准确度可达99.94%,达到了设计要求。
7 结语
本文介绍的基于实时数据同步交换技术船舶电站监控系统,可以实现大型船舶电网电气参数的实时同步监测。监控系统采用模块化设计,具备较高的可靠性和良好的可扩展性,各监控功能模块之间采用双口RAM 作为共享的数据缓存区,并采用了同步读写触发机制和统一的通信协议,实现了监控数据的实时同步交换,保证了监控的实时性。本技术方案通用性较好,可适用于船舶机舱监控以及其它工业实时监控场合,具有一定的应用前景。
[1]邵开文,马运义.舰船技术与设计概论[M].北京:国防工业出版社,2005.
[2]陈浩,杨传顺.舰船电力系统的监控与数据采集[J].仪表技术,2011(12):27-30.
[3]俞万能,褚建新,顾伟.基于数据融合的船舶电网参数测量研究[J].中国造船,2007,48(1):64-69.
[4]王虹飞,向先波,刘土光.船舶电站实时监控系统通信软件设计[J].船舶工程,2007,29(3):78-81.
[5]李文华,邱志强,孙瑜,等.基于现场总线的船舶电站实时监控系统研究[J].舰船科学技术,2005,27(2):39-41.
[6]贾宝柱,任光,王冬捷,等.船舶机舱综合监控系统可靠性分析及设计[J].大连海事大学学报,2003,29(1):27-30.
[7]刘乐善,叶继勇,叶永坚.微型计算机接口技术原理及应用[M].武汉:华中理工大学出版社,1996:97-98.
[8]王学军,彭晓涛,程时杰,等.基于ISA 总线和RS-485网络的高温超导磁储能监控系统[J].电力自动化设备,2006,26(6):63-66.
[9]李刚,王少荣,程时杰.一种监控系统实时数据同步交换的新方法[J].继电器,2004,32(12):51-55.
[10]李大中,王建勇,谭悦,等.内存映射技术在电力监控软件开发中的应用[J].电测与仪表,2005,42(4):51-54.
[11]武兴悦,石丽梅,王钢.基于ODI的应急数据交换、共享平台的研究与实现[J].计算机与数字工程,2009,37(9).
猜你喜欢
电气技术(2022年8期)2022-08-20
通信电源技术(2020年24期)2020-05-06
电子制作(2018年11期)2018-08-04
中国广播(2016年11期)2016-12-26
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
企业技术开发·中旬刊(2014年10期)2014-10-30
汽车维护与修理(2014年10期)2014-02-28
