
基于R5F212L4 的无刷直流电动机控制系统设计
2013-11-22 07:51钟名宏杜泽华
微特电机 2013年9期
吴 军,钟名宏,杜泽华
(江西理工大学,江西赣州341000)
0 引 言
无刷直流电动机具有结构简单、噪声低、调速和起动特性好、转矩大等优点,在工业控制、医疗器械及家电等方向应用越来越广泛。无刷直流电动机系统包括电机本体、位置传感器、电子开关电路[1]。应用中有无位置传感器和有位置传感器两种系统之分,两者有各自的优缺点,实际应用中应结合场合选取合适方案。FCM8202 是一款硬件实现无刷直流电动机SVPWM 驱动的芯片,性能稳定、通用性强、噪声小、效率高、实现无级调速等优点。针对该FCM8202 价格高的缺点,提出一种基于瑞萨R5F212L4 的无刷直流电动机SVPWM 驱动系统。本系统具备其优点的同时,也大大降低了成本,还具有实现简便、计算量小,方便添加其他功能模块多种优点。
系统使用方波型无刷直流电动机,文中没有特别声明时,出现的角度为电角度,周期为电周期。
1 系统控制策略及硬件实现
系统使用有霍尔传感器电机,设计方案为三闭环直流调速系统,即速度闭环和正弦波相位闭环。闭环一、根据霍尔周期计算瞬时转动速度,与速度参考值比较得到速度误差信号,经过PI 调节控制器,输出控制增大或减小占空比;闭环二、转子每60°更新霍尔信号时,软件实施强制矫正,输出正弦波电压相位,使电压相位与转子位置相对应;闭环三,通过对三相电路的某相(本文取A 相)下管电流检测,获得其上升沿过零点,结合计时器计算此时角度,如果滞后反电动势相位,则使输入电压超前一个单位,使电流相位与反电动势的相位差不断减小,直至为零,此时电机运行于稳态。通过以上方法实现电机稳定运行,调速平滑。方案设计的硬件控制结构如图1所示,图中的α 是离散的角度时刻。系统主控芯片采用R5F212L4,内置闪存,最高工作频率20 MHz,定时器RD 多通道PWM 输出简化了电机控制过程。同时具有丰富的I/O 端口,9 通道AD,多个外部中断引脚。具有较大的价格及性能优势。
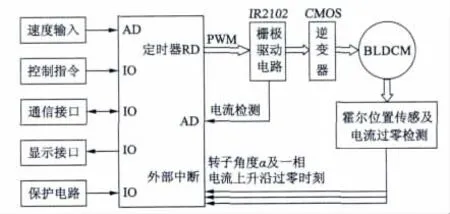
图1 基于R5F212L 的系统结构
系统采用集成CMOS 管实现变频器,应用IR2012 的6 个输出端口直接驱动6 个CMOS 栅极。系统驱动电流与反电动势相位差大小直接影响电机转矩输出,当此相位差为零时,此时电流相对转子磁场相位相差90°电角度,使得电机转矩最大。正弦波电流过零检测是为了校正对不同参数电机进行电压相位自适应超前,锁定电流与反电动势相位差为零。系统驱动电路及电流过零检测电路如图2 所示。
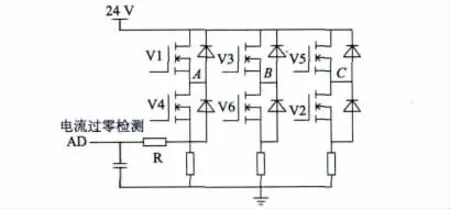
图2 系统驱动电路及A 相电流过零检测
2 霍尔元件安装及转子位置估计原理
转子位置是电机运行的重要参数之一,若转子位置检测不准确,转子估算偏差较大,都会直接影响控制,导致控制不正常或者烧毁电机。
在电机内部相距120°安装3 个霍尔开关传感器,当转子转动时,霍尔元件就会输出一个上升沿和下降沿与转子磁场强度B 的过零点相对应的方波信号[2]。霍尔信号的输出应与某相绕组的空载反电动势同相位[3]。电机转速及转子角度取决于该信号,若安装传感器时偏离理想位置就会给系统带来很大的误差,会给系统带来不稳定性因素。
设定子三绕组对应霍尔信号分别为Hu、Hv及Hw,其值“1”表示霍尔信号为高电平,“0”为低电平。本文中电机产生的霍尔信号与转子位置在程序中对应关系如表1 所示。
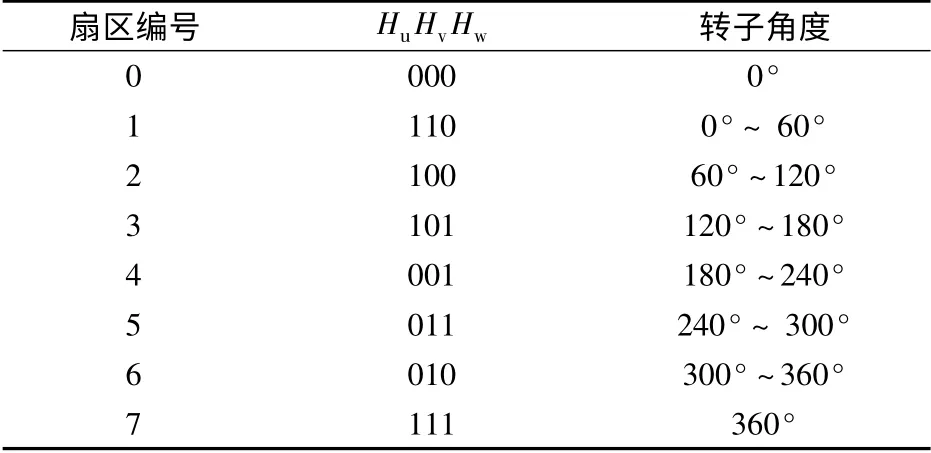
表1 霍尔信号与转子角度对应关系
电机运行的电周期采用如图3 所示方法计算,其中T 为霍尔周期。
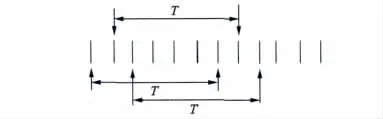
图3 减小霍尔安装误差的转动周期计算
图中最上竖线表示霍尔传感器上升沿和下降沿信号,间隔为60°电角度。每过60°电角度强制矫正运行角度。如下:
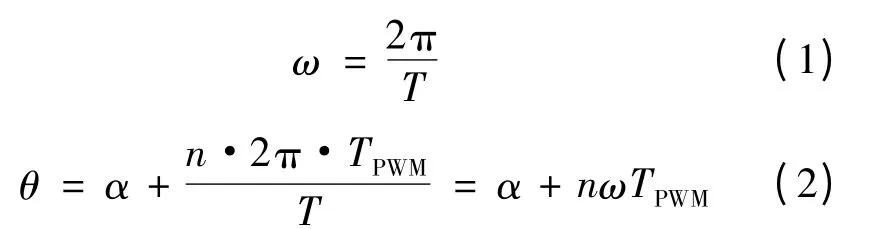
式中:ω 为转子角速度,T 为转子周期,θ 为正弦相位角度,α 为转子对应扇区起点,TPWM为程序中PWM信号周期,n 为第几个PWM 周期。其中ω、T 及α每60°角度更新,θ 及n 每PWM 周期更新。
3 控制系统的软件设计
控制软件主要有系统初始化、转子速度和位置计算模块、相位校正模块、SVPWM 波形输出模块、系统故障显示及保护模块组成。
3.1 电流与反电动势相位关系及相位校正
电机A 相等效电路模型如图4 所示,电压与电流关系如下:

图4 A 相等效电路模型

可以看出电压与电流有相位差存在。由于电机参数不同,导致电压与电流相位差不是固定值。电机控制中期望使电流与反电动势相位差为零,并且电流相位恒定在超前转子角度90°,使其在高效率下工作。相位校正前后电压、电流及反电动势对应转子角度波形如图5 所示。
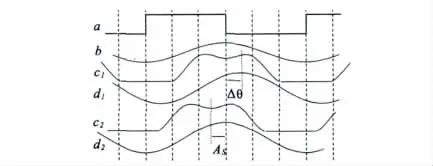
图5 电压电流及反电动势对应转子角度波形
图中,a 为霍尔信号,b 为相反电动势,c1和c2为不同相位相电压,d1和d2为不同相位电压对应的相电流,Δθ 为相电流与相反电动势相位差,As为相电压与相电流相位差。
通过调整相电压相位使Δθ 趋于零,使电流与相反电动势同相,锁定此时的相位偏移即达到相位校正目的。程序流程图如图6 所示。
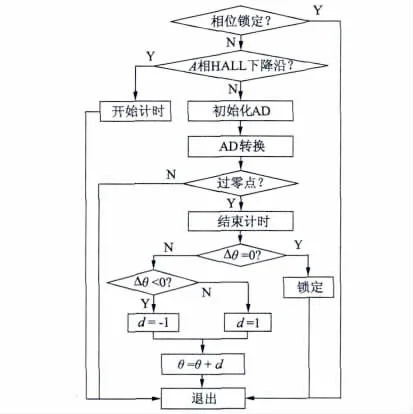
图6 相位校正程序流程图
其中,一个霍尔周期计时一次,即θ 校正一次,θ为转子位置角,d 为相位校正步距(图6 中校正步距为1°)。
3.2 SVPWM 输出设计
为了减小电子开关频率,提高其使用寿命,FCM8202 中采用了上管不导通时下管常开策略。同时为提高电能利用率,加入三次谐波,产生相电压波形如图5 中相电压。SVPWM 输出是定时获取转子角度,通过查表输出对应角度的三相电压值,程序流程如图7 所示。
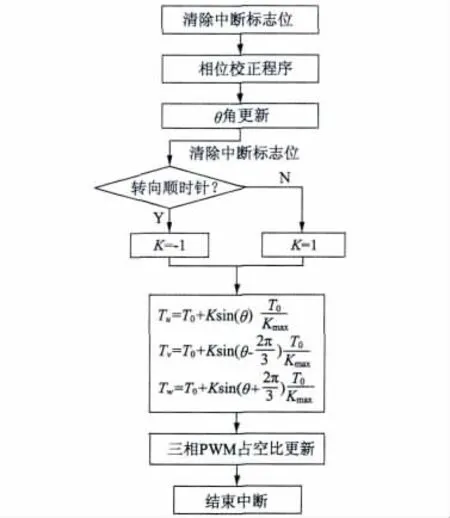
图7 中断程序实现正弦波调制
图中,θ 为转子位置角,T0为,Tu、Tv、Tw为三相上管的导通占空比,TPWM为PWM 周期,Kmax为正弦表的幅值。
4 结 语
为了验证本文驱动系统的自适应性,实验中使用霍尔传感器无刷直流电动机,定子绕组为三相星形连接,磁极对数为2,相感抗为0.05 mH,相阻抗为350 mΩ,最大转速3 000 r/min,24 V 给电机供电。在3 000 r/min 时,最大容许电流为3.5 A,转矩常数为10.8 N·m/A。当占空比为98% 空载时,转速3 000 r/min,电流为450 mA,在300 r/min 时,电流为90 mA,电机运行平稳,电流较小,振动噪声小,实现无级调速。
本文SVPWM 驱动系统有如下优点:
(1)通过软件设计进行相位校正后,解决了由电流与转子相位差不固定在90°所带来的电源低效率、电机大电流运行发热等问题,使电机运行于最大转矩、最小电流环境下,达到高效率运行。
(2)电机系统起动平稳,运行时无振动和失步现象,同时系统结构简单,运行可靠,正反转调速性能良好的优点。该方法计算量小,对MCU 的要求低,在低直流母线电压的中小功率应用场合具有技术优势。
(3)系统实现简便,计算量小,可以方便地添加其他功能模块,增强系统的可扩展性。
[1] 张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2004.
[2] Capponi F G,De Donato G,Del Ferraro L.AC brushless drive with low resolution Hall-effect sensors for an axial flux PM machine.[C]/ /39th Industry Applications Conference Annual Meeting.2004,4:2382-2389.
[3] 邹继斌,徐永向,于成龙,等.正弦波无刷直流电机的新型转子位置检测方法[J].中国电机工程学报,2002,22(12):47-49,55.
[4] 曾风平,郑成勇,章跃进,等.基于开关型霍尔位置传感器的永磁同步电动机正弦波驱动[J].微特电机,2010,38(8):56 -58,71.
猜你喜欢
微电机(2022年8期)2022-10-12
房地产导刊(2021年12期)2021-12-31
微特电机(2021年11期)2021-11-16
国学(2020年1期)2020-06-29
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
童话王国·文学大师班(2017年6期)2017-07-10
