
电动车独立驱动控制策略分析与设计
2013-11-22 07:51赵宝伊李声晋
微特电机 2013年9期
赵宝伊,卢 刚,李声晋,周 勇
(西北工业大学,陕西西安710072)
0 引 言
随着工业技术的飞速发展,环境污染和能源枯竭业已成为全世界必需面对的重大战略问题,以电能驱动的纯电动车辆以其优异的响应性能与独特的灵活性,必将成为当今最具发展前途的交通工具之一。而控制策略是电动车辆电控驱动系统的核心部分,合理、高效的控制策略可以提高运动控制系统的性能。独立驱动电动车辆,在控制策略设计过程中需考虑以下三个问题:如何在车载主控制器和伺服分控制器之间合理分配资源,确保电动车辆具有快速响应性;由于电动车辆各个独立驱动单元存在差异,如何保证多电机协调响应,确保车辆平稳运行;由于独立驱动式电动车辆具有特殊的车体结构和运动单元,如何利用该特殊性实现车辆全电控方式的差速转向。
为满足电控驱动系统高功率密度和强伺服性能的要求,本文选用永磁无刷直流电动机作为电动车辆的驱动电机,并采用PWM 双极性调制方式实现对无刷直流电动机的驱动控制。针对无刷直流电动机调速控制,本文提出一种非线性模糊PID 参数自调节算法用以适应电动车辆宽调速范围要求,提高电动车辆电控驱动系统的动态响应性能和稳态精度。
1 控制策略总体方案设计
控制策略系统的任务是令电动车辆完成相关的动作,包括正常行驶、制动、后退以及差速转向等。因此,系统总体方案设计在功能上应满足以下要求:
(1)通讯单元
本文电动车辆电控驱动系统采用CSHA 控制结构,上位机测控单元与车载主控制器之间通过串行通讯进行数据交换,主控制器和多个伺服分控制器之间全部采用CAN 总线进行通讯,控制策略应完成相应的通讯接口设计并制定完备的通讯协议以满足实时、准确的通讯要求。
(2)无刷直流电动机转速模糊PID 参数自调节设计
车载主控制器通过CAN 总线获取多台伺服分控制器上传的每个电动轮的实时转速,与上位机下达的目标转速进行对比,完成模糊PID 参数自调节算法,将解算后的PWM 占空比值发送给各个电动轮,实现电动车辆闭环调速过程、转向控制及其他相关动作。
(3)无刷直流电动机驱动单元
车载伺服分控制器完成电动车辆电动轮的“独立驱动”功能,根据主控制器下达的PWM 占空比值,调节各自控制的无刷直流电动机达到所要求的转速或移动位置。同时通过通用I/O 管脚获取电机霍尔位置传感器信号,进行转速计算并上传至车载主控制器。
(4)传感器信息采集单元
本文电动车辆电控驱动系统加装了两种外置传感器,分别是陀螺仪和加速度传感器,伺服分控制器通过A/D 端口获取传感器信号,得到车辆的有关运行状态以及周围的环境信息,并通过主控制器最终上传至上位机监测单元,便于车辆的稳定运行。根据上述的控制策略功能描述,电控驱动系统的控制策略设计主要分为两部分:车载主控制器策略和伺服分控制器策略。各个部分又包括不同的功能单元,每个单元采用模块化的编程思想,使控制策略具有方便阅读、稳定性高、可移植性强的优势。图1 是控制策略结构框架图。
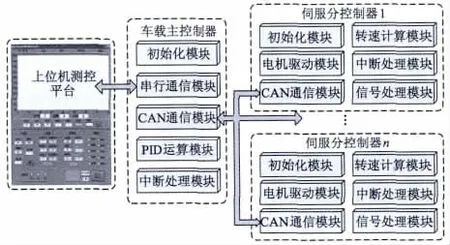
图1 控制策略总体结构框图
本文电动车辆电控驱动系统控制策略工作流程为:系统上电后,车载主控制器和伺服分控制器各自执行初始化程序;初始化通过后,主控制器通过串行通讯接收上位机测控平台的指令信息,并将指令数据解算后通过CAN 总线发送到各伺服分控制器;伺服分控制器接到PWM 值后,起动电机,并实时读取无刷直流电动机的霍尔信号和角位置信号,反馈给主控制器;主控制器比较上位机的指令和接收到的反馈信息,通过模糊PID 参数自调节算法进行PWM占空比值更新,将实时更新的PWM 传送给伺服分控制器,完成车辆闭环控制。
2 车载主控制器控制策略设计
2.1 主控制器总体控制流程
独立驱动式电动车辆电控驱动系统车载主控制器的控制策略功能主要是实时接收、发送指令信息,并进行相应的数据处理,各个功能均采用模块化设计。主控制器程序流程图如图2 所示。
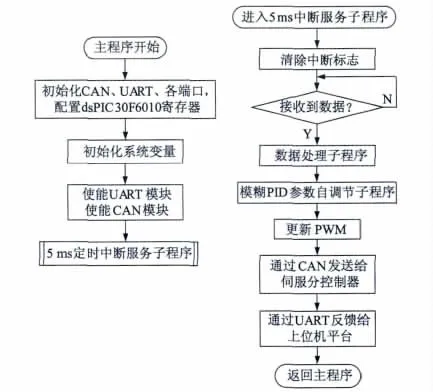
图2 车载主控制器控制策略流程图
程序中初始化模块完成CAN 总线和UART 中断设置、寄存器设置、系统时钟设置等。执行完初始化后,系统开启UART 和CAN 进行数据接收,接收到数据后通过数据分类代码判断属于何种类别,然后经过比较、解算,完成模糊PID 参数自调节算法等数据处理过程,通过CAN 总线将更新后的PWM 发送给相应的伺服分控制器,由分控制器最终驱动电机进行相应动作。
2.2 无刷直流电动机模糊PID 参数自调节算法
无刷直流电动机模糊PID 参数自调节算法流程图如图3 所示。
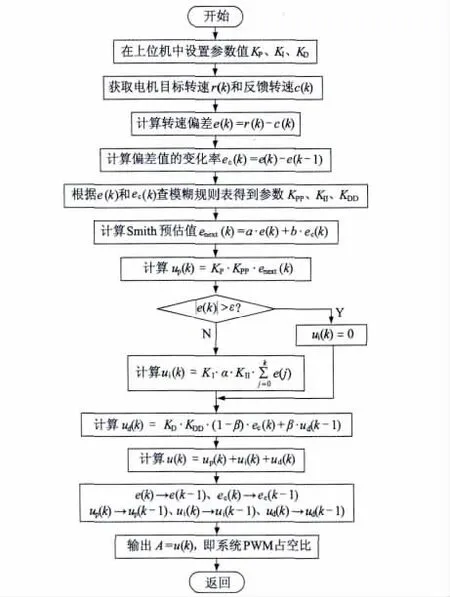
图3 无刷直流电动机模糊PID 参数自调节控制流程图
根据无刷直流电动机转速模糊PID 参数自调节控制方法,控制器由dsPIC30F4012 获取无刷直流电动机的实时转速,在dsPIC30F6010 中实现模糊PID算法。图3 中Smith 预估部分的系数a 和b、积分分离部分的系数ε 以及不完全微分的系数β,均可以根据系统的不同需要作出适当调整。
3 车辆伺服分控制器控制策略设计
分控制器主要完成与主控制器的CAN 通讯,驱动对应的电机做出理想的动作,并将自身状态传给主控制器,所以整个控制策略的结构由主程序和CAN、MCPWM、ADC 等中断服务子程序组成。主程序流程图如图4 所示。
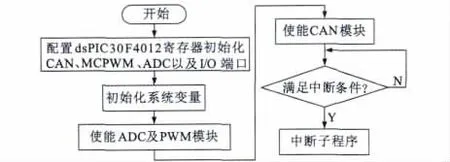
图4 伺服分控制器主程序流程图
系统上电后先进行初始化,完成对各个模块的设置,并打开中断,然后等待中断条件发生。
4 独立驱动式电动车辆运动策略设计
独立驱动电动车辆正常运行时需要各个单元协调动作,本文将对电动车辆的整车运动控制策略的设计进行分析。
4.1 电动车辆多电机协调控制
(1)车辆直线行驶模块
为了提高电动车辆调速响应性和调速稳定性,保证独立驱动电动车辆的行驶协调性,可以利用电机转速模糊PID 参数自调节控制算法对电动轮进行转速闭环控制。
(2)转向稳定控制模块
为了确保车体运行稳定,本文设计了电动车转向稳定控制策略:
(a)若车辆处于高速行驶时有转速指令发生,控制器自动将PWM 占空比降低(即暂不考虑原有速度指令),待车速降至安全范围时系统进入车辆转向模式;
(b)车辆进入转向模式后,控制器保持PWM以较低的占空比值输出(即不考虑加速指令,保持无刷直流电动机以较低的转速运行),同时依据计算得到的转速,开始实施转向;
(c)转向指令完成后,各个电动轮的PWM 占空比值恢复正常控制,车速也随之作相应变化(继续履行加速指令或提速以使车辆继续高速行驶)。
转向稳定控制模块流程图如图5 所示,其中v为电动车轮速度,T 为电动车轮转矩。
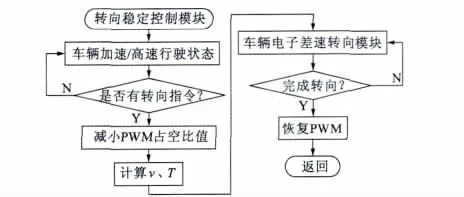
图5 转向稳定控制模块流程图
4.2 独立驱动式电动车辆电子差速设计
独立驱动式电动车辆在转向过程中,由上位机(轮式移动机器人)或其他外部装置(电动轿车)提供信号输入,指令进入车载主控制器经解算后,主控制器给各个伺服分控制器提供不同的PWM 占空比,实现电子差速。
系统对多个电动轮同时进行速度控制和差速计算,下面将对电子差速控制策略进行详细分析。
众创空间在整合资源时,首先要设计清晰的利益机制,不同的资源依附于不同的利益相关者。专利、技能、知识、创意是众创空间运营过程中不可或缺的创新资源要素,这些要素往往依附于行业专家、高校学者以及科研人才,可以采用众包形式将创业项目分解给这些利益相关者来完成,在利益机制上可以采用公开悬赏、竞赛等多种公开方式,链接高端资源,寻求创新创意以及技术解决方案,最终通过利益机制将各种创新要素编织成高效率的创新网络。
(1)电动轮转速分析
如图6 所示,假设某时刻电动车的运动模型为Ackermann-Jeantand 模型,其中:δ 为电动车辆转向角;δin为前内侧轮转向角;δout为前外侧轮转向角;L 为车身长度;W 为车身宽度;R 为转向半径,;Rin为内侧轮转向半径;Rout为外侧轮转向半径;Cin为内侧轮行驶距离;Cout为外侧轮行驶距离。
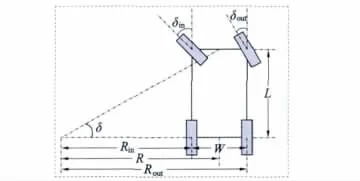
图6 Ackermann-Jeantand 车辆转向模型
以图6 为例,假设当电动车辆以速度v 逆时针转向,四个电动轮分别定义为:左前轮转速为vlf,右前轮转速为vrf,左后轮转速为vlr,右后轮转速为vrr,则有:
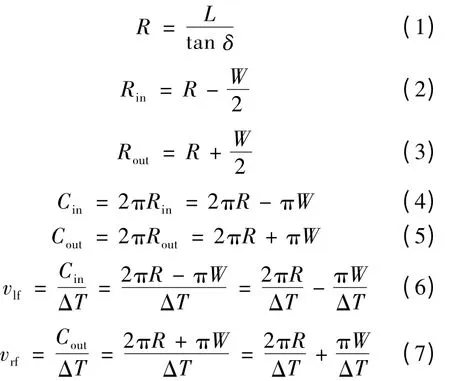
式中:ΔT 为车轮转过一圈所需时间,设无刷直流电动机的转速为v,则有:

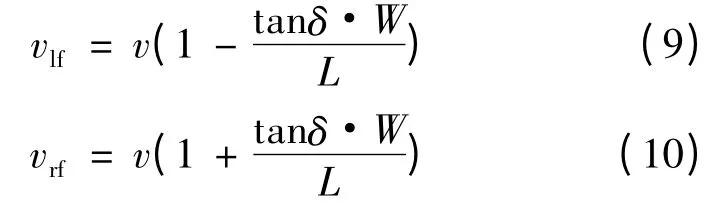
因此式(6)和式(7)可以简化:
根据图6 的模型,可以由式(11)计算vlr和vrr:
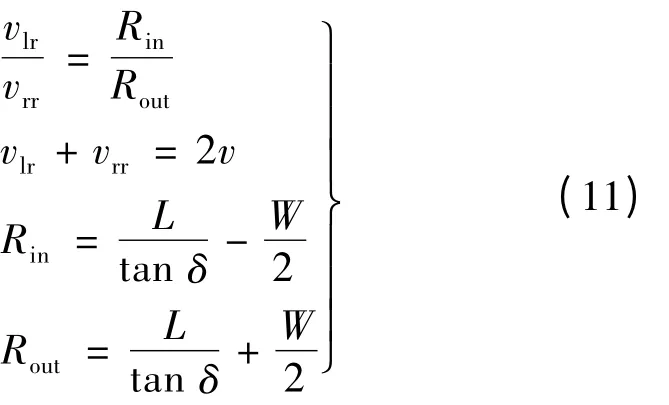
解得:
(2)转向控制流程
本设计在转向控制策略中定义了以下几种状态:STOP 表示车辆停止,准备调头;RUN 表示车辆正常行驶;ACCELERATE 表示加速状态;DECELERATE 表示减速状态;CONSTANT SPEED 表示匀速运行状态;U-TURN 表示车辆调头。
车辆进入转向控制模块后如果发生STOP 状态,则意味着车辆减速至停车,准备进行调头动作,图7 是整车转向时的控制策略流程图。
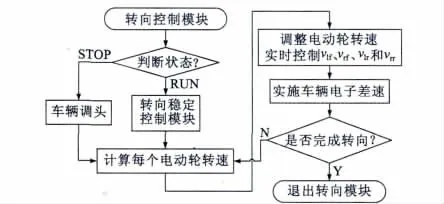
图7 独立驱动式电动车辆转向控制流程图
4.3 电子差速仿真分析
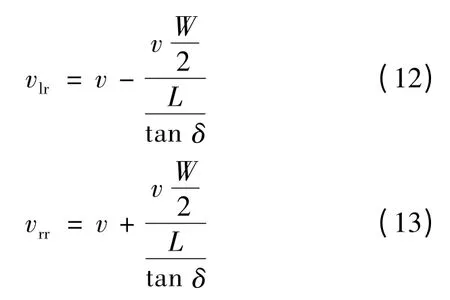
根据电动车辆不同的转向角度δ,四个电动轮的速度分配公式如式(9)、式(10)、式(12)和式(13)所示。
对实验样车测量后得L = 2.6 m、W = 1.55 m,因此可知:
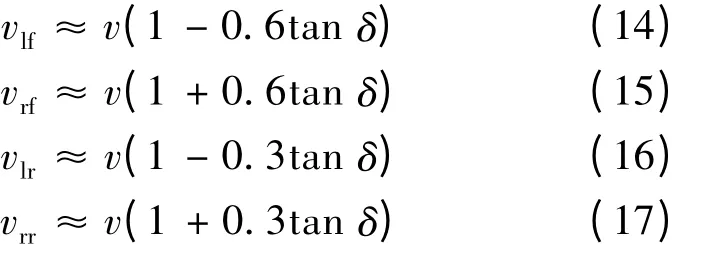
根据上述四个转速计算公式,分别取v = 2 m/s、v = 4 m/s、v = 6 m/s、v = 8 m/s、v = 10 m/s,并且对电动车辆前轮转速vlf和vrf的计算结果进行对比,仿真结果如图8 所示。
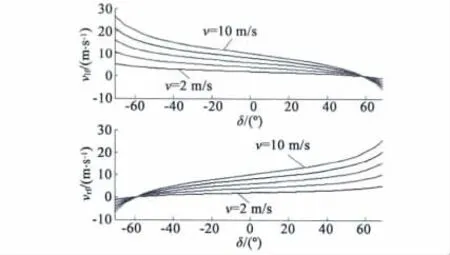
图8 不同车速下车辆转向时vlf和vrf的对比图
由上述仿真结果可以证明,本文独立驱动电动车辆的电子差速设计正确,运行结果良好,符合设计要求。
5 实 验
为了验证电动车辆控制策略的合理性和可靠性,本文利用一款轮式机器人车辆样车作为实验平台。整个样车采用对称结构,由四个结构尺寸完全相同的独立运动单元和车体构成。如图9 所示,每个运动单元主要由一个电动轮和一个转向电机组成,为了提高车辆的越障功能,在每个运动单元中还增加了一个摆臂和一个助动轮。转向电机用以驱动独立的运动单元实现绕支点的转向动作,协助完成车辆的电子差速功能。摆臂布置在车轮的内侧,由安装在转向臂上的电机通过减速器驱动,可以绕着驱动轮中心轴正反向全周摆动。
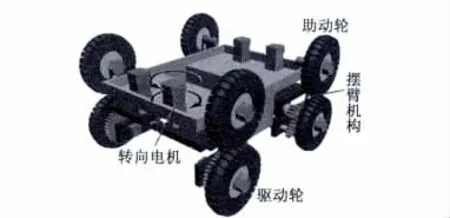
图9 车辆原理图
5.1 电子差速性能实验
以轮式机器人车辆作为实验平台验证电子差速控制策略,实验过程如图10 所示。

图10 轮式机器人车辆电子差速实验
该实验以车辆向左20°的角度转向,图中虚线为电动车辆的转向行驶轨迹。
图11 给出了机器人车辆左转20°时各个独立电动轮的转速变化,车辆直线行驶时系统默认的角度为180°,车辆左转为180°→0°运行,右转为180°→360°运行。为了将车辆行驶角度值和无刷直流电动机转速显示在同一窗口,车辆行驶的角度值在上位机测控平台显示时自动放大了10 倍。
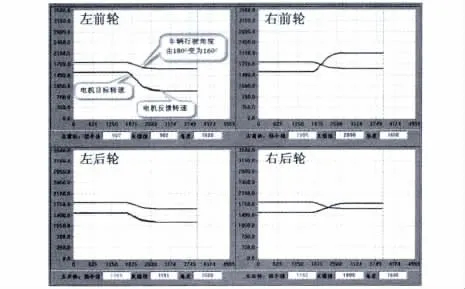
图11 车辆左转20°时各个电动轮转速变化对比图
5.2 电动车辆越障实验
为了验证控制策略的可靠性,本文以轮式机器人车辆为实验平台,进行了越障实验。试验台是以数块木板叠放而形成的,经过反复实验,得出该电动车辆样车可以越过的最大台阶高度是187 mm,运动过程如图12 所示。
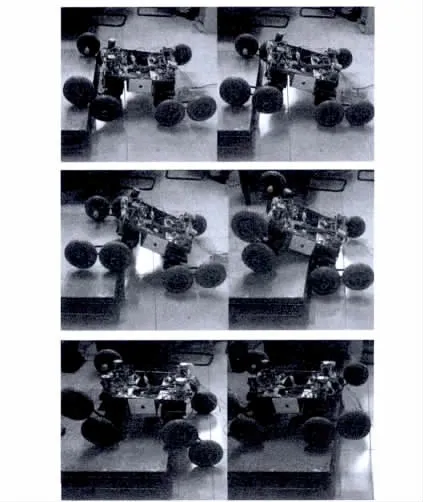
图12 轮式机器人车辆上台阶实验
6 结 语
本文详细分析了独立驱动电动车辆电控驱动系统控制策略的设计,提出了主控制器控制策略和伺服分控制器控制策略。对电动车辆整体运动策略,尤其是全电控方式的车辆差速转向部分进行了详细研究,并进行了仿真和相关实验。结果表明,车辆控制算法正确,控制策略设计合理。
[1] Zhou Y,Li S J,Zhou Q X.The control strategy of electronic differential for EV with four in-wheel motors[C]/ /The 22nd Chinese Control and Decision Conference.2010:4190-4195.
[2] Harmon R R,Cowan K R.A multiple perspectives view of the market case for green energy[J].Technological Forecasting and Social Change,2009,76(1):204-213.
[3] Walsh M P.Ancillary benefits for climate change mitigation and air pollution control in the world's motor vehicle feets[J].Annual Review of Public Health,2008,29:1-9.
[4] Micklethwait J.More of everything[J].The Economist,2006(38):18-19.
[5] Steinfeld J I.Energy futures and green chemistry:competing for carbon[M].Sustainability Science,2006,1(1):1862-4057.
[6] 周勇,李声晋,田海波,等.四轮毂电机电动车的电子差速控制方法[J].电机与控制学报,2007,11(5):467-471.
[7] 北京市大气污染综合防治对策研究课题组.北京市大气污染综合防治对策研究[R].北京:清华大学,2001:52-53.
[8] 曹秉刚,张传伟,白志峰,等.电动汽车技术进展和发展趋势[J].西安交通大学学报,2004,38(1):1-5.
[9] 闫清东,魏丕勇,马越.小型无人地面武器机动平台发展现状和趋势[J].机器人,2004,26(4):373-379.
[10] 周勇,李声晋,田海波,等.四轮独立驱动电动车的ABS 控制方法[J].汽车工程,2007,29(12):1046-1050.
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
浙江共产党员(2014年12期)2014-07-10
