基于平均电流控制的双闭环改进控制策略
2013-11-21 08:00陈亚爱周京华
电机与控制应用 2013年10期
陈亚爱,薛 颖,周京华
(北方工业大学机电学院电力电子与电气传动工程中心,北京 100144)
0 引言
随着数字信号处理技术和半导体技术的高速发展,数字控制由于其控制理论与实施手段不断完善,且具有高度集成化的控制电路、精确的控制精度、稳定的工作性能等优点,如今已成为电力电子学的一个重要研究方向。基于数字控制的电力电子装置具有较好的系统性能,并已得到了广泛应用,数字控制也是最终实现电力电子装置模块化、集成化、数字化及绿色化的有效手段[1]。同时,具有高功率因数、低谐波污染的绿色电力电子装置已成为国家对电能发展的要求及战略。因此,采用数字控制方法实现“绿色能源”已势在必行。以功率因数控制器(Power Factor Controller,PFC)为控制对象,在分析了功率因数校正及其控制原理的基础上,提出一种双闭环改进控制策略,采用MATLAB仿真软件对平均电流控制的单相Boost型数字功率因数校正变换器进行了建模与仿真研究。
1 功率因数校正原理
1.1 功率因数定义
功率因数(Power Factor,PF),定义为交流输入有功功率与视在功率的比值,其表达式为

式中:URMS——电网电压有效值;
IRMS——电网电流有效值;
IRMS1——基波电流有效值;
γ——电网电流交流失真因数(又称基波因数),γ=IRMS1/IRMS,其值一般用百分数表示,称为总谐波失真(THD);
cosφ——基波电压和基波电流的相移因数。因此,PF又可定义为失真因数与相移因数之乘积。
1.2 PFC
PFC,即为功率因数校正器或功率因数补偿器,其作用是保持交流输入电流与交流输入电压同相位,并滤除电流谐波,使设备的功率因数提高至接近于1的某一预定值。
PFC种类繁多,按其工作方式划分,可分为无源PFC(Passive PFC,PPFC)和有源 PFC(Active PFC,APFC)。PPFC一般采用无源器件——电感进行补偿;APFC则是在输入整流桥与输出滤波电容之间加入一个功率变换电路进行功率因数校正。前者电路结构简单、成本低廉、可靠性高、EMI小,但体积、重量大,且容易产生噪声,难以获得高功率因数(一般仅可提高到约 0.9)[2-3]。因此,本文采用APFC方式,其功率变换电路选用Boost电路。
2 PFC控制原理
目前,基于乘法器控制实现APFC的三种基本方法为峰值电流控制、滞环电流控制及平均电流控制。
2.1 峰值电流控制
峰值电流控制的输入电流波形如图1所示。开关管在恒定的时钟周期导通,当输入电流上升至基准电流时,开关管关断。采样电流来自开关电流或电感电流。
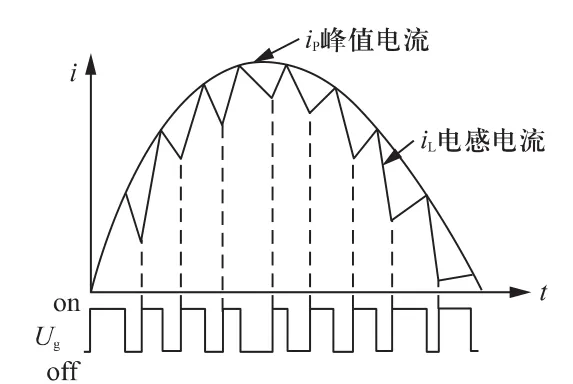
图1 峰值电流控制的输入电流波形
2.2 滞环电流控制
滞环电流控制的输入电流波形如图2所示。开关导通时电感电流上升,当其上升至上限阀值时,滞环比较器输出低电平,开关管关断,电感电流下降;当其下降至下限阀值时,滞环比较器输出高电平,开关管导通,电感电流上升。采样电流来自电感电流。
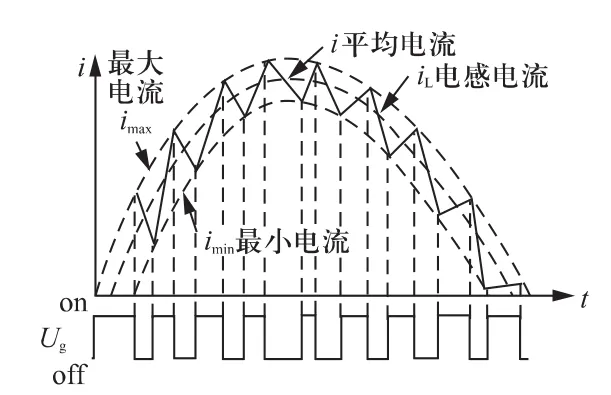
图2 滞环电流控制的输入电流波形
2.3 平均电流控制
平均电流控制的输入电流波形如图3所示。该控制方法是将电感电流信号与锯齿波信号相加,当两信号之和超过基准电流时,开关管关断;当其和小于基准电流时,开关管导通。采样电流来自实际输入电流(电感电流)而不是开关电流[3]。
图3 平均电流控制的输入电流波形
本文对PFC采用双闭环控制方式,如图4所示。外环为电压环,内环为电流环,其中电流环采样电感电流,用平均电流控制。控制策略如下:将整流桥输出的直流电压同输出电压相乘作为电流环的给定,以此实现对输入电流和输出电压共同调节。
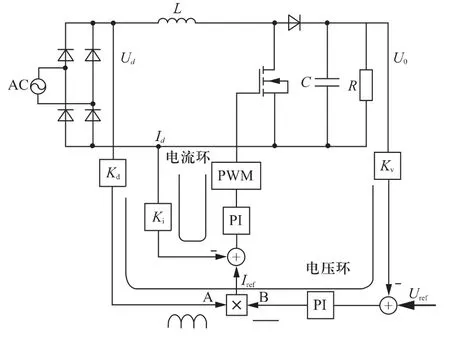
图4 PFC双环控制原理图
3 技术指标及参数选取
由于该PFC是HID灯电子镇流器的一部分,因此其技术指标如下:输入交流电压100~270 V;输出功率318 W;输出电压340 V;开关频率40 kHz;额定负载414 Ω。
按照上述技术指标可计算PFC的储能电感和输出电容。
最大峰值电流:

纹波电流峰峰值:

最大峰值电流时的占空比:
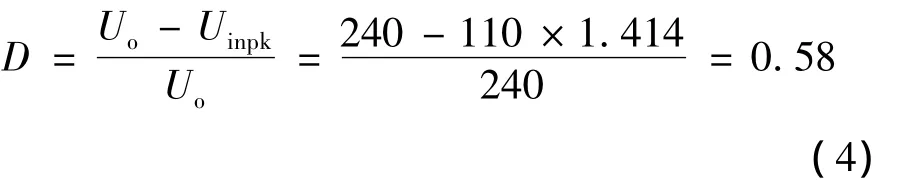
式中:Uinpk——最低交流输入电压经整流后的峰值电压。
电感值:

在具有DC 400 V的输出电源中,维持时间对电容值的要求是每瓦输出1~2 μF。典型维持时间在15~50 ms,论文选取维持时间Δt=34 ms。
输出电容:

基于上述计算结果,将电路的主要参数列于表1中。
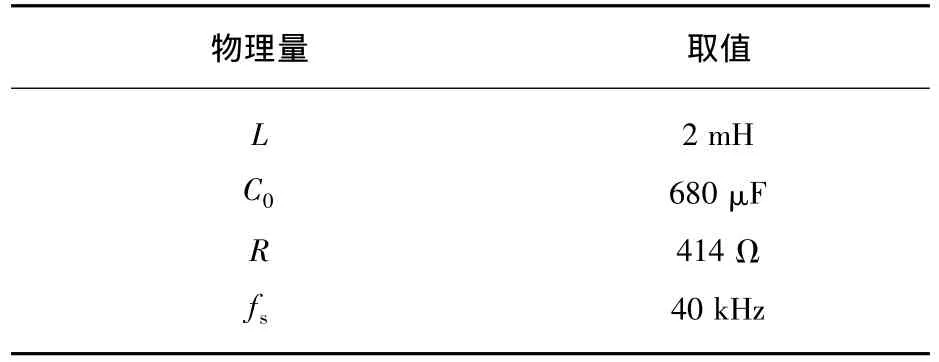
表1 电路主要参数表
4 仿真模型建立与分析
4.1 仿真模型建立
根据PFC控制原理图、技术指标和计算所得参数对平均电流控制进行仿真试验,在MATLAB中搭建了Boost型数字PFC仿真模型。
在主电路模型中,设置 AC电源中 Peak amplitude参数为220、Frequency参数为50;整流桥中 Number of bridge arms参数为 2、Power Electronic device参数为 Diodes;电感 L中Inductance参数为2e-3;电容C中Capacitance参数为680e-6;负载RL中Resistance参数为414;其他参数均为默认值。
在控制模型中,设置各模块的Sample Time参数(即采样时间)为2.5e-5;PWM Generator模块中GeneratorMode参数为1-armbridge(2 pulses),修改该子模块为单极性PWM波,并设置Triangle中 Time values参数为[0 0.5/Fc1/Fc]、Output values参数为[0 1 0];cosPhi子模块实现cosφ的计算。
在控制方面,由阶跃信号控制开关管在电路达到稳态后(0.2 s)才允许开通,进行闭环控制。在PFC控制过程中,若令电压环不间断工作,不断变化的电压环PI调节器输出值将会使电流基准随之变化,从而影响输入电流波形。因此,采取在电压环PI调节器之后加入积分模块计算平均值的方法,仅在过零点处调节输出电压,频率为100 Hz。
4.2 仿真结果分析
图5所示为网侧输入电压与输入电流对比仿真波形。为了便于观测,将电流放大30倍,由图可知,电压波形和电流波形基本同相,观测PFC仿真模型中示波器读数可得cosφ=0.999 4,接近1。

图5 网侧输入电压与输入电流对比仿真波形
网侧输入电流谐波结果由powergui模块中的FFT工具箱分析得到,系统的总谐波失真THD=1.51%,小于国家标准(5%)。
图6所示为输出电压波形。由图可知,输出电压稳定在340 V,电压纹波为5 V,小于国家标准(1.5%)。
图7所示为0.25 s时刻突降负载为额定值的70%时输出电压波形。由图可知,电压上升了7 V,电压上升率为2%,调节时间为0.05 s,输出电压最终重新稳定在340 V。图8所示为0.25 s时刻突增负载为额定值的130%时输出电压仿真波形。由图可知,电压下降了5 V,电压下降率为1.47%,调节时间为0.036 s。该测试反映了当电路故障、应用环境变化等情况出现时系统的输出电压调节能力,该控制方法虽可使输出电压在短时间内恢复,但无法调节至额定值。
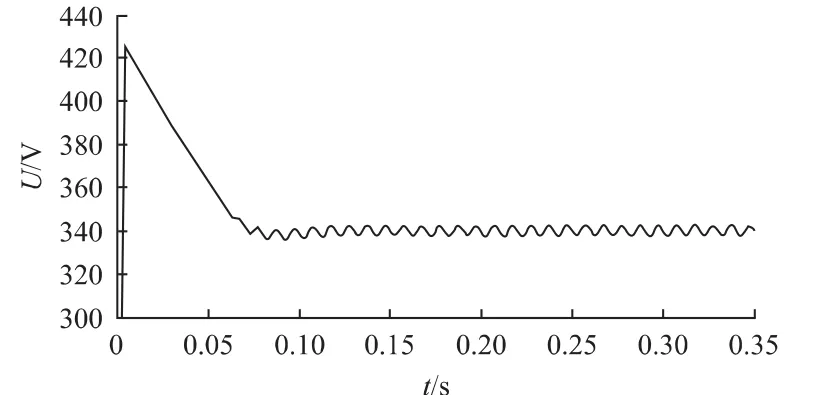
图6 输出电压波形
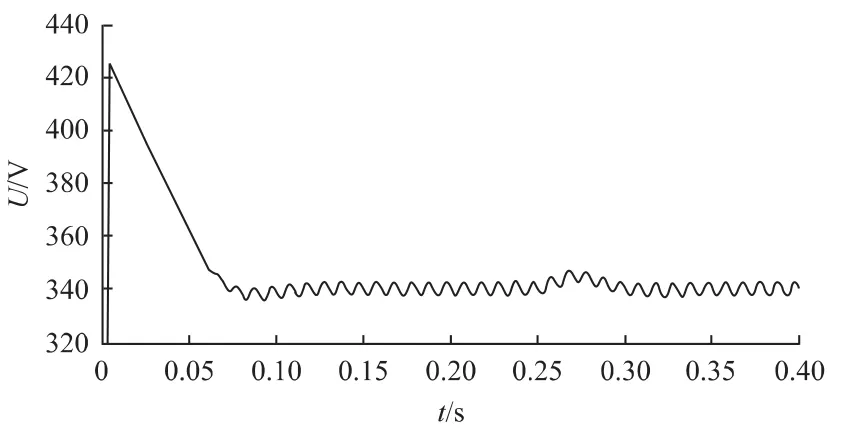
图7 0.25 s时刻突降负载为额定值的70%时输出电压仿真波型
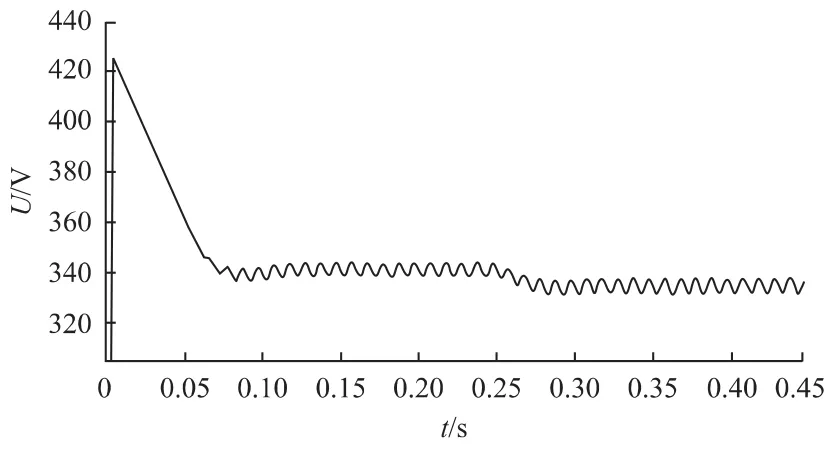
图8 0.25 s时刻突增负载为额定值的130%时输出电压仿真波型
5 结语
论文简述了功率因数校正技术及其控制原理,在分析三种基本控制方法的基础上,利用平均电流控制方式实现改进的数字PFC双闭环控制。根据技术指标计算电路的主要参数,并建立系统仿真模型,在MATLAB/Simulink环境下进行了仿真研究及量化分析,仿真结果表明,cos φ=0.999 4、THD=1.51%,验证了其控制理论的可行性。该改进控制策略既可应用于开关电源控制,亦可应用于电机控制,为相关试验研究及工程应用提供一定参考。此外,需改进之处主要有以下两点:一是浪涌电压和浪涌电流的问题,由于PFC电路中Boost拓扑的结构特点,起动瞬间C充电,产生很大的浪涌电压、电流,但无法通过软件策略实现开机软起,需要在输入端加入软起动电路;二是扰动问题,需要引入前馈控制来解决。
[1]陈新,WU C,HUTCHINGS W.功率因数校正的数字控制技术应用研究[J].南京航空航天大学学报,2007(2):32-38.
[2]沙占友,王彦朋.开关电源优化设计[M].北京:中国电力出版社,2009.
[3]朱方明,余建刚.有源功率因数校正技术原理及应用[J].现代电子技术,2002(10):42-44.
[4]朱延彬,欧阳名三,朱丹,等.对于平均电流模式PFC的仿真研究[J].黑龙江科技信息,2012(2):100.
[5]石榴明璇,谢运祥.基于TMS320F2812的数字控制BOOST-PFC的设计[J].电气自动化,2009(6):34-36.
[6]厉冰,林国淑.开关电源功率因数校正的DSP实现[J].电源技术应用,2003(1):32-34.
[7]TAMYUREK B,CEYHAN A,BIRDANE E,et al.A simple DSP based control system design for a threephase high power factor boost rectifier[C]∥IEEE International Conference on Electric Machines and Drives,2008:1416-1422.
[8]KIM S,PRASAD N E.Parallel-connected single phase power factor correction approach with improved efficiency[J].IEEE transactions on Power Electronics,2004(19):87-93.
[9]GUO L,YU Y L,XU W SH,et al.A novel control technique for digital power factor correction[C]∥IEEE International Conference on Power Elecrronics,2006:1314-1321.
猜你喜欢
国学(2020年1期)2020-06-29
测控技术(2018年9期)2018-11-25
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
电子制作(2016年1期)2016-11-07
通信电源技术(2016年5期)2016-03-22
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年14期)2014-04-04