
少维输入-多维期望运动输出并联机构及其应用
2013-11-06 10:19:18沈惠平邓嘉鸣孟庆梅杨廷力
机械设计与制造工程 2013年6期
沈惠平,邓嘉鸣,李 菊,孟庆梅,朱 伟,杨廷力
(常州大学机械工程学院,江苏 常州 213016)
1 问题提出的背景
1.1 工业领域已存在少维输入-多维运动输出机构
随着工业技术的发展,人们期望能够拥有用最少的输入来产生较多维数空间运动的机械结构,以达到机器结构简单、制造容易、高效可靠、维修方便、节能减排的目的,因此,研发以较少维输入产生较多维期望运动输出的并联机构(简称:少输入-多输出并联机构),成为实现这一目标的良好途径。
首先,工业领域已存在大量一、二维输入但能产生多维输出运动的装置。例如:广泛适用于采矿、建材、公路等行业的单输入复摆式颚式破碎机,将作二维复合平面运动(含平动与转动)并具有3个运动分量输出的连杆BC作为输出件(动颚),如图1所示,当曲柄AB一维输入时,动颚上任意一点S具有沿x轴、y轴向平动以及绕z轴转动的3个输出分量,使物料块在破碎腔下部有较大的上下翻滚运动,并受到均匀破碎,故生产率比同规格的单自由度简摆式颚式破碎机(以一维输出摇杆CD作为动颚)高出20% ~30%;同时还具有质量小、构件较少、结构更紧凑等优点,因此目前已基本取代了简摆式颚式破碎机[1]。

图1 单输入复摆式颚式破碎机机构

图2 单输入平面连杆式振动筛机构
还有广泛应用于冶金、煤炭、粮油、化工等行业的单层筛连杆式振动筛或双层筛连杆式振动筛(如图2所示),当曲柄OA一维转动输入时,安装在连杆AB与DE上的筛箱作包含平动和转动的二维复合平面运动,产生的沿x轴、y轴向的平动以及绕z轴转动的3个输出分量,保证了物料完成上、下抛起及其从入料端到出料端的流动,从而具有较好的筛分效果,且功耗低、运行平稳、占地空间小[2]。
而在多自由度的并联机构中,研究其驱动输入性与输出特性的关系,更有学术和应用价值,如:典型的三自由度3-RPS并联机构(P副主动),当静平台上的3个转动副轴线平行于同一平面时,动平台产生同时包含平动和转动的五维输出运动;而当静平台上的3个转动副轴线不平行于同一平面时,动平台产生同时包含平动和转动的四维输出运动,但在这两种情况下,均只有三维是独立运动,其余的为非独立运动[3]。
1.2 新兴产业的需求
随着战略性新兴产业的兴起,用于助老助残的康复机器人或康复辅具日益受到重视,但目前无论是并联式还是串联式康复装置,其结构都比较复杂,输入驱动太多,不符合康复器具结构简单、质量小、舒适性高等要求;另外,用于复杂危险环境的核污染现场清理、高温矿焦渣清理以及大型污水池清理,以及用于运动娱乐类的摇摆机等一些新型装备[4],都需要用最少的输入来产生较多维数的空间运动,以达到结构简单、制造方便、绿色运行,以及节能减排的目的。
由上可知,用较少的输入数(dof)驱动,可以产生运动输出维数多于输入数目(即:dof+Δ)的空间复杂运动并达到理想的生产效果。基于这种研究思路,作者根据应用需求的不同,提出并联机构可分成两类,以拓展并联机构的应用范围并作深入研究。
2 并联机构的分类、研究问题的提出与表述
2.1 并联机构的分类
目前,一方面,国内外并联机构学术界在理论和应用上,主要研究以多轴并联运动机床为代表的、中等精度以上的数控加工装备,以及进行自动装配操作的装备或操作手,这些装备的每个输出运动都需要独立且精确的控制,即输出运动的数目必须等于机构自由度数目,本文定义该类机构为第Ⅰ类并联机构,即“多维输入与等维精确运动输出并联机构”,对这种类型的并联机构,国内外已有较多的研究[3,5-8]。
另一方面,像大型振动筛、破碎机、矿焦渣清理机、运动模拟器等装备,具有能耗大、机件损耗大、噪声大、作业环境差等特点;而康复训练机、核污染清理机等新兴产业装备,则具有服役环境特殊、高性价比以及要求节能环保等特点。这些装备都要求:减少构件、提高效率;节能降耗、降噪,提高寿命。从运动输出看,这些装备的操作端需要多个输出运动,以保证空间多维操作,要求与独立运动同时伴随的非独立运动一起参与相应的对外操作,但每个输出运动并非都要独立,且输出(含非独立量)的维数要求,高于输出的精度要求;同时,为节能降耗、工作可靠,驱动输入数目要尽量少,以减少能量消耗,实现节能减排。这一要求,恰好可利用并发挥常规机械制造的并联机构动平台能产生空间复杂复合运动的优势,但输入的数目要尽量少,以保证机构结构简单,并使生产、制造、维修成本较低!为此,本文定义这些装备的机构为第Ⅱ类并联机构,即“少维输入-多维含非独立期望运动输出并联机构”,简称“少输入-多维输出并联机构”。目前,有关该类并联机构的拓扑结构设计理论与方法,国内外未见公开报道。
2.2 并联机构的输出运动类型、数目与驱动输入的关系
设并联机构的驱动输入数为W,自由度数为dof,输出平台的输出方位的维数为Nout(包括独立和非独立元素),根据W与dof的关系,有3种情况:
第一种为确定输入,即:W=dof=Nout,第Ⅰ类“多维输入与等维精确运动输出并联机构”,即属于此,实际应用中最为常见,已广泛应用。
第二种为冗余驱动输入,即:W >dof,机器人或装备采用冗余驱动有利于改善机构性能、避免奇异点,但冗余驱动也使得系统结构、动力学计算和控制更复杂或困难[9]。
第三种为欠驱动输入,即:W <dof,机器人或装备可通过与其他关节的耦合获得动作,从而使欠驱动机器人具有质量小、成本低、能耗低等优点[10]。
目前,几乎所有的文献都主要研究W,dof二者之间的关系,而没有考虑W,dof与Nout的关系。
而本文要阐述的是:第Ⅱ类机构在考虑W,dof,Nout三者满足W=dof<Nout前提下的拓扑结构设计及其应用,显然,它既不属于冗余驱动输入,也不属于欠驱动输入,而是属于确定输入情况下的拓展问题,也就是说,要用较少的dof输入实现多维(dof+Δ)期望运动输出,这里,Nout=dof+Δ,2≤Nout≤6,一般取1≤W=dof≤5,而Δ =1 ~5,即充分利用非独立的输出元素进行工作,这样,由于驱动输入数减少,机器的结构大为简化,机器工作更可靠,制造、使用与维修也更容易,从而达到节能降耗的目的,作者提出并已工业试用的单输入三维并联振动筛即是一个较好的证明[11]。
需要说明的是:(1)本文所指的“少输入”,是指并联机构自由度为dof、但其输出平台可以产生(dof+Δ)维运动输出(含非独立量);而并联机构学术界习惯称谓的“少自由度机构”是相对于6自由度机构而言的,一般是指2~5自由度输入而产生相应2~5等维输出的并联机构;(2)本文所指的第Ⅱ类“少输入-多维输出并联机构”,也绝非指在并联机器内部通过额外增加“机械传动路线”,将一个输入分成若干多个传动输出,而是指一个并联机构本身具有dof维输入和(dof+Δ)维期望运动输出,且2≤dof+Δ≤6,其中dof=1~5,Δ =1~5。因此,即使是1-dof并联机构,也可生产2~6维运动输出,这里的运动输出是指输出的类型及其数目,且包含非独立输出运动在内。
3 少输入三维并联装备的研究与应用
3.1 单输入三维并联振动筛的研究与设计
笔者自2006年首次提出并联振动筛的概念以来,研究了一、二自由度输入的三维并联振动筛[11-14],如图3(a)、图3(b)、图3(c)所示,分别为单输入三维并联振动筛的机构简图、原理性样机以及实际用于硫磺筛分的装置图,当曲柄1输入时,筛箱产生沿z轴的移动、绕x轴及绕构件2轴线的转动,这3个运动量使筛箱内的物料产生了剧烈的筛分运动,但其中,仅有一个为独立运动,另外两个为其伴随运动。该装置因设计构思新颖、工作原理巧妙,所以运行平稳、噪声低。大量的筛分实验表明,三维并联振动筛的筛分效率、透筛率分别比直线振动筛提高约 15% ~20%,而功耗减少35%[14],已用于橡胶制品的硫磺粉筛分工艺。
3.2 单输入三维转动肩关节康复训练机的概念设计
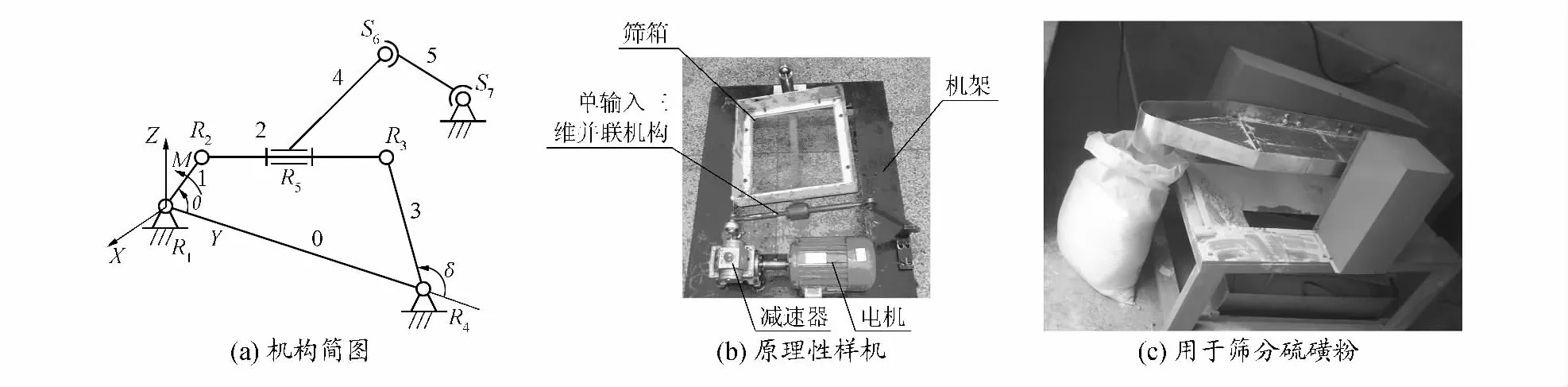
图3 单输入三维并联振动筛
笔者近期已提出了若干少输入-多输出并联机构,包括单输入三转动输出并联机构,如图4所示。其中,图4(a)所示机构[15]的3条支链为RSS、S、RS,图4(b)所示机构[16]的 3 条支链为RRS、S、SS。当曲柄1转动时,这两种机构的动平台3均能产生绕球副S31的3个转动角度,当机构参数改变时,这3个转动角度的大小可发生相应变化,也可使某个转角固定不变或为零。
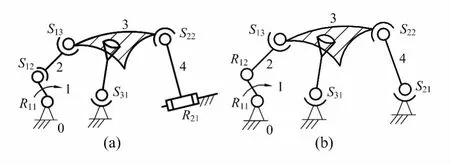
图4 两种单输入三转动输出并联机构
这两种结构精巧简单的单输入三转动输出并联机构,均可作为肩关节康复训练的候选机型,其中,基于图4(b)所示机构的肩关节康复训练机的设计方案为:把机构的动平台3与上臂绑定,静平台绑定在人体肩膀上部,安装示意如图5(a)所示。当曲柄1转动时,上臂能产生绕肩关节(球副S0)的3个转角α,β,γ;针对康复的不同阶段,可通过机构参数的设置与优化,获得上臂所需的输出转动数目和转角大小。进一步对该机构进行初步的位置分析,其上臂的3个输出转角变化如图5(b)所示。
4 研究的意义和前景
提出少输入-多维期望运动输出并联机构的重要概念,对设计结构简单、制造方便、质量小、运行成本低的新机器,具有较好的指导意义,可满足产业结构转型升级及新兴产业发展所需机械装备的需求;不仅有望成为并联机构研究的一个重要方向,而且拓展了并联机构的工程应用领域,在目前产业结构转型升级、培育包括民生产业在内的战略性新兴产业的大背景下,为研发新型节能型绿色工业装备或民生科技装备提供技术基础,具有十分重要的现实意义[17],期望引起并联机构学术界和产业界的注意和兴趣。
5 结束语
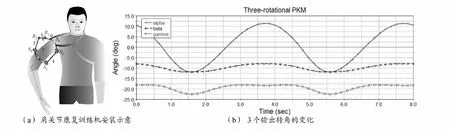
图5 肩关节康复训练机的安装示意及其3个输出转角变化
基于广泛的产业应用背景、发展需求以及笔者研究少输入三维并联运动振动筛的工作基础,提出少维输入-多维运动输出并联机构的重要概念,该类机构可望成为并联机构研究的一个重要研究方向,并拓展并联机构的设计理论与应用,对服务于产业发展的装备设计,具有重要理论意义和实用价值。该类机构的提出,涉及并联机构学的一个理论问题,即并联机构的输出运动类型、数目与驱动输入的关系问题,而该问题国内外未见到公开报道,值得并联机构学术界去探索和研究。
[1] 罗红萍.复摆颚式破碎机破碎腔有效破碎空间的研究[J].矿山机械,2010,38(5):73-77.
[2] 宋书中,周祖德.振动筛分机械发展概述及新型振动筛研究初探[J].矿山机械,2006,34(4):73-74.
[3] 杨廷力,刘安心,罗玉峰,等.机器人机构拓扑结构设计[M].北京:科学出版社,2012.
[4] 国家自然科学基金委员会工程与材料科学部.机械工程学科发展战略报告(2011-2020)[M].北京:科学出版社,2010.
[5] 黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[6] Huang T ,Wang P F,Zhao X M,et al.Design of a 4-DOF hybrid PKM module for large structural component assembly[J].CIRP Annals-Manufacturing Technology,2010,59(1):159-162.
[7] 高峰,杨加伦,葛巧德.并联机器人型综合的GF集理论[M].北京:科学出版社,2011.
[8] J Michael McCarthy.21st Century Kinematics[M].[S.l.]:Springer,2012:13-48.
[9] 卿建喜,李剑锋,方斌.冗余驱动Tricept并联机构的驱动优化[J].机械工程学报,2010,46(5):8-14.
[10] 陈炜,余跃庆,张绪平.欠驱动机器人研究综述[J].机械设计与研究,2005,21(4):22-26.
[11] Shen H P,Zhang J T,Li J,et al.A Novel Vibration Sieve Based on the Parallel Mechanism[C]//Proceedings of 2009 IEEE 10th International Conference on Computer-aided Industrial Design and Conceptual Design,Nov.26-29,2009,Wen Zhou.Beijing:IEEE Beijing Section,2009:2328-2332.
[12] 沈惠平,杨廷力.用于并联运动装备的二自由度空间并联机构:中国,ZL2006100881264[P].2006-11-29.
[13] Shen Huiping,Xue Changyu,Zhang Jiantao,et al.A Novel PKMBased Vibrating Sifter and Its Screening Efficiency Experimental Study[C/CD] //Proceedings of 13th World Congress in Mechanism and Machine Science,June19-25,2011,UCEA-Universidad de Guanajuato ,México.[S.l.]:IFToMM,2011.
[14] 王新翔.非平面筛面并联振动筛的筛分实验研究[D].常州:常州大学,2012.
[15] 沈惠平,余同柱,黄涛,等.一种单自由度三维运动机构:中国,201210307595.6[P].2012-12-05.
[16] 沈惠平,余同柱,尹洪波,等.一种单自由度三维运动装置:中国,201210307592.2[P].2012-12-21.
[17] 中华人民共和国工信部.高端装备制造业“十二五”发展规划[EB/OL].[2013-04-15].http://wenku.baidu.com/view/71cd63100b4e767f5acfce82.html.
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20 06:10:56
环球时报(2022-05-26)2022-05-26 17:22:31
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
小哥白尼(趣味科学)(2020年6期)2020-05-22 06:43:14
现代机械(2018年1期)2018-04-17 07:29:34
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
煤炭学报(2015年10期)2015-12-21 01:56:10
河南科技(2014年4期)2014-02-27 14:07:17
