
家用护理机器人产品分析
2013-10-29 07:43郭丽娟许晓云王焱
机器人技术与应用 2013年3期
郭丽娟 许晓云 王焱
(1 河北工业大学,天津,300401; 2 东芝电梯(中国)有限公司北京分公司,北京,100028)
1 功能归纳
根据GB 8223—87,功能是指对象能够满足某种需求的一种属性。任何产品都具有使用价值——功能。产品的功能具体表现为品牌、性能、质量和作用。对于用户来说,用户购买的不是产品本身,而是其可提供的功能;对于企业而言,生产的亦是产品的功能。一般产品的功能按需求性质分为使用功能和精神功能;按功能的重要性分为主要功能和附属功能;按需求分为必要功能和不必要功能;按需求满意度分为不足功能和过剩功能及适度功能;按照功能相互关系分为上位功能和下位功能及同位功能。
综合这些功能分类方法和大量的文献阅读以及市场调研,笔者对现有家用护理机器人的所有功能进行了归纳,如表1所示。
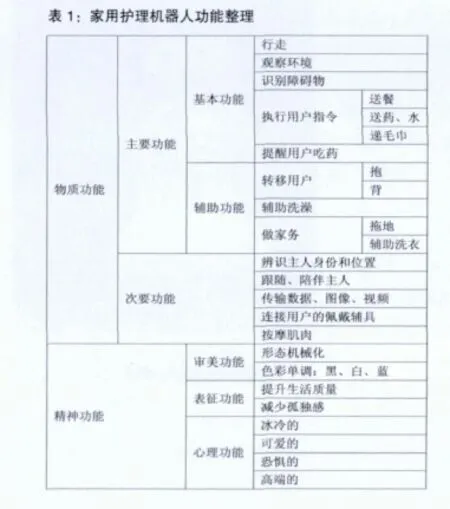
表1中列出的各个固有功能几乎涵盖了公开亮相的所有家用护理机器人,这些功能运用现代机器人技术是可以实现的。目前护理机器人的使用价值主要集中于物质功能的实现,对精神功能关注的很少。例如机器人可以仿人类行走,观察环境、识别障碍物、跟随陪伴用户,可以帮助用户进行简单的家务劳动——拖地、将脏衣服扔进洗衣机,提供有限的护理服务——端水、端药、提醒吃药、帮助用户洗澡,还可以传输数据、辨识主人身份等。随着用户潜在需求的增多和机器人技术的发展,机器人提供的功能也会逐渐多样。
2 原理分析
家用护理机器人是在工业机器人的技术上发展起来的,包括执行系统、驱动系统、控制系统、感知系统、决策系统及软件部分、人机交互系统六大部分。工业机器人的技术为护理机器人的功能实现提供了可能性。表1中功能涉及的技术原理基本包括下面几种:
独立行走、观察环境、识别障碍物并聪明地绕开障碍物,这一系列动作是机器人为人类服务所必须具备的能力。这其中的实现原理主要是智能行走、自适应控制与协调、多传感器信息融合等技术的应用。机器人所处的环境存在着很多非线性和不确定因素,例如未知的系统参数、未知的环境因素影响等。对于家庭这种动态非结构化环境,一般的反馈技术不能满足功能要求,采用变参数和自适应控制技术可以自动补偿上述非结构化环境,改善护理机器人的性能。
用户发出送餐、送水、送毛巾、拖地等指令后,护理机器人通过听觉传感器对获得的信息进行必要的分析和处理,提取出有用信息,经过运算做出相应的动作反馈,进而结合其他多传感器完成相应的任务。例如,当机器人接到用户指令后,在去拿物品的过程通过接近觉传感器、避障传感器避开各种障碍物;在碰触到食物、水、药品、毛巾等物体后,机器人外部的触觉传感器开始启动工作,物体的接触信息、压力信息和分布压力信息甚至滑觉信息被用来进行触觉识别和触觉控制;在抓取物品这个动作中,装在机器人手指关节的力传感器决定了夹持物体的受力情况,这个受力影响着产品的安全和稳定。这些传感器不是单独执行任务的,因为有时候单一信号不准确、不可靠,它们可以像人类一样,将多种感觉获得的信息融合起来,识别动态的环境和物体,即多传感器融合技术。
护理机器人可以抱起、背起用户主要取决于机械构件的设计,例如自由度数量、重心位置、产品的稳定性和安全性因素。
护理机器人可以识别用户,是因为它拥有图像输入、图像存储、图像处理与识别的视觉系统。
护理机器人提供用户多样的护理服务,必须具备自主导航技术。机器人通过多传感器感知环境信息和自身状态信息, 实时识别路标和其他物体,在有障或无障的环境中都能有效、可靠地到达目标位置。
除了上述几种典型的机器人技术,还有很多技术可以用于护理机器人的研究与开发。随着科学技术的发展,更多新的、低成本的技术将应用于护理机器人。
3 外观结构造型分析
结构作为产品外部形式的承担者和内在功能的传达者,联系着产品内部诸多要素。但是外观结构不承担核心功能,即外部结构的变换不直接影响核心功能。以下4幅图片展示的都是护理机器人。

图1 PR2机器人
3.1 家用护理机器人外观结构
图1所示PR2机器人是佐治亚理工学院人为因素与老化实验室设计的。PR2有两条手臂,每条手臂七个关节,手臂末端是一个可以张合的钳子。PR2依靠底部的四个轮子移动。在PR2的头部、胸部、肘部、钳子上安装有高分辨率摄像头、激光测距仪、惯性测量单元、触觉传感器等设备。 在PR2的底部有两台8核的电脑作为机器人各硬件的控制和通信中枢,两台电脑安装有Ubuntu和ROS。PR2整体造型厚重、稳定性强,与人建立了良好交互关系。到目前为止,PR2能够自己开门,找到插头并给自己充电,能打开冰箱取出啤酒,能打简单的台球等等。

图2 “AR”机器人

图3 陪伴机器人
图2所示机器人是日本东京大学和丰田汽车公司等机构联合开 发 的“AR”机器人,这是一种家务帮手机器 人,“AR”是“Assistant Robot”的缩写。该机器人拥有与人类接近的身高——155cm,重130kg,她的头部装有5台照相机以确定家具的位置,通过底部的滚轮行走。AR可以根据衣物的褶皱将衣物分开并投入洗衣机,开启洗衣机上的启动洗衣按 钮。AR还可以送餐、拖地。AR在收到用户发出的指令后通过装载的计算机自行完成动作任务,不需要人类的控制。主人只要在出门前对机器人发出指令,机器人就可以独自干活了。研究人员表示将对AR机器人加以完善,并尽早投入市场,以帮助家庭主妇和老龄家庭减轻家务负担。

图4 个人卫生护理机器人
图3所示机器人是东芝公司制造的陪伴机器人,这款机器人拥有可爱的外表、饱满的体态,让人爱不释手。它的主要功能就是陪伴用户——用户动,机器人动;用户静,机器人静。除了陪伴,机器人可以识别周围环境是否危险,进而提醒用户,同时机器人自身会启动呼救信号。
图4所示机器人为洛阳圣瑞机电技术有限公司联合河南高校及洛阳浮法玻璃集团等单位共同研制的个人卫生护理机器人。这台机器人是国家863计划服务机器人重点项目。该机器人采用模块化设计方法,其小车部分可以拆卸下来放在浴缸中,老年人等特殊群体可以以多种姿势洗澡。高度自动化的机器人节水、节能、减小使用空间,还可以回收脏物。
谷歌公司也致力于机器人的开发与研制,其中具有代表性的是一种云服务机器人,该机器人依托了云服务技术,可以实现复杂的智能运算和数据查询等功能,是高科技的绝对体现,但是该机器人没有进行很好的外观设计,呈现在人们面前的是各种机械结构和操作界面。裸露的机械化同时带来了科技的冰凉感和冷漠感,让人们心生距离与畏惧。
上述5种机器人均是护理方面的智能机器人。这些机器人从外观构造和形状上可以分为仿人型和轮椅型。仿人型护理机器人一般具有人的形态,包括头部、四肢、躯干。有些机器人具有明显的人的形态;而有些机器人不具备人类所有外形特征,但是也有头部、躯干和足部。有的机器人是以轮椅为原型,结合浴缸为功能障碍者提供洗发、洗澡系列服务。虽然它也叫做机器人,但是不具备人的姿态,由于采用了机器人等高科技技术,并且能够自动地完成预设任务,所以将它称之为个人卫生护理机器人。
3.2 家用护理机器人色彩
在护理服务领域,目前各研究机构和众公司研发出来的服务机器人大体以白色、蓝色、金属色为主。色彩学表示,色彩具有象征功能、暗示功能,可以表示产品的属性、形象与环境的关系,它影响着产品的营销和用户的使用过程。家用护理机器人的受众对象基本都是有功能障碍的人群,他们的心理承受能力相对弱一些,对色彩的敏感程度也相对强一些。所以生活环境中的机器人没有水下机器人的黄色、点焊机器人的橙色、军用机器人的迷彩色。白色的机器人给人一种高科技感,在家庭中可以与周围的家电融为一体;蓝色的机器人给人一种平静感,可以潜移默化地影响使用者的心情;而金属色的机器人给用户带来一种机械化式的冰冷感。每种色彩都有其要传达的感情信息,所以面对多类功能障碍人群,可以多一些颜色或是混合颜色的尝试,不再让护理机器人高高在上,通过宜人的色彩让其在某种程度上融入人们的生活,让人们在使用过程中感到安全、放心、亲切。
小结
文章从工业的产品设计角度,以功能、原理、造型色彩三方面为出发点,对现在具有代表性的5款护理机器人进行了详细的产品分析。文章为护理机器人的深入设计提供了直观的了解和概括的总结,丰富了初学护理机器人相关学者的基础知识。
[1]肖雄军,蔡自兴.服务机器人的发展 [J].自动化博览,2004,21(6):10-13.
[2]冯子娇.简述未来家用机器人的发展方向 [J].科技资讯,2012(9):245.
[3]俆方,张希伟,杜振军.我国家庭服务机器人产业发展现状调研报告 [J].机器人技术与应用,2009(2):14-19.
[4]王田苗,陈殿生,殷兰兰.服务机器人辅助老年人生活的新模式与必要性[J].机器人技术与应用,2010(1):1-5.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
商用汽车(2016年11期)2016-12-19
商用汽车(2016年6期)2016-06-29
商用汽车(2016年4期)2016-05-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
- 机器人技术与应用的其它文章
- 小i机器人——用人机交互技术打造智能生活