
动态松弛方法中虚密度与时间步长的选择
2013-10-24 22:24:44陈新民刘传奇薛世峰
中国石油大学学报(自然科学版) 2013年1期
陈新民,刘传奇,薛世峰
(1.中国石油大学储运与建筑工程学院,山东青岛 266580;2.胜利油田滨南采油厂,山东滨州 256600)
动态松弛法是将线性或非线性静力问题转化为动力问题,通过设置阻尼消耗能量,当位移收敛到平衡位置(即势能最小位置)时,迭代结束的显示求解方法[1]。Otter[2]在分析预应力混凝土核容器外壳时首次提出该方法;Cassell等[3]引入虚质量的概念;Underwood[4]对如何设定最有效的阻尼矩阵、质量矩阵进行了研究;David等[5]采用动态松弛法进行非线性分析,研究了超弹性结构;Michael[6]采用此方法进行了受拉结构的找形分析;Li等[7]应用动态松弛法求解可变形离散元中的节点运动方程;Rezaiee等[8]对虚质量与阻尼的具体算法进行了系统论述;李士军等[9]对Rayleigh阻尼参数取值进行了分析。当求解包含应力集中或其他局部网格加密的问题时,可通过设置虚密度,提高收敛速度[10]。对于虚密度影响收敛时步与计算结果的问题,相关文献研究较少。刘波等[11]从应力波传播角度讨论了不同单元如何设定密度与步长,但未能给出虚密度影响下时步设定的具体表达式。笔者以常应变三角形单元为例,探讨虚密度与时步的设定问题。
1 密度对收敛过程与结果的影响
从节点运动角度,可变形离散单元保持收敛的必要条件是单元Jacobi行列式恒大于零。如图1所示,在一个时步内,若节点k从原位置移动到k1位置,网格未出现畸变,保证在平衡位置附近振动,若移动到k2(Jacobi行列式为零),k3(Jacobi行列式小于零)位置,则网格畸变,引起发散。
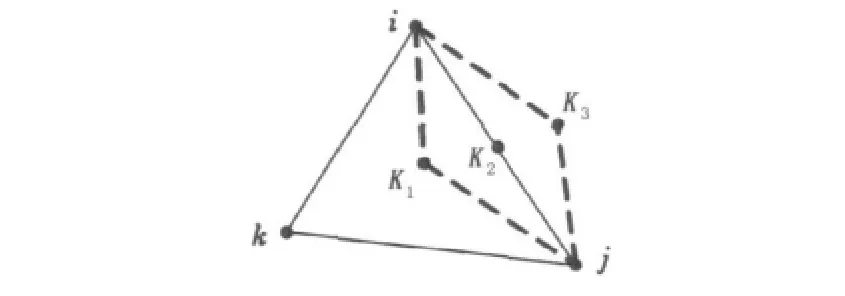
图1 单元节点位置示意图Fig.1 Schematic diagram of nodes position
遍历所有网格,初始状态顶点到对边最小距离记为Hmin,则计算收敛的必要条件是:Δt时间内,内含集中质量的节点位移小于Hmin。有

式中,Fext为k节点所受外力,N;mk为k节点集中质量(在三角形常应变单元中,mk=ρA/3),kg;A为单元面积,m2;ρ为材料密度,kg/m3。
将mk带入式(1)中得

由式(2)可以明显看出,若单元密度增加,则收敛时间步长可相应增加。
从信息传递角度,迭代收敛的必要条件是当前计算速度必须大于信息传播的最大速度[11],由此推导的最大收敛时间步长亦正比于密度的0.5次方。
针对密度变化影响最终平衡位置改变的问题,考虑单自由度含阻尼强迫振动,其运动方程为

其中

式中,ε为阻尼比;p为固有频率,rad/s;m为节点质量,kg;c为阻尼系数,N·s/m;k为弹簧刚度,N/m;F为所受外力,N。
根据杜哈梅积分公式[12],初始条件为零的情况下,方程(3)的全解为

利用分部积分得到

若按式(2)设定步长,将t=nΔt代入式(5),则有
由式(6)可以看出,x(n)与密度无关,即按最大收敛时步进行迭代,收敛速度相同。因而,加快收敛的核心是设定虚密度和步长,使不同单元拥有相同的收敛时步,并且步长尽可能接近最大收敛时步。
2 虚密度与步长设定方法
单元节点运动受弹簧作用力影响,偏离平衡位置位移越大,所受弹簧力越大。弹簧力影响节点加速度,导致节点速度发生变化,单个时步的位移受到影响,反过来,影响下一时步的弹簧力。各因素影响关系如图2所示。

图2 迭代参数相互影响示意图Fig.2 Schematic diagram of iterative parameters mutual influence
图中,aij、vij、sij分别表示第 i步 j节点的加速度、速度、位移。假设j节点的最大收敛时间步长为Δtj,则有

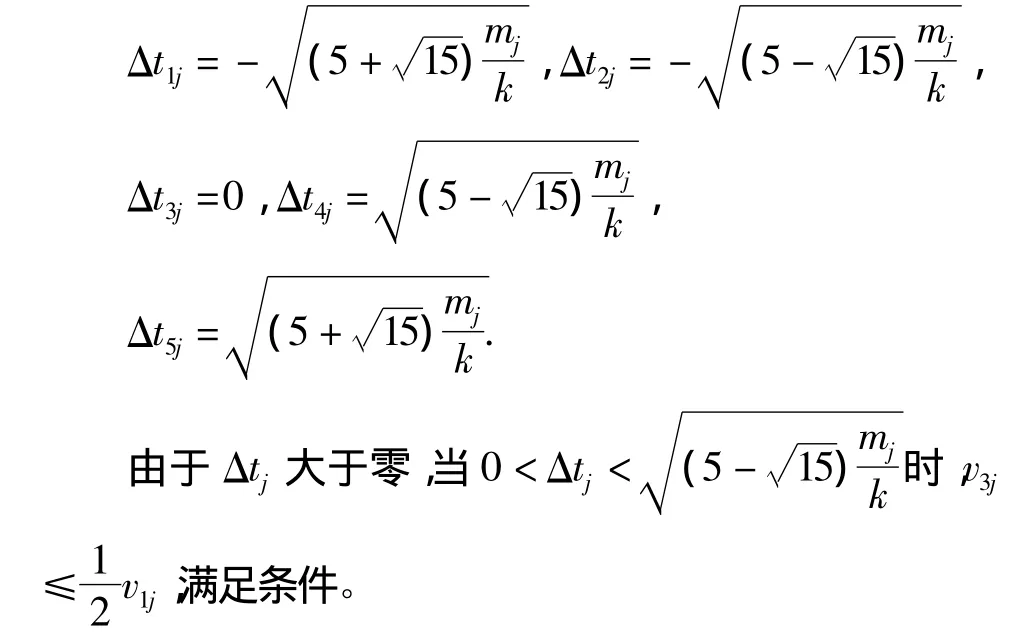
采用三次迭代后,节点速度至少衰减为初速度一半的标准,确定时间步长,即:v3j≤0.5v1j,带入各自表达式,取等号进行方程运算,则有

此方程为一元五次方程,共有5个不同的解,分别为
整个过程中未考虑阻尼影响,计算最大收敛时步需添加阻尼影响系数c,则j节点最大收敛时步为

式中,ρj为所设虚密度,kg/m3;Aj为单元面积,m2;k为弹簧刚度,N/m;c0为比例系数。
系统的收敛时步为ΔT=min{Δtj},在实际应用中,首先计算最小单元面积,记为Amin,假定其密度,将单元j的密度设定为

此时,各单元收敛时步相同,再按照

设定步长,其中c0通过反复试算,取为0.45。
3 编程验证
基于可变形离散单元法进行编程验证。以平面受拉薄板为例,验证理论推导结论以及虚密度设定方案的有效性。计算模型如图3所示,由于薄板受集中力作用,采用不均匀网格(图3(b))。原来连续的节点分裂为夹有弹簧的两个角点,图中每个网格线间均有一对弹簧,方向分别为界面法向与切向。
为减弱由弹簧变形引起的位移不连续,将弹簧刚度设为单元弹性模量的50倍[7],阻尼采用局部阻尼系数0.8[13],弹性模量为20 GPa,泊松比为 0.2,密度为1.8×103kg/m3,弹簧刚度为1 000 GPa,阻尼系数为0.8。
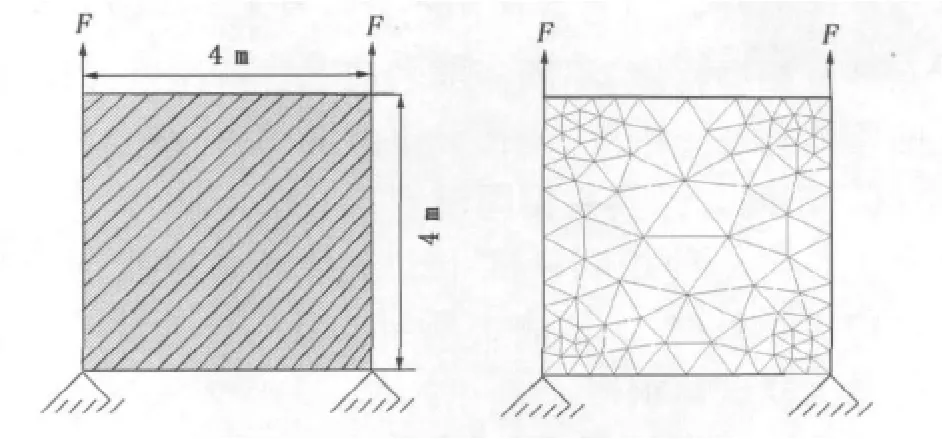
图3 计算模型示意图Fig.3 Schematic diagram of calculation model
采用C++语言编写可变形离散元程序。计算过程为:单元与单元之间通过弹簧相连,根据单元节点的相对位移计算弹簧作用力,采用高斯定理和Wilkins的大变形[14]有限差分法计算单元变形力,采用局部无黏性阻尼计算阻尼力,按照动态松弛法不平衡力—加速度—速度—位移—不平衡力的顺序进行迭代,当不平衡力数值小于预定值时,迭代完成。需要指出,速度与位移的求解是按照中心差分格式进行的。
图4为可变形离散元法和有限元软件ANSYS的计算结果,Y向最大位移分别为4.6×10-7m和4.7×10-7m,两种结果的相对误差为2.1%。通过改变单元密度进行计算,结果并未发生变化。
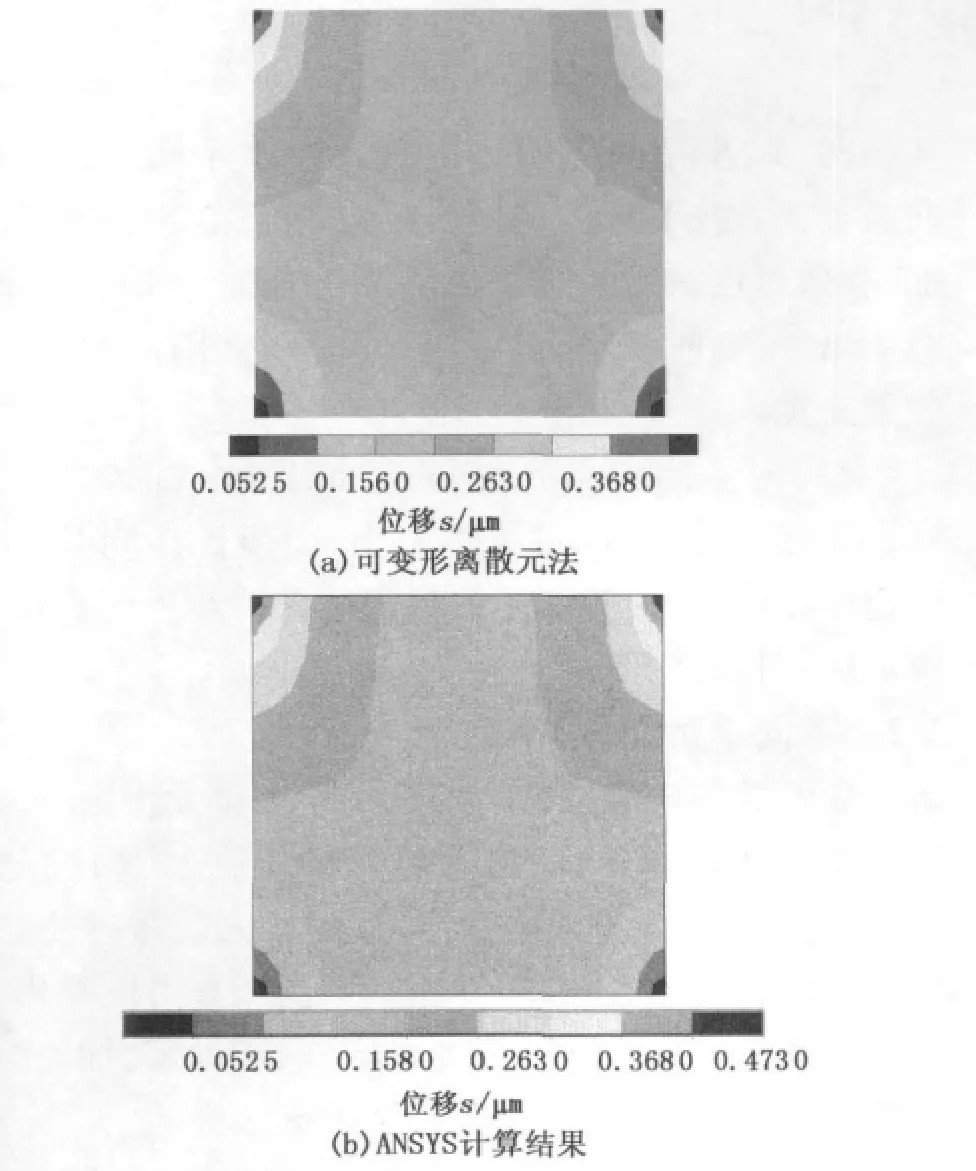
图4 可变形离散元法和ANSYS软件的计算结果Fig.4 Computed result of deformable discrete element method and ANSYS software
选取顶部左节点的内力作为参照,分别对各单元具有相同密度、不同密度的情况进行讨论,以验证推导结论及虚密度、步长设定方案的有效性。
3.1 不同单元具有相同密度
对比3种相同密度下的最大收敛时步与公式(11)的估计时步,如表1所示。其中最大收敛时步通过反复试算求得。
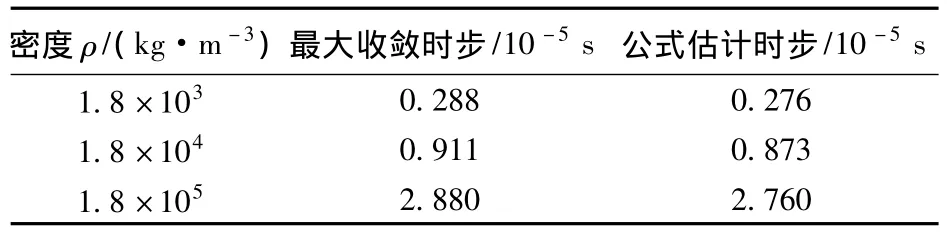
表1 收敛时步与估计时步对照Table 1 Comparison of convergence and estimated time step
(1)密度相同(1.8×103kg/m3)、时步不同时,收敛曲线如图5(a)所示。由图5(a)可以看出,时步增加,收敛速度加快,这是由于密度不变,最大收敛时步不变,若时步增加,则时步比增加,增大了收敛速度。
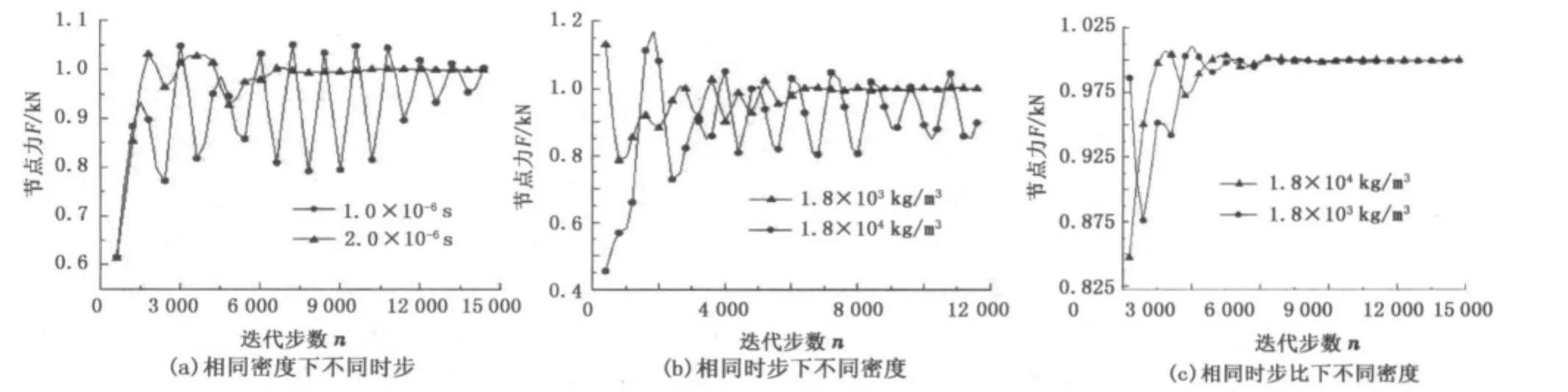
图5 相同密度下不同时步对照收敛曲线Fig.5 Comparison of convergence curve in different time step under same density
(2)时步相同(2.0×10-6s),密度不同时,收敛曲线如图5(b)所示。由图5(b)可以看出,密度增加,收敛速度减缓。这是由于密度增加,则最大收敛时步增加,而时步恒定,则时步比减小,因而放缓了收敛速度。
(3)时步比均为1,密度不同时,收敛曲线如图5(c)所示。由图5(c)可以看出,时步比相同时,迭代速度相差不大,验证了按最大收敛时步进行迭代,收敛速度相同的结论。
3.2 不同单元具有不同密度
虚密度加速收敛的核心在于不同单元设定不同的密度,按照公式(10)进行密度设定,公式(11)进行时步设定,对比真实密度下按照最大收敛时步进行迭代的收敛曲线,如图6所示。由图6可以看出,按照本文所述方法进行密度设定,时步设定,加速收敛效果十分明显,验证了此方法的有效性。

图6 真实密度与虚密度对照收敛曲线Fig.6 Comparison of convergence curve in actual density and fictitious density
4 结论
(1)虚密度增大,可增大收敛时步。
(2)收敛速度与时步比有关,时步比越大,收敛速度越快。
(3)虚密度加速收敛的核心在于不同单元设置不同密度,使得不同单元拥有相同的最大收敛时步,按照所提出的密度、时步设定方案进行参数设定,加速收敛效果很明显。
[1] TONG P.An adaptive dynamic relaxation method for static problems[J].Computational Mechanics,1986(1):127-140.
[2] OTTER J R H.Computations for prestressed concrete reactor pressure vessels using dynamic relaxation[J].Nuclear Structural Engineering,1965,1(1):61-75.
[3] CASSELL A C,KINSEY P J,SEFTON D J.Cylindrical shell analysis by dynamic relaxation[J].ICE Proceedings,1968,39(1):75-84.
[4] UNDERWOOD P.Dynamic relaxation[R].Lockheed Report LMSC-D678265,1979.
[5] DAVID R Oakley,NORMAN F Knight Jr.Adaptive dynamic relaxation algorithm for non-linear hyperelastic structures(Ⅰ):formulation[J].Computer Methods in Applied Mechanics and Engineering,1995,126(1/2):67-89.
[6] MICHAEL R Barnes.Form finding and analysis of tension structures by dynamic relaxation[J].International Journal of Space Structures,1999,14(2):89-104.
[7] LI Shi-hai,LIU Xiao-yu,LIU Tian-ping,et al.Continuum-based discrete element method and its applications[C].Beijing:UK-China Summer School/International Symposium on DEM,2008:24-30.
[8] REZAIEE-PAJAND M,ALAMATIAN J.The dynamic relaxation method using new formulation for fictitious mass and damping[J].Structural Engineering and Mechanics,2010,34(1):109-133.
[9] 李士军,马大为,朱孙科.动态松弛方法中Rayleigh阻尼参数取值分析[J].计算力学学报,2010,27(1):169-172.LI Shi-jun,MA Da-wei,ZHU Sun-ke.Analysis of rayleigh danp parameters in dynamic relaxation method[J].Chinese Journal of Computational Mechanics,2010,27(1):169-172.
[10] 王泳嘉,邢纪波.离散单元法及其在岩土力学中的应用[M].沈阳:东北工学院出版社,1991:46-47.
[11] 刘波,韩彦辉.FLAC原理、实例与应用指南[M].北京:人民交通出版社,2005:11-12.
[12] 仇伟德.机械振动[M].东营:石油大学出版社,2001:45-46.
[13] PAPADRAKAKIS M.A method for the automatic evaluation of the dynamic relaxation parameters[J].Computer Methods in Applied Mechanics and Engineering,1981,25(1):35-48.
[14] LANRU Jing,SSTEPHANSSON O.Fundamentals of discrete element methods for rock engineering:theory and applications[M].Amsterdam:Elsevier,2007.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
新高考·高一物理(2016年10期)2017-07-07 12:17:11
数学物理学报(2016年6期)2016-04-16 04:41:06
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年2期)2014-04-04 09:04:00
