车轮位置显示与辅助泊车系统的设计*
2013-10-17 01:03周忠友罗春潇
湖州职业技术学院学报 2013年3期
周忠友 ,余 海 ,罗春潇
(湖州职业技术学院 机电工程分院,浙江 湖州 313000)
汽车工业已有百年历史,在崭新的21世纪,随着计算机、通信、传感器技术的发展,新型汽车日益趋向智能化,汽车的智能化成为汽车工业发展的热点之一,其智能化主要包括智能化的信息系统,智能化的安全系统,智能化的节能系统,智能化的辅助驾驶系统。
本设计的研究重点就是车轮位置的即时显示。通过显示屏或者指示灯直接把车轮的即时位置显示给驾驶员,可以在驾驶过程中或者停车过程中给驾驶员提供必要的信息,主要是在停车过程中给驾驶员提供车轮位置的即时信息,以便于驾驶员能够摆正车轮位置,从而减少因车轮不正对车辆行驶和结构造成的危害。
1 国内外研究及应用现状
现阶段国内外的研究主要集中在自动泊车。从21世纪90年代起,就有国外学者对汽车自动泊车的问题进行研究。该系统包括环境数据采集系统、中央处理器、车辆策略控制系统。环境数据采集系统包括图像采集系统和车载距离探测系统,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器;中央处理器可将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数作出自动泊车策略,并将其转换成电信号;车辆策略控制系统接受电信号后,依据指令作出汽车的行驶如角度、方向及动力支援方面的操控[1](P14)。2003年,丰田公司首先在其普锐斯混合动力车型上配置了智能泊车系统;2007年,又在新款LS460轿车上使用了自动泊车系统;2006年,法国的汽车零部件供应商法雷奥(Valeo)公司发布了其第一代汽车泊车系统,并已在大众途安系列车型中运用[2](P5)。
国内汽车工业起步较晚,在自动泊车系统的应用上也落后于世界先进国家。比亚迪股份有限公司于2003年12月向国家知识产权局提出了自动泊车系统的实用新型专利的申请,并在2005年获得授权,不过目前未得到更多关于在此技术上具体车型的应用[2](P6)。
但是,由于汽车自动泊车系统实现的苛刻条件,驾驶员选择的路边车位的长度一定要大于汽车长度1.5米以上,自动泊车系统才能自动检测出车位的存在,如果车位长度过短,则自动泊车系统不能检测出车位的存在;同时,自动泊车系统是一个复杂的汽车停车辅助系统,虽然智能化很高,但是结构复杂、成本非常高,需要在车辆制造过程中加装,目前只有少数高档轿车上才有出现,普遍程度很低。
2 汽车停车时车轮不正对汽车造成的影响
在这之前,笔者还对不同驾龄的车主进行了问卷调查,调查发现,60%左右的车主是不关心汽车停车时车轮回正问题,并且这些车主的驾龄一般都在3年以上;30%左右的车主是关注停车时车轮位置的情况,而且大部分人都是开车实习阶段,但他们经常要特意探头观察车轮的位置,带来了诸多的麻烦;将近10%的人认为停车车轮摆正是无所谓的,而且有时为了显摆故意将车轮停不正。总而言之,对车轮回正的情况带来的危害大家还是一知半解,不放在心上。那么,汽车停车时车轮不正会对车造成哪些影响呢?
首先,对转向助力系统造成损害。如果你的车是有液压助力转向系统的话,熄火停车前是必须将方向轮打直的,因为方向偏一边,液压油还没有回卸到储油缸,中尺里面的油压和助力系统仍处于高压状态,长时间状态易造成油路密封圈和胶管及接头变形,这种停车习惯会使助力系统漏油而失去助力效果。如果是带电动助力系统,会使系统电阻值增大,起动时电路耗损大。
其次。加剧悬挂的磨损。由于车辆的前悬挂的特殊结构,主销是后倾和内倾的,车轮是外倾的,如果车辆停稳后不回正的话,车轮的位置低于地平面的,但是地平面 是不会变的,相对地悬挂把车身抬起了。所以不回正会使这个力矩始终加在悬挂上,会加剧悬挂的磨损,缩短其使用寿命。
第三,对轮胎造成损害。方向没回正停车,轮胎露在外边容易使轮胎侧壁受伤造成隐患,更严重的会造成内部的钢丝断裂或钢圈变形。
第四,对四轮定位的影响。转向轮定位包括前轮外倾、主销后倾、主销前倾及前束四个参数。(1)当汽车停车时车轮不正,主销后倾、主销内倾,一直受到一个使车轮具有回复到原来中间位置的力矩,以至于破坏转向轮自动回正的作用;(2)当汽车停车时车轮不正,车轮外倾与主销内倾配合破坏,导致转向沉重,轮胎磨损加剧;前轮前束的功用是消除因车轮外倾所造成的不良后果,保证车轮不向外滚动,防止车轮侧滑和减轻轮胎的磨损,当前束和车轮外倾配合不当,车轮向内,外侧滚动偏移量就不会相互抵消,影响车轮每一瞬间的滚动方向偏移,发生侧滑,加剧轮胎磨损。
3 车轮位置显示与辅助泊车系统的工作原理
该系统的基本工作原理(如图1所示)按下电源开关,电源电路就像控制电路供电;然后摆正方向盘的位置,按下复位重置按键,确定初始位置,此时,居于中间的指示灯亮起(绿色),当方向盘不正时,居于中间绿色指示灯熄灭;在驾驶员转动方向盘的同时,信号采集模块(角度传感器模块)通过方向盘的旋转角度,采集方向盘的转角信号(即车轮位置信号),将信号输送给控制模块,控制模块通过运算处理将信号传给显示模块;显示模块将方向盘转角信号处理,在显示屏上以模拟角度信号显示,由于显示屏只能显示一圈内的角度(即360度),当方向盘转角超过一圈时,两侧指示灯就点亮。由于车轮有左转和右转,为了识别方便,特别将左转计数的指示灯和右转计数的指示灯的颜色加以区分(黄色或红色)。
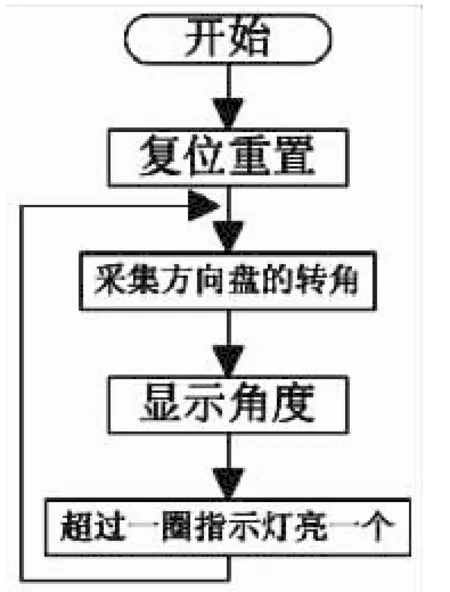
图1 车轮位置显示与辅助泊车原理图

图2 系统模块框图
4 车轮位置显示与辅助泊车系统的总体设计方案
车轮位置显示与辅助泊车总体结构(如图2所示)主要包括控制模块、信号采集模块、电源升压模块、显示模块、按键重置模块等。
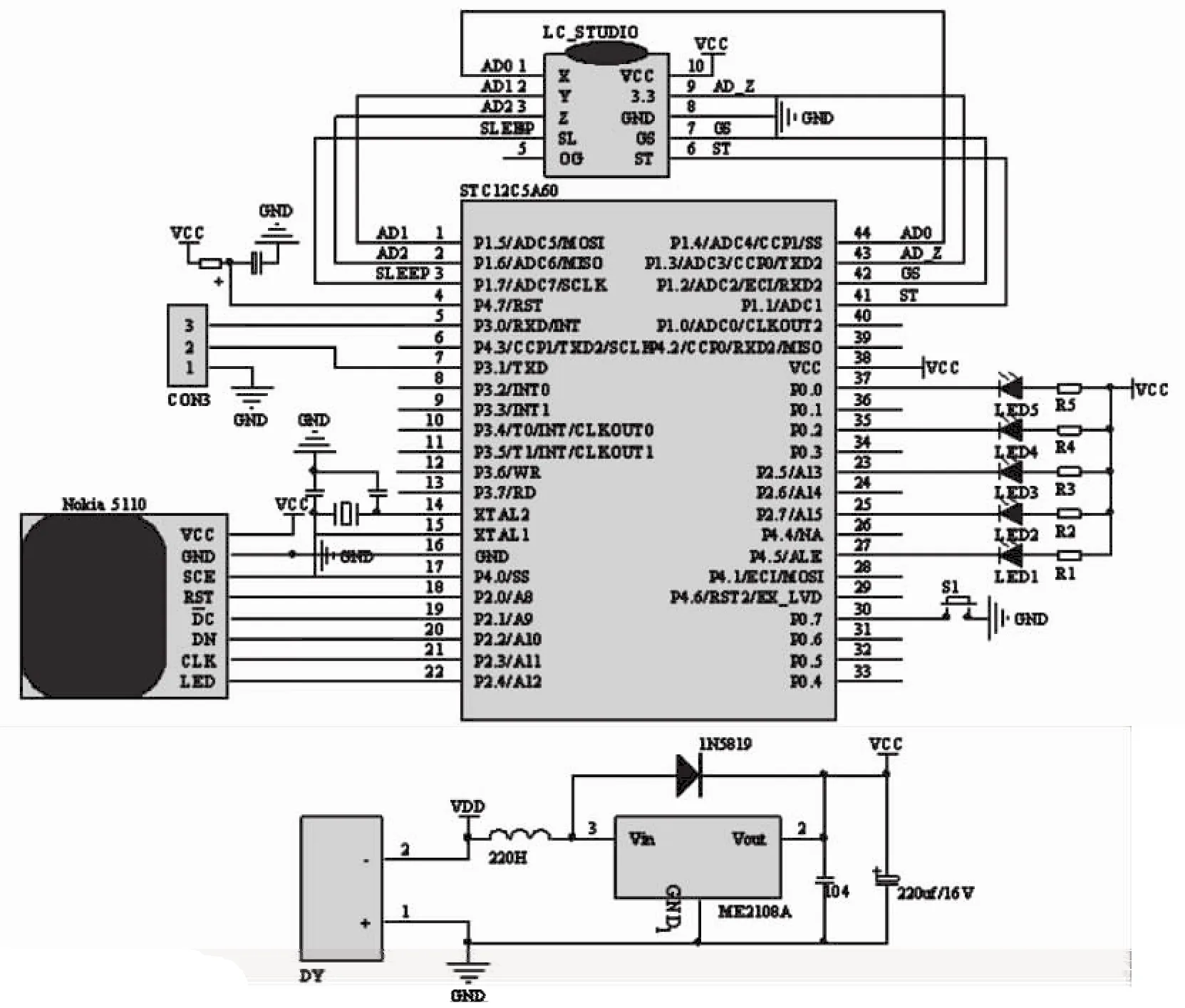
图3 系统电路原理图
4.1 控制模块是以STC12C5A60S2为核心的最小系统板
STC12C5A60S2系列单片机式宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成MAX810专用复位电路,2路PWM,8路高速10位 A/D转换(250K/S,即25万次/秒),针对电机控制,强干扰场合。
4.2 信号采集模块选用
MMA7361角度传感器 倾角传感器 加速度模块
1)板载MMA7361(取代MMA7260)低成本微型电容式加速度传感器;
2)支持5V/3.3V电压输入,板载RT9161,比1117更低的压降,更快的负载相应速度,非常适合高噪声电源环境;
3)量程通过单片机IO选择,也可以电阻选择;
4)常用的引脚已经引出,插针为标准100mil(2.54mm),方便用于点阵板;
5)休眠使能可以通过单片机IO控制;
6)PCB板子双面镀金,尺寸:27.9mm×16.8mm 。
4.3 电源升压模块采用的ME2108A升压芯片组成的电源电路
ME2108系列升压转换器具有以下特点:
1)只需少量的外接元件:仅一只肖特基二极管、一只电感和一只电容;
2)低纹波及及噪声;
3)工作电压范围:0.9V-6.5V;
4)带载能力强:当Vin=3.0V且Vout=5.0V时Iout=400mA;
5)输出电压范围:2.7V-7.0V;
6)输出电压高精度:±2.5%;
7)低启动电压:最高值为0.9V;
8)最大工作功率:180kHz;
9)高效率:典型值85% 。

图4 电源升压模块电路
4.4 显示模块选用NOKIA 5110液晶模块,带蓝色背光
该模块具有以下特点:
1)84x48的点阵LCD,可以显示4行汉字,采用串行接口与主处理器进行通信,接口信号线数量大幅度减少,包括电源和地在内的信号线仅有8条。支持单片机的SPI、MCS51的串口模式0等,传输速率高达4Mbps,可全速写入显示数据,无等待时间;
2)可通过导电胶连接模块与印制版,而不用连接电缆,用模块上的金属钩可将模块固定到印制板上,因而非常便于安装和更换;
3)LCD控制器/驱动器芯片已绑定到LCD晶片上,模块的体积很小;
4)采用低电压供电,正常显示时的工作电流在200μA以下,且具有掉电模式。
5 结 语
通过对停车时车轮位置的判断要求,研究设计了车轮位置显示与辅助泊车系统,可以使驾乘人员实时了解车轮位置,确保停车时车轮的位置是摆正的,从而有效地解决了因为车轮位置不正对汽车造成的损坏和带来的安全隐患;同时该系统还能为汽车准确泊入停车位提供帮助。
[1]李建锋.汽车自动泊车系统的控制策略和算法研究[D].西南交通大学,2010:14.
[2]何 峰.自动泊车系统的研究及实现[D].广东工业大学.2009:6.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车工程(2021年5期)2021-06-09
港口装卸(2020年3期)2020-06-30
军民两用技术与产品(2020年3期)2020-04-07
汽车实用技术(2019年16期)2019-09-11
汽车维护与修理(2015年10期)2015-12-12
汽车维修与保养(2014年12期)2014-04-18
自动化博览(2014年12期)2014-02-28
汽车维护与修理(2014年10期)2014-02-28