基于HSV色彩空间与数学形态学的车牌定位研究
2013-09-25 02:58:44常巧红高满屯
图学学报 2013年4期
常巧红, 高满屯
(西北工业大学机电学院,陕西 西安 710072)
基于HSV色彩空间与数学形态学的车牌定位研究
常巧红, 高满屯
(西北工业大学机电学院,陕西 西安 710072)
车牌识别系统在高速路收费口与住宅小区车库管理中得到越来越多的应用,车牌定位是整个识别系统实现的前提。基于灰度图像的定位方法和基于彩色车牌图像的定位方法,实现效果均不大理想。在充分利用车牌先验信息的基础上,提出基于HSV色彩空间与数学形态学的车牌定位方法。先利用色彩信息对可能包含车牌目标的区域进行过滤,再利用数学形态学技术生成连通区域,判断并生成正确的车牌区域,最后,使用radon变换进行倾斜校正。
车牌定位;HSV色彩空间;数学形态学;radon变换
随着现代交通的发展,对车辆的现代化管理日趋自动化,对车辆自动检测、识别系统的需求日益增加,例如高速路收费口、小区自动停车场管理等。为了适应当今交通发展,需要有智能化的交通管理系统,其中一个重要环节就是基于车辆图像的牌照识别。通常,车牌识别由3个部分组成:车牌定位,字符分割与字符识别。车牌定位是车牌识别的关键环节,并且也是最难解决的问题。
常用的车牌定位方法有基于边缘检测的方法[1-3]、数学形态学定位法[4,5]、基于彩色图像分割的方法[6-9]等。彩色图像分割定位法利用彩色图像比灰度图像能得到更多的视觉信息并对各种光照不敏感等特点,可以准确地定位出车牌的边界,但当车牌区域与附近区域颜色非常相近时,该方法的定位误差会有所增加;基于数学形态学的车牌定位方法计算量小,复杂度低,可降低噪声的干扰,且满足实时定位的要求,但边缘定位粗糙。
本文在充分利用车牌先验信息的基础上,提出基于 HSV色彩空间与数学形态学的车牌定位方法。利用色彩信息对可能包含车牌目标的区域进行过滤,然后利用数学形态学技术生成连通区域,判断并生成正确的车牌区域,最后使用radon变换进行倾斜校正。实验表明,该方法能快速精确的检测出车牌,并进行倾斜校正。
1 色彩空间
我国的车牌按照字符颜色和底色的不同搭配可分为4类:蓝底白字、黄底黑字、黑底白字、白底黑字。其中底色占车牌区域70%左右,故车牌区域颜色特征以底色为主。彩色图像的数据包含亮度信息,也包含颜色信息。为了正确识别颜色,需要建立颜色空间。颜色空间是对彩色的一种描述方法,目前有多种表示数字图像色彩信息的颜色空间模型,常见的有RGB、HSV、CMYK、Lab等。
一般彩色图像常用的RGB三原色模型中两点间的欧氏距离与颜色距离呈非线性关系,不便于进行图像的彩色分割,可以将这个模型转化为HSV模型,使车牌定位工作在 HSV空间中进行[10]。
1.1 HSV色彩空间
HSV色彩空间模型是由色调(Hue),饱和度(Saturation)和亮度(Value) 3个颜色分量组成的一类颜色空间。它是面向用户的一种复合主观感觉的颜色空间,通常用于选择颜色,更接近人对颜色的感知。该色彩空间3个分量的相关性较低。所以在选择颜色时,通常由RGB色彩空间转换到HSV色彩空间中,然后再作处理。
1.2 RGB到HSV色彩空间的转换
进行色彩空间的转换运算之前,需要在RGB空间将每个一色彩分量值先归一化,可以通过对每一分量除以255来得到。RGB到HSV色彩空间的转换关系如下:
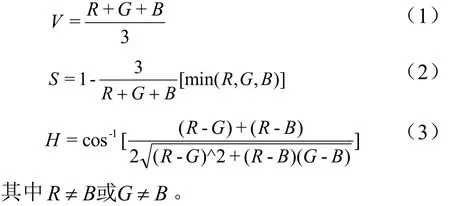
需要说明的是得到V分量的过程实际上是对彩色图像进行灰度化的过程。有时为了在视觉上更接近人的主观感觉,通常在灰度化时给分量各自增加一个加权系数,然后求和。经常用到的灰度化公式如下:

1.3 HSV空间中车牌色彩区域的分割
一般认为,在 HSV颜色空间中,蓝色、黄色的h,s,v分量取值都有一定的范围。经过大量的彩色图像的分析,发现对于彩色车牌图像来说,它的色调、饱和度和亮度值范围,如表1所示。

表1 HSV的取值范围
考虑到黑白车牌出现的频度非常小,本文只研究蓝色和黄色车牌。根据上面表格中车牌颜色的取值规律,只需要设定了颜色中心,车牌区域的像素就可以直接通过对H、S、V3个分量设定范围过滤出来,无需进行较复杂的均值聚类计算,这样可以在定位彩色车牌时节省大量的时间。
根据表 1,将满足 200<h<255 或 25<h<25,0.35<s<1,0.3<v<1 的像素点认为是车牌底色,置为1,其他像素点置为0,即:

假定原图中含有蓝色或黄色车牌,由此可获得车牌的背景颜色,如图1所示。图1(b)为二值图,白色表示车牌底色区域,黑色表示非车牌底色区域。

图1 基于HSV色彩空间的车牌定位结果
由图1(b)可见,如果仅依据车牌底色来定位车牌位置,由于干扰较多,存在较多的候选区域。因此,仅依据车牌底色尚很难确定车牌区域。本文采用数学形态学方法对候选区域作进一步判断,以得到正确的车牌区域。
2 数学形态学处理
2.1 开运算和闭运算
开运算:假定A为输入图像,B为结构元素,利用B对A作开运算,用符号BA◦表示,其定义为:

式中:Θ表示腐蚀运算;
⊕表示膨胀膨胀。开运算实际上是A先被B腐蚀,然后再被B膨胀的结果。开运算一般使对象的轮廓变得光滑,断开狭窄的间断和消除细的突出物。
闭运算:闭运算是开运算的对偶运算,定义为先作膨胀然后再作腐蚀。利用B对A作闭运算表示为BA·,其定义为:

闭运算同样使轮廓变得光滑,但与开运算相反的是,它通常消弭狭窄的间断和长细的鸿沟,消除小的孔洞,并填补轮廓中的断裂。
2.2 形态学处理
现将运用形态学方法进行车牌定位的过程描述如下:
1) 噪声去除。由图1(b),经颜色过滤得到的二值图像含有较多噪声点,采用均值滤波作为预处理。
2) 图像平滑。本文选取矩形结构元素对去除噪声的图像进行形态学闭运算,使其边缘轮廓更为光滑,消除图像中的间断、细长的鸿沟以及小的孔洞,并填补轮廓线中的断裂。如图2(a)所示。
3) 预判断。首先去除面积较小的噪声区域,经实验,阈值设为2000。计算各连通区域的面积,对其按从大到小顺序进行长宽比判断。根据我国车牌的特点,考虑车牌图像可能存在倾斜以及边缘的分割误差,长宽比的范围值为2~4。对判断后的区域进行剪裁,如图2(b)所示。
4) 确定最终目标区域。图2(b)仍含有大量车牌边缘信息,需进一步去除。对所得裁剪区域进行形态学闭运算,找出每个连通区域的中心,如果区域中心位于边缘位置,我们认为该连通区域为车牌边缘,并置为0。结果如图2(c)所示。
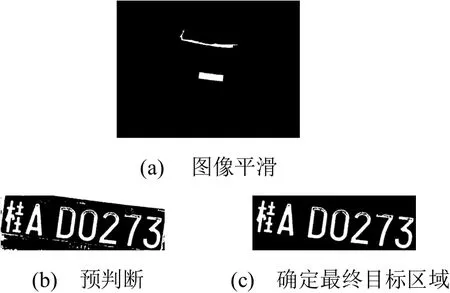
图2 确定最终目标区域示意图
3 倾斜校正
由于道路的坡度、车牌的悬挂、摄像机与车牌之间倾斜角度等的影响,使得拍摄到的车牌图像产生了不同程度的倾斜,这使后续的字符分割和识别极为困难。因此,需要在字符分割之前进行车牌的倾斜校正。本文采取radon变换法求取倾斜角。
二维图像f(x,y)的投影是其在某一方向上的线积分,例如f(x,y)在垂直方向上的二维线积分就是f(x,y)在x轴上的投影;f(x,y)在水平方向上的二维线积分就是f(x,y)在y轴上的投影。推而广之,可以沿任意角度θ计算图像的投影。也就是说,任意角度上都存在图像的radon变换。如图3所示,说明了radon变换的几何原理[11]。

图3 Radon变换的几何原理示意图
通常情况下,f(x,y)的radon变换是一个平行于y′轴的线积分:
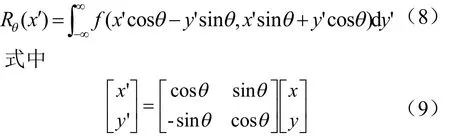
倾斜校正算法可以归结为以下几步:首先,选取图2(c)每一列最下方的1值像素,同时去除图像上半部分的像素以减少干扰,如图4(a)所示。然后,使用radon变换对车牌图像在0~180°内进行投影,取所有角度对应的radon变换值中的最大值,这个值对应的角度即为倾斜校正角度。最后,利用旋转变换对图像进行旋转即可,结果如图4(b)所示。

图4 倾斜校正示意图
4 实验及结论
算法在 Matlab2012a环境实现,对 90张1536×2048的车辆图片进行了测试,车牌类型包括不同省市的汽车牌照,定位成功率为96%。
虽然,对于车牌与车辆颜色相近和天气条件不好的情况,本文方法尚不能很好地解决。但是,相对于灰度定位的方法,本文方法充分利用了车牌的颜色信息,提高了定位准确性;相对于只是用颜色判断的方法,本文方法能将与车牌颜色相近的要求滤除;而且本方法不受车牌位置、大小和背景颜色的影响,如图5所示,因此,本文方法在车牌定位方面具有一定优势。

图5 检测结果
[1]吴舟舟, 李树广. 基于分级边缘间距的实时车牌检测[J]. 中国图象图形学报, 2007, 12(2):315-321.
[2]沈世旻, 盛翊智. 基于边缘检测的车牌图像分割技术[J]. 自动化技术与应用, 2004, 23(3):24-26.
[3]张玉姣, 史忠科. 一种新的车牌识别预处理算法[J].西北工业大学学报, 2002, 20(1):83-86.
[4]李 刚, 曾锐利, 林 峰, 等. 基于数学形态学的车牌定位算法[J]. 仪器仪表学报, 2007, 28(27):1323-1327.
[5]卢雅琴, 邬凌超. 基于数学形态学的车牌定位方法[J].计算机工程, 2005, 31(3):224-225.
[6]薄树奎, 孙新德, 丁 琳. 一种基于彩色图像分割的车牌检测方法[J]. 计算机科学, 2009, 36(4):261-276.
[7]师 文, 杜宇人. 基于数学形态学和颜色的车牌定位[J]. 扬州大学学报(自然科学版), 2010, 13(3):69-73.
[8]陈锻生, 谢志鹏, 刘征凯. 复杂背景下彩色图像车牌提取与字符分割[J]. 小型微型计算机系统, 2002,23 (9):1144-1148.
[9]高朝晖, 黄 卫. 基于彩色图像车牌分割研究[J].公路交通科技, 2004, 21(8):114-117.
[10]李 刚, 黄席樾, 刘 政, 等. 基于字符边缘颜色多分量信息的车牌定位方法[J]. 计算机工程, 2009,35(18):176-178.
[11]徐 瑞. Radon变换在车牌倾斜校正中的应用[J].中国科技信息, 2009, 12:146-147.
Research on License Plate Location Based on HSV Color Space and Mathematical Morphology
Chang Qiaohong, Gao Mantun
( School of Mechanical Engineering, Northwestern Polytechnics University, Xi’an shaanxi 710072, China )
The license plate recognition system has been widely used in highway toll gate and garage management of residential quarters, and license plate location is the precondition of the realization of the whole recognition system. The effects of localization methods based on gray-scale image and color-plate image are not ideal. By making full use of the license plate of a priori information, a method of license plate location based on the HSV color space and mathematical morphology is proposed. First, get the possible objects by using color information as a filter, then generate connected regions by using mathematical morphology techniques and generate the final correct license plate region, and last use radon transform to tilt correction.
license plate location; HSV color space; mathematical morphology; radon transform
TP 391.41
A
2095-302X (2013)04-0159-04
2013-05-27;定稿日期:2013-06-14
常巧红(1989-),女,河南灵宝人,硕士研究生,主要研究方向为计算机图形学。E-mail:18392079140@163.com
高满屯(1962-),男,山西襄汾人,教授,主要研究方向为理论图学、计算机视觉等。E-mail:gaomant@nwpu.edu.cn
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26 14:09:30
数学小灵通(1-2年级)(2020年6期)2020-06-24 05:57:54
电子制作(2019年12期)2019-07-16 08:45:16
小猕猴智力画刊(2017年5期)2017-05-25 21:44:09
中学生数理化·八年级数学人教版(2017年2期)2017-03-25 16:12:51
电子制作(2017年22期)2017-02-02 07:10:11
中学生数理化·七年级数学人教版(2016年9期)2016-12-07 08:18:09
中国继续医学教育(2015年2期)2016-01-06 01:36:16
振动、测试与诊断(2014年6期)2014-03-01 01:14:50
现代检验医学杂志(2014年1期)2014-02-06 01:29:31