
AFS弯道照明光环境研究
2013-09-16 00:51郭凤群
照明工程学报 2013年3期
郭凤群 肖 辉
(同济大学电子与信息工程学院,上海 201804)
1 引言
近年来,随着社会经济的快速发展,人们生活水平得到了很大的提高,家用汽车的数量呈现快速增长的趋势。在汽车成为人们出行必不可少的交通工具之一的同时,汽车行驶的安全性一度成为大家关心的话题。文献 [1]表明,82%的汽车事故发生在夜间照明状况不佳的情形下;文献 [2~4]统计显示,夜间行车发生重大事故约为白天的1.5倍,且60%的事故发生在照明不佳的弯道处。因为汽车夜间在弯道上行驶时,常常会在弯道内侧出现视觉“盲区”,这种视觉“盲区”是汽车行驶过程中由于前照灯照明区域固定而产生的。行驶过程中,驾驶员的视线由于惯性而被禁锢在光束照射的直线范围内,从而存在交通安全隐患,基于此,“自适应前照灯系统 (AFS)”便应运而生。
AFS(adaptive front-lighting system)是一种能自动改变两种以上的光型以适应道路状况、车辆行驶条件以及天气状况等外部因素变化的前照灯系统。现有的AFS虽然能够在一定程度上提高弯道行车的安全性,但该系统存在一定的局限性——明显滞后、精确度不高等,原因是从驾驶员发现弯道到转动方向盘有一定的反应时间和滞后时间,如果弯道前方有障碍物,由于驾驶员准备不足,很容易造成事故。因此,传统的AFS虽然在汽车主动安全领域发挥了重要作用但其局限性也是不容忽视的。基于此,本文提出一种基于CCD(charge-coupled device)的汽车AFS弯道照明系统,该系统利用CCD图像识别技术,将距车一定距离的弯道信息进行采集,提前按不同的车速和采集到的前方弯道半径使近光灯进行随动,实现前照灯光束的预调整,保证进入弯道时前照灯光束的覆盖区域,避免照明死角的出现。这种方式采用CCD提前对弯道进行光环境适应性调整,弥补了传统AFS系统明显滞后以及车灯旋转角度不足的缺陷,实现车灯的主动旋转。同时,利用灯光引导驾驶员执行入弯的正确操作,因此基于CCD的AFS弯道照明系统才是一种真正意义的主动式安全系统。
2 道路照明光环境
道路照明是指在道路上设置照明器为夜间行驶的车辆和行人提供必要的能见度。良好的城市机动车交通道路照明可以保障交通安全,提高交通运输效率,降低驾驶人员视觉疲劳。
CJJ 45—2006《城市道路照明设计标准》中,对机动车交通道路照明标准值进行规定,见表1。

表1 机动车交通道路照明标准值Table 1 Lighting standard of the roadway
从表1可以看出,夜间道路照明环境亮度水平一般在1.5cd/m2,在明视觉 (大于10cd/m2)和暗视觉 (小于0.001cd/m2)之间,因此夜间道路照明处于中间视觉范畴。
由于驾驶员行车过程中,需要辨别前方是否有行人或障碍物,而现在的城市道路或乡村公路的道路照明依然存在照明不佳的情况,特别是在弯道处,如果照明条件不佳,更容易出现交通事故,所以除道路照明外汽车前照灯的照明对行车安全也是至关重要的。此外,在夜间,由于车辆正前方与周围环境之间有明显的亮度对比,人眼经过长时间高度集中于前方道路状况,容易产生视觉疲劳;同时由于前照灯光束的指示作用,视线容易被约束在光束照射的直线区域。如果前方突然出现弯道,驾驶员的视线将由于视觉暂留现象停留在之前观察到的直线上而无法对前方道路作出准确判断,且驾驶员需要一定的反应时间和停滞时间,到驾驶员对弯道做出反应转动方向盘时,车辆已经进入弯道,如果前方弯道内侧出现障碍物,驾驶员将因无法及时作出正确的反应而导致交通事故。
3 汽车AFS弯道照明光环境
前照灯是汽车最重要的外观件之一,也是最重要的主动安全功能件之一,因此其配光是灯具配光的重点和难点之一。汽车前照灯的配光需满足:足够的照度,无眩光,足够宽的照明范围。
3.1 汽车前照灯近光配光
GB 4599—1994《汽车前照灯配光性能》对国产M、N类两类汽车使用的各种类型前照灯配光性能做了明确规定:在配光屏幕上,前照灯近光配光是非对称形,有明显的明暗截止线,在左上方为暗区,右下方为亮区。近光配光有两种形式:一种是在V-V线的左侧,明暗截止线为水平线,右侧为与水平线向上15°的斜线;另一种为明暗截止线右边向上成45°斜线至垂直距25cm转向成为水平的折线,为Z型非对称配光,如图1所示。
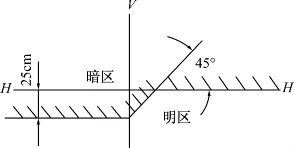
图1 Z型非对称配光示意图Fig.1 Unsymmetrical light distribution of type Z
GB 25991—2010《汽车用LED前照灯》和GB 4599—2007《汽车用灯丝灯泡前照灯》中规定:前照灯近光配光性能应在距离前照灯基准中心前25m的垂直平面配光屏幕上测量,各测试点、区的位置如图2所示。

图2 汽车前照灯配光屏幕示意图Fig.2 Measuring screen of headlamps
3.2 汽车AFS系统弯道光环境分析
现有的自适应前照灯控制系统是通过车载装置感知驾驶员转向操作与行车状态,获取方向盘转角、车速、车身高度等信息,计算车灯偏转角度,并通过执行机构调整车灯旋转,为驾驶员提供最佳的弯道照明效果。
图3(图片来源于网络)所示为有无AFS两种情况下,汽车行驶于弯道时前照灯照明区域的示意图,图中上半部分所示,无AFS的汽车进入弯道时,由于前照灯照明光束始终与汽车行驶方向一致,大部分光束投射到右边区域而导致左边被投射部分较窄,从而无法照射到左前方障碍物。图中下半部分所示,有AFS的汽车进入弯道时,前照灯光束能够顺利照亮左前方有障碍物的区域。
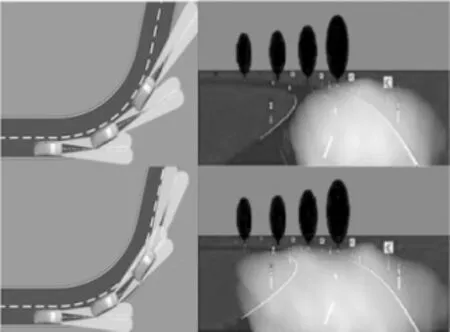
图3 无AFS和有AFS系统的汽车弯道行驶情况比较Fig.3 Comparison of the lighting area of headlamps without AFS and with AFS when driving in the corner
4 基于CCD的AFS弯道照明系统
由于汽车在弯道行驶时,弯道内侧容易出现视觉“盲区”,因此为提前得到适应弯道的前照灯光束,本文提出一种基于CCD的AFS弯道照明系统。该系统通过CCD图像传感器获取车辆前方的弯道信息,利用车速传感器测量当前车辆的行驶速度,以及采用车身高度传感器获取车身高度 (车辆质心)变化信息。这些信息通过CAN总线进行传输,经控制单元进行信息交互、算法处理后发送至转角驱动机构以实现车灯角度的旋转,以适合弯道的前照灯光束进入前方弯道。
4.1 基于CCD的AFS弯道照明系统原理及框架
车辆即将进入弯道时如图4[5]所示的 A点,在CCD图像采集的有效距离内,CCD开始采集弯道信息,结合行车速度、车身高度信息,经电控元件对执行机构输出控制信号,控制电机调节汽车前照灯 (近光灯)的旋转,使光轴始终与车身保持水平的同时改变照明区域。当汽车到达图4所示的B点即入弯时,汽车已完成了前照灯光束的调整,汽车以能适应弯道的照明光束进入弯道,避免了“盲区”的出现,提高了行车的安全性。
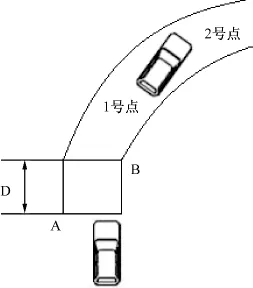
图4 弯道示意图Fig.4 Schematic diagram of driving into the corner
因此,如何设计合理的传感器检测方案进行路径的识别、如何将检测到的路面信息进行实时处理,进而快、准、稳的控制电机的转向成为该控制系统的核心[6]。
图5为该照明系统框图,该系统由电子控制单元模块、传感器模块、电源模块、电机驱动模块和辅助调试模块组成。从传感器获得的弯道半径、车速、车身高度信息在车载AFS控制单元内进行处理[7],给出当前最精确的前照灯转动偏角,以获取车辆入弯时适宜的照明光束,以达到减少视觉“盲区”的目的。
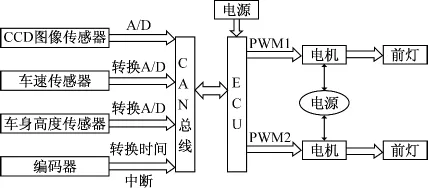
图5 基于CCD的AFS弯道照明系统框图Fig.5 Block diagram of AFS lighting system for corner based on CCD
4.2 车速与停车视距、圆曲线最小半径“一般值”的关系
汽车在行驶过程中,看到前方出现障碍物或发现前方危机时,最极端的应对措施就是制动。一般情况下,从发现障碍物到踩下刹车到制动器启动需要1.5s的时间,反应时间内,汽车仍以当前时速行进,因此前灯需要旋转的角度就是保证此反应时间内制动距离的照明。从开始制动至到达障碍物前安全停车的最短距离,称为停车视距。主要包括反应距离、制动距离和安全距离[8]。其对应关系如图6所示。
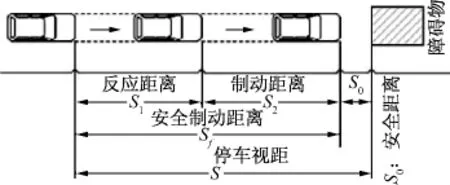
图6 停车视距Fig.6 Stopping sight distance
JTG D20—2006《公路路线设计规范》和JTG B01—2003《公路工程技术标准》中对各级公路每条车道的停车视距和一般圆曲线最小半径作出明确规定,如表2所示。
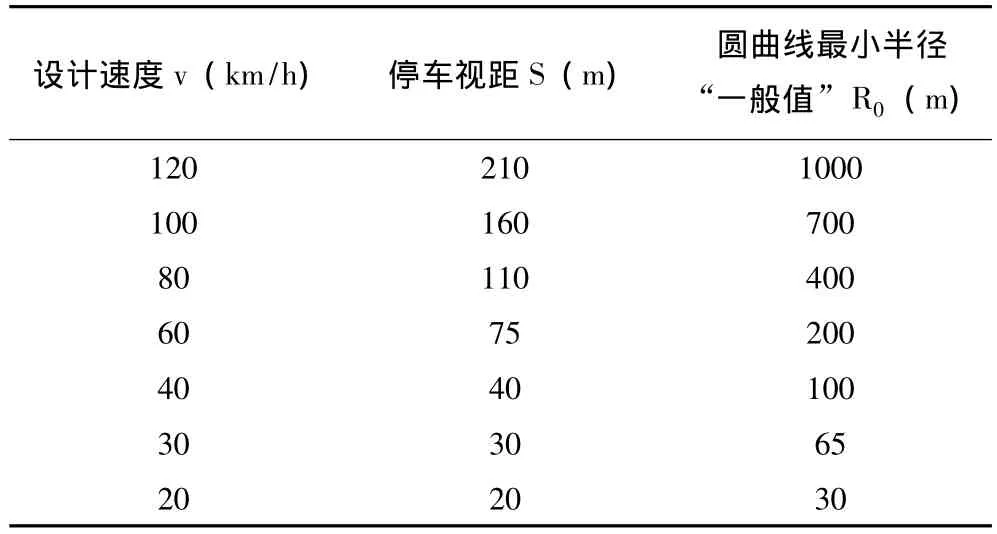
表2 汽车车速——停车视距和一般圆曲线最小半径之间的对应表Table 2 Corresponding relationships of velocity,stopping sight distance and minimum radius of general circular curve
从表2可以看出汽车车速≥100km/h时,道路圆曲线最小半径的一般值已经超过ECE R48法规规定的汽车车灯转弯模式开始工作时的最大转弯半径500m。因此,选取汽车行驶速度低于100km/h的停车视距设计汽车AFS水平转角。
根据所给数据的特点,利用MATLAB采用最小二乘法进行二次拟合,即将已知的数据用二次曲线近似地表示出来。即速度与停车视距存在式 (1)所示关系;而圆曲线最小半径“一般值”与速度的关系如式 (2)所示:

4.3 车灯水平方向旋转模型
车灯水平旋转能够保证在入弯时弯道内侧无视觉“盲区”。同时,汽车行驶中,进入弯道时驾驶员转动方向盘的同时车身会发生旋转,导致车身前倾,原本与路面保持水平的前照灯光束将产生倾斜,使前方弯道照明区域变窄,而驾驶员由于光线的引导作用,视野将比直道时窄,这对夜间弯道行车安全非常不利。但是这种变化出现在汽车行驶弯道的途中,而无法通过CCD图像传感器获取的弯道信息来提前获知车辆在弯道行驶时车身高度即将发生的变化。因此,AFS系统中利用车身高度传感器获取车身高度 (车辆质心)的变化信息是一种实时状态而无法提前预知,从而本文只着重研究车灯水平旋转角度模型并进行仿真。
汽车进入弯道时,以左转弯为例,正常情况下的光束会在弯道内侧出现明显的视觉“盲区”,如果汽车此时进入弯道,受“盲区”的影响将无法清楚地看清弯道情况,容易发生交通事故。因此,为夜间汽车转弯时视线范围内不出现“盲区”,前照灯需要旋转一定的角度以保证汽车有效制动距离,即需要对转弯时汽车前照灯 (近光灯)进行调整,使光束能够照亮弯道内侧的“盲区”。
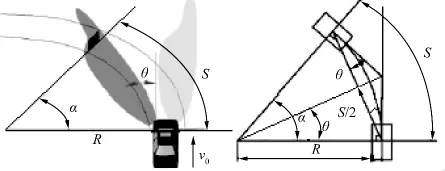
图7 汽车左转弯模型Fig.7 Model of turning left
根据图7[9],得到汽车前照灯水平旋转角度计算公式如下:
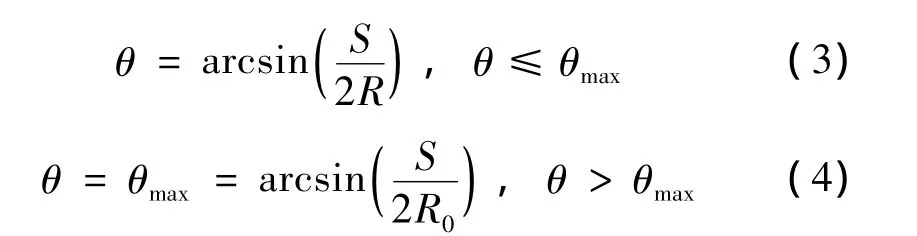
其中 S——表示停车视距,由式 (1)计算所得;
v——表示车辆当前行驶速度;
R——表示弯道半径;
R0——表示圆曲线最小半径“一般值”,由式
(2)计算所得。
根据转弯方向不同,汽车左右前照灯旋转角度不同:当车辆右转弯时,右近光灯旋转照亮车辆右侧道路;当车辆左转弯时,左近光灯旋转照亮车辆左侧道路[10]。利用MATLAB进行仿真,得到如图8所示的不同弯道曲率半径下各速度对应的车灯水平方向旋转角度情况;图9所示不同速度下不同弯道曲率半径对应的车灯水平方向旋转角度,从图8所示可知,车灯水平旋转角度小于15.65度,因此选择图9中红色标注线以下水平旋转角度小于15.65度的水平旋转角度、车速和弯道半径三者之间的关系模型:
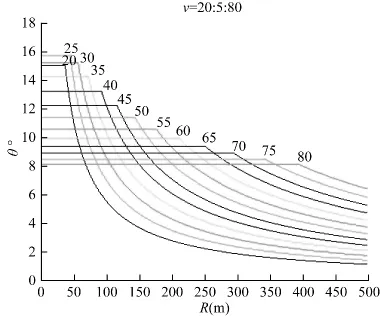
图8 不同弯道曲率半径下各速度对应的车灯水平方向旋转角度Fig.8 Level rotation angles corresponding to different velocities under different curvature radiuses
图10所示为汽车安装基于CCD图像传感器的AFS照明系统后左转弯示意图,从图中可以看出,当汽车在直道上行驶时,即图中A点所示位置,前照灯光束与车道平行,视野范围内有足够的光束照亮前方道路情况;当汽车即将驶入弯道,图中位置B所示,汽车通过AFS系统提前调整光束使之能适应前方弯道,此时汽车驶入弯道,弯道内侧将不再出现视觉“盲区”;出弯时即C点位置,根据前方道路情况,又将光束调整为与车道平行,使之适应车辆直道行驶。
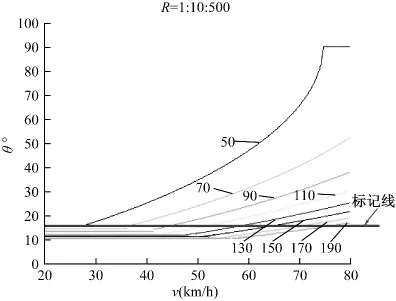
图9 不同速度下不同弯道曲率半径对应的车灯水平方向旋转角度Fig.9 Level rotation angles corresponding to different curvature radiuses under different velocities
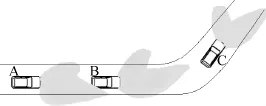
图10 安装基于CCD的AFS照明系统的汽车左转弯示意图Fig.10 Schematic diagram when the vehicle with this new AFS turning left
从图10可知:该系统通过车速传感器检测汽车当前速度,以得到汽车的停车视距S,通过CCD图像传感器采集弯道曲率半径R,从而得到车灯在水平方向上的旋转角度θ,再通过执行机构——电机(旋转马达)对前照灯进行水平方向的旋转最后得到适应弯道的前照灯照明光束。
5 结束语
目前国内的AFS多数是通过横向加速度传感器结合车速计算弯道半径,而国外的AFS则通过方向盘转角传感器结合车速计算转弯半径,这两者方法均存在较大的误差,对车灯转角的控制精度相对较低。基于此,本文提出的基于CCD的汽车前照灯控制系统对弯道半径信息采集的方法明显优于以上两种方法,可以根据实时接收到的弯道成像来计算转弯半径。一方面,该系统中光轴的偏转动作是优先于驾驶员转动方向盘的动作的,主要意义在于可以使灯光主动引导驾驶员视线,体现出了AFS主动化的思想理念、提高车载AFS控制系统的智能化和主动性。另一方面,本文提出的基于CCD图像识别技术的AFS系统虽然只针对弯道照明,但CCD图像采集的速率快,也为今后将其用于路面综合信息的识别提供条件:可以研究出一套可以同时完成对路面积水、转弯道路、高速公路、乡村道路和城市道路的综合识别的主动式AFS系统,该AFS系统对复杂的路况具备提前感知的能力,提前调整相应的配光模式。因此,CCD图像识别技术凭借其高灵敏度、高抗震性以及低成本将成为汽车AFS未来的一个发展方向。
[1]Kobayashi S,Takahashi K,Yagi S.Development of New Forward Lighting Systems with Controllable Beams [J].SAE Paper.1997(249):19 ~35.
[2] Kobayashi S.Intelligent Lighting Systems:Their History,Function and General Direction of Development[J].SAE Paper,1998(1323):141 ~149.
[3]Aoki T.Development of Active Headlight System [J].SAE Paper,1997(1249):51 ~55.
[4]Neumann R.System Intergration in Automotive Lighting-Improvement in Visibility at Night[J].SAE Paper,2002(1249):79~89.
[5]杜江伟,吴超仲,马杰等.车路协同环境下车辆前照灯自适应控制方法研究 [J].交通信息与安全,2011,05.
[6]付永领,付剑,张晔等.基于CCD传感器的智能车辆控制系统设计 [J].仪表技术与传感器,2010,No.2.
[7]崔慧中,关志伟.智能前照灯系统 (AFS)研究现状综述[J].天津工程师范学院学报,2008,18(1):47~50.
[8]孟德良,韩峻峰,潘盛辉等.汽车AFS系统车灯转角模型研究 [J].汽车科技,2011,09,No.5.
[9]邓亮,陈抱雪,张建彬,顾东超,孙海涛.AFS前照灯弯道旋转的计算模型 [J].中国机械工程,第22卷第7期,2011年4月上半月.
[10]关志伟,崔慧中,郑飞.汽车AFS前照灯转角动力学建模及仿真 [J].汽车技术,2009,No.5.
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
华人时刊(2019年13期)2019-11-26
汽车维护与修理(2018年7期)2018-10-13
资源再生(2017年4期)2017-06-15
电子制作(2017年9期)2017-04-17
汽车维护与修理(2016年4期)2016-11-26
为了孩子(3~7岁)(2016年5期)2016-05-14
中国卫生(2015年5期)2015-11-08
汽车零部件(2014年7期)2014-06-23
汽车科技(2014年6期)2014-03-11
