
基于GMR传感器的三轴电子罗盘*
2013-09-13 07:55林乾浩钱正洪龚天平詹宏良孟庆丰孙宇澄杨昌茂
机电工程 2013年1期
林乾浩,钱正洪*,龚天平,白 茹,詹宏良,孟庆丰 ,孙宇澄 ,3,杨昌茂
(1.杭州电子科技大学 磁电子中心,浙江 杭州 310018;2.东方微磁科技有限责任公司,湖北 宜昌 443003;3.四川大学 材料科学与工程学院,四川 成都 610064)
0 引 言
电子罗盘是一种新型的重量轻、体积小、稳定性高、可靠性好的姿态检测模块,广泛应用于航空、航天、航海、车辆导航、智能终端设备等领域[1]。近年来,智能手机、平板电脑和游戏机等消费电子设备的导航功能已经使电子罗盘变成标准配置[2],从而对电子罗盘的市场需求也不断增加。
目前应用最多的测量地磁场的传感器主要有3种:磁通门传感器、霍尔传感器、AMR传感器。磁通门传感器磁场分辨力高、受铁磁物体干扰小,但它们体积大、频响特性差。霍尔传感器量程大但灵敏度低、温度性能差。AMR传感器是目前在电子罗盘中应用最多的一类传感器,但其需要置位/复位电路来消除磁滞,从而使后端处理电路变得复杂。GMR传感器属于一类新型的传感器,与AMR传感器相比,具有体积小、灵敏度高、线性度好、磁场分辨率高、接口电路简单等诸多优点,更适合于电子罗盘的应用,代表了未来电子罗盘的发展方向[3]。
本研究提出一种基于GMR传感器的电子罗盘测量系统,采用一个两轴的GMR传感器和单轴的GMR传感器测量磁场矢量,结合三轴加速度传感器测定航向角、俯仰角和横滚角。针对传感器的制造误差和环境中存在的磁场干扰,提出一种带有自动校准功能和磁场补偿的校准方法,能够有效地提高电子罗盘的测量精度。
1 三轴电子罗盘的硬件设计
巨磁阻电子罗盘总体设计结构如图1所示,主要包括传感器及信号调理电路部分和微控制器及外围电路部分[4]。系统首先采集三轴GMR传感器和三轴加速度传感器的信号,由于GMR传感器输出的信号在几个毫伏左右,本研究需要通过信号调理电路进行信号的放大滤波,并与加速度传感器得到的经过滤波后的信号一起送到微控制器进行A/D转换,并将处理后的数字信号进行软件数字滤波、航向和姿态解算、误差补偿校准处理,最终通过串口实时输出稳定的姿态角。
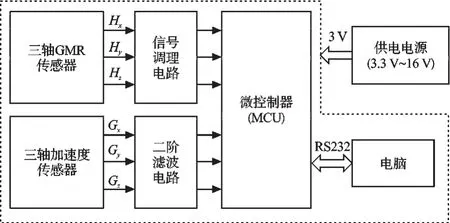
图1 三轴电子罗盘的设计框图
1.1 传感器及信号调理电路
本研究设计的电子罗盘选用的是东方微磁科技有限公司生产的高灵敏度双轴SAS022-1和单轴VA100F3巨磁阻自旋阀传感器,来组合成三轴GMR传感器。
GMR传感器输出曲线如图2所示。
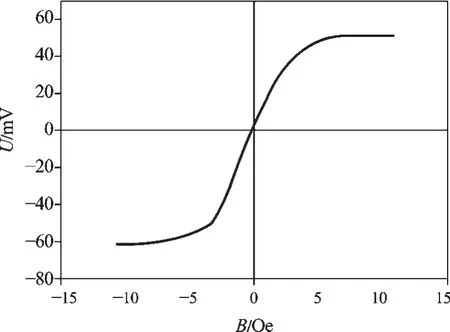
图2 GMR传感器典型响应曲线
使用GMR传感器时数据采集电路设计非常简单,不需要像AMR传感器一样带有置位/复位电路,并且具有很高的灵敏度、线性度和磁场分辨率,该传感器线性测量范围在±3 Gauss,灵敏度为4.1 mV/V/Oe[5],而AMR传感器的灵敏度一般只在1 mV/V/Oe左右,所以通过选用该GMR芯片可以保证罗盘的分辨率和精度。
三轴加速度传感器采用的是ST公司的LIS332AR。该传感器尺寸小、功耗低,并可提供模拟电压输出,每个轴的电压在0.9 V~2.1 V之间变化,测量范围是±2 g,可直接接入单片机的A/D接口进行模数处理。
由于GMR传感器在地磁场影响下只产生毫伏级的差分电压,本研究选择ADI公司的OP2177运算放大器进行差分信号放大,单个GMR传感器的调理电路如图3所示。
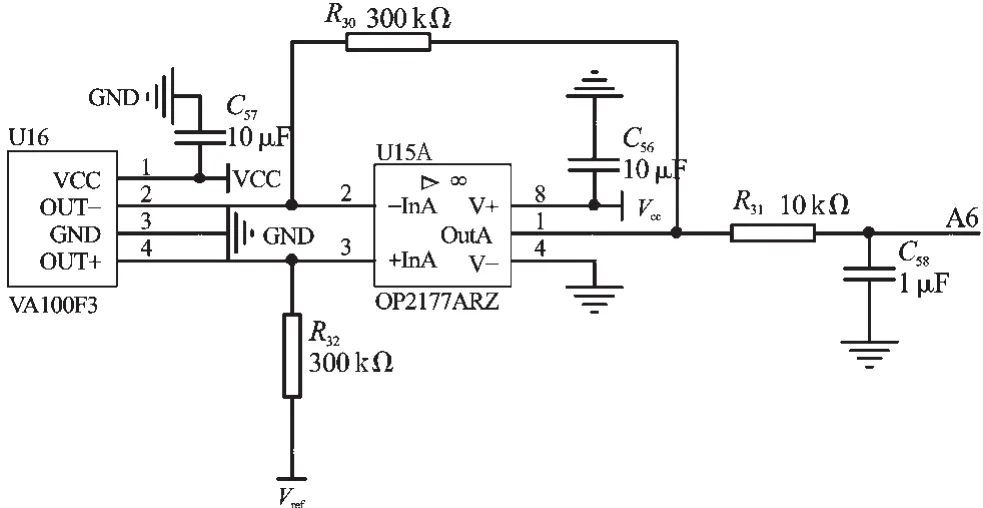
图3 单个GMR传感器的信号调理电路
GMR传感器实测电阻为2.46 kΩ,电路中反馈电阻为300 kΩ,所以该电路放大倍数为115倍。同时笔者给放大器增加1.5 V的参考电压,使最终输出结果在0~2.5 V以内。最后,将GMR传感器放大后的信号与加速度传感器产生的信号一起经过RC低通滤波电路滤波并送到微控制器的6路A/D口。
1.2 微控制器及外围电路部分
本研究选用MSP430F2618TPM芯片作为微控制器,单片机及外围电路图如图4所示。
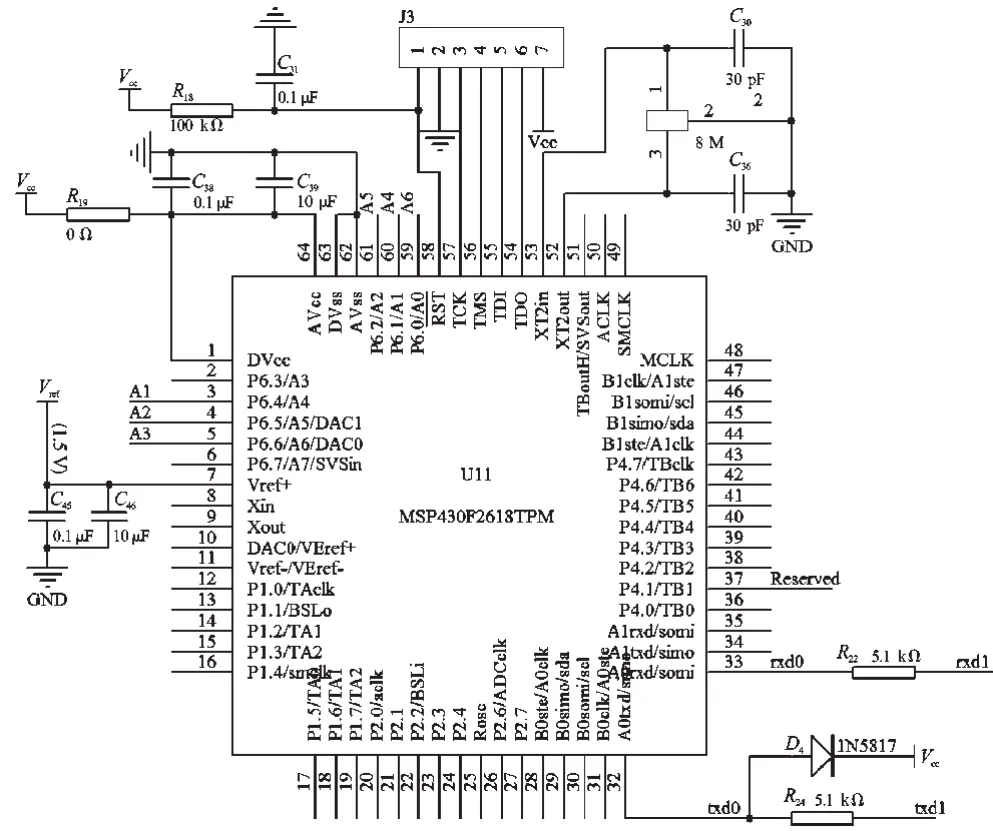
图4 单片机及外围电路图
该单片机具有强大的处理能力、超低功耗、高性能模拟技术及丰富的片上外围模块,集成了12位ADC、UART、SPI和JTAG等片内外设,拥有116 KB的Flash程序存储器,可用于非易失性数据存储。单片机主要工作是将传感器采集到的模拟信号进行A/D处理,并将处理后的数字信号进行软件数字滤波、姿态解算和误差补偿校准,最终通过串口把解算出来的姿态信息传输到电脑上。其中,硬件电路中时钟晶振采用8 M无源晶振;J3是单片机的JTAG接口,能够进行电路硬件仿真和程序下载;MSP430单片机的Vref+管脚能够产生1.5 V的稳定电压供运算放大器作为参考电压使用;本研究在串口输出信号部分增加了TTL电平输出电路。
2 磁罗盘测量的基本原理
地球本身存在地磁场,磁场强度在0.5 Gauss左右,其方向总是指向磁北,GMR传感器正是利用地磁场的这一特性来确定载体运动过程中的任一姿态的磁场分量,载体在三维空间中,运动时载体坐标系时刻在发生变化,与地理坐标系不重合。由于电子罗盘与载体是同步运动的,相对于地理坐标系也是在不断变化的。本研究把罗盘相对于地理坐标系XYZ3个轴方向上绕顺时针转动的角度分别定义为横滚角γ、俯仰角θ和航向角φ,坐标示意图如图5所示[6]。

图5 三轴电子罗盘坐标示意图
在应用中GMR传感器测量到的磁场矢量值在载体坐标系中的坐标为(Hx,Hy,Hz)。本研究利用方向余弦法,结合转动过程中的俯仰角θ和横滚角γ,可将载体坐标系转换到地理坐标系中[7],其坐标(X,Y,Z)可表达为:

由式(1)得出:

进而可求出航向角:
其中,俯仰角θ和横滚角γ可以通过加速度计3个轴检测到的分量(gx,gy,gz)解算出来。
俯仰角:

横滚角:

由于传感器制造过程中存在误差,3个GMR传感器存在零场偏置和灵敏度差异,此外,工作环境中存在一些磁场干扰,也会影响GMR传感器的测量值。由于存在的这些误差不可避免,本研究必须对电子罗盘进行校正补偿[8-9]。
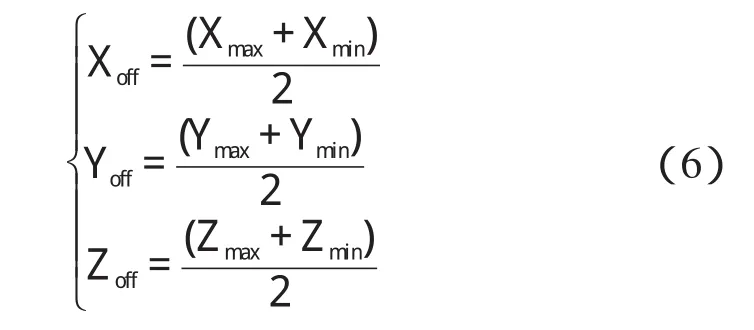
校准方法为:将电子罗盘水平放置旋转一周,采集GMR传感器X轴和Y轴测量结果的最大值和最小值,记为(Xmax,Xmin,Ymax,Ymin),并将罗盘垂直旋转90°放置,再水平旋转一周,采集GMR传感器Z轴测量结果的最大值和最小值,记为(Zmax,Zmin)。
巨磁阻的在零场偏置和磁场干扰影响下的偏移值(Xoff,Yoff,Zoff)为:
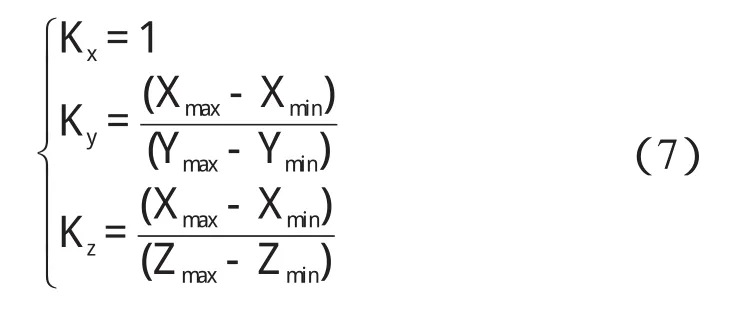
巨磁阻传感器的每个轴灵敏度值(Kx,Ky,Kz)为:
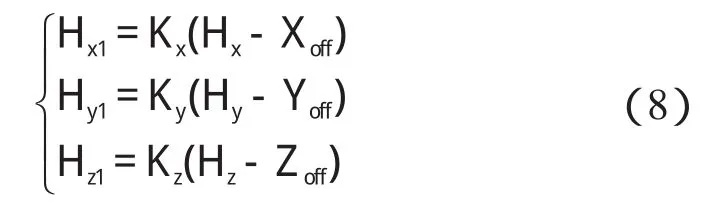
经过校正补偿,设经过校准的磁阻传感器3个轴的分量为(Hx1,Hy1,Hz1),则:
3 三轴电子罗盘的软件设计
该系统设计的电子罗盘的工作模式分为正常模式和校准模式[10-13]。当电子罗盘上电后,系统默认进入正常模式,如果在正常工作模式下,接收到串口发送的校准命令,则执行相应的校准程序。
系统在正常工作模式下的程序设计流程为:系统初始化;从Flash中读取巨磁阻传感器的每个轴的中点电压值(Xoff,Yoff,Zoff),每个轴的灵敏度(Kx,Ky,Kz),加速度传感器每个轴水平参考值(Gxoff,Gyoff,Gzoff);接着采集传感的原始数据,并对得到的数据进行软件数字滤波处理;然后进行航向和姿态解算,并按照一定的数据格式将航向角、俯仰角、横滚角和传感器原始数据输出到电脑上。
其程序流程图如图6所示。
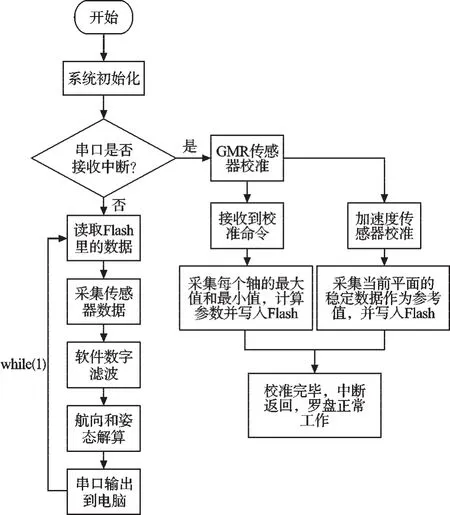
图6 程序流程图
当MCU收到用户发送的GMR传感器校准命令时,程序进入GMR传感器校准流程;电子罗盘采集GMR传感器每个轴的最大值和最小值,完成工作后,计算GMR传感器相关的参数并保存到Flash;当MCU收到用户发送的加速度传感器校准命令时,程序进入加速度传感器校准流程,电子罗盘采集当前平面稳定的加速度数据,设为水平参考值,并将相关参数保存到Flash;校准完毕后中断返回,罗盘正常工作。
4 实验结果分析
电子罗盘经过国家弱磁一级计量站进行实验测量,实验调试装备如图7所示(该测试环境外界磁场干扰很小)。

图7 实验调试设备
本研究首先将罗盘置于夹具上并放置在标准无磁转台上进行校准,并在转台上以水平和30°倾斜两种状态分别每隔30°输出一次数据,通过对比标准转台上的刻度与串口输出结果,可以分析罗盘的具体误差。为了验证算法对磁干扰的补偿是否有效,本研究还加上一组带有铁磁性物质固定干扰源与电子罗盘一起校准的对比实验。
校准后航向角误差如图8、图9所示,电子罗盘水平精度在±1°以内,30°倾斜后精度在±1.5°以内,分辨率为0.1°,罗盘可在0°~360°范围内测量。并且在加上一组带有铁磁性物质的固定干扰源进行校准后,罗盘精度也保持在原先的精度水平,证明了本研究设计的校准算法能够很好地对磁场干扰进行补偿。
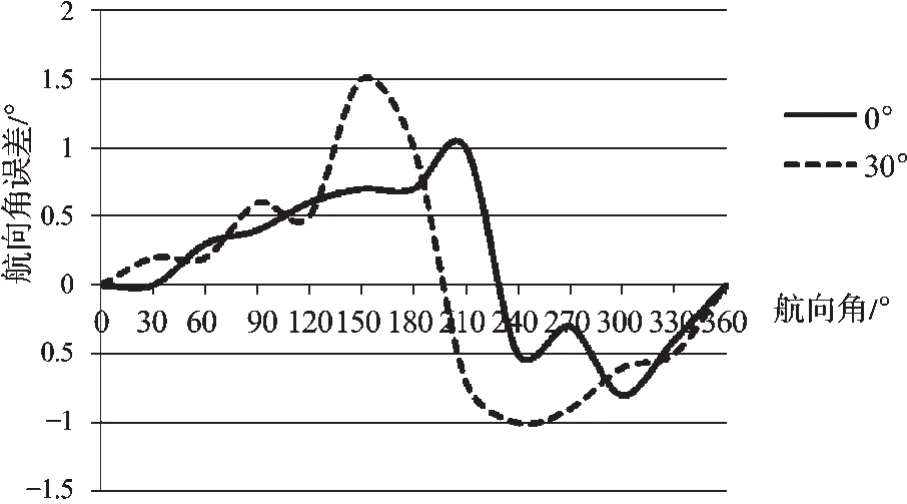
图8 无干扰源电子罗盘误差曲线
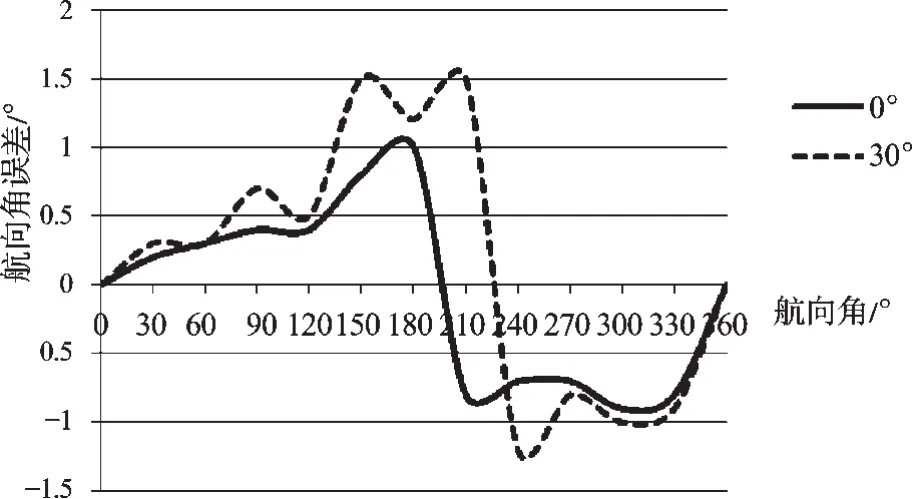
图9 有干扰源校准后电子罗盘误差曲线
5 结束语
目前,市面上基于新型的GMR传感器进行研制的电子罗盘未见报道,本研究设计的电子罗盘硬件电路简单、体积小、功耗低,具有自动校准与磁场补偿算法功能。经实验验证,通过校准后该罗盘水平航向精度达到±1°,30°倾斜后精度达到±1.5°,罗盘分辨率为0.1°。
研究结果表明,本研究设计的电子罗盘能够有效地补偿磁场干扰,具有较高的测量精度,所研制的三轴电子罗盘在手机、车载、船舶等导航系统具有潜在应用价值。
(References):
[1] CARUSO M J.Applications of magnetic sensors for low cost compass systems[C]//Position Location and Navigation Symposium IEEE 2000.Sam Diego:[s.n.],2000:177-184.
[2] CARUSO M J.Applications of magnetoresistive sensors in navigation systems[J].Sensors and Actuators,1997,42(9):15-21.
[3] 时劭华,钱正洪,白 茹,等.基于GMR传感器的小体积二维电子罗盘设计[J].机电工程,2012,29(6):650-653.
[4] 刘敬彪,郑玉冰,章雪挺.三轴磁罗盘的设计与误差校正[J].自动化仪表,2008,29(9):10-12.
[5] 钱正洪,白 茹,黄春奎,等.先进磁电子材料和器件[J].仪表技术与传感器,2009(z1):96-101.
[6] 马 文.数字式磁罗盘误差补偿及数据处理方法研究[D].上海:上海交通大学电子信息与电气工程学院,2007.
[7] 王永强.基于地磁测量的数据字罗盘研究[D].上海:上海交通大学电子信息与电气工程学院,2007.
[8] 王 璐,赵 忠,邵玉梅,等.磁罗盘误差分析及补偿[J].传感技术学报,2007,20(2):439-441.
[9] 袁智荣.三轴磁航向传感器的全姿态误差补偿[J].传感器技术,2003,22(9):34-36.
[10] 王永强,曾连荪,金志华.一种基于磁阻传感器的数字罗盘的设计[J].计算机测量与控制,2007,15(12):1864-1866.
[11] 杨新勇,黄圣国.磁罗盘的罗差分析与验证[J].电子科技大学学报,2004,33(5):547-550.
[12] 李 珊,范大鹏,张智永,等.三轴磁罗盘的高精度误差补偿算法研究[J].传感器世界,2006,11(9):19-22.
[13] 付敬奇.智能磁方位传感器设计[J].仪器仪表学报,2004(8):172.
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
作文·初中版(2017年2期)2017-03-06
中学生数理化·高二版(2016年12期)2017-02-28
电子制作(2017年24期)2017-02-02
Coco薇(2016年1期)2016-01-11
新闻传播(2015年9期)2015-07-18
发明与创新(2015年25期)2015-02-27
