
基于调频连续波雷达的动态背景建立方法
2013-09-12 07:50:12成海朋
兵器装备工程学报 2013年9期
吴 洋,成海朋,王 诚
(中国航天空气动力技术研究院,北京 100074)
民用安防雷达布防系统适用于复杂环境及背景起伏情况下动目标识别跟踪的情况。与传统的脉冲雷达相比,调频连续波(frequency modulation continuous wave,FMCW)雷达具有低发射功率、低截获性、小型固态化、高距离分辨力、大时间带宽积、高灵敏度以及高抗有源干扰能力等优点,在工程上得到广泛的应用。FMCW雷达测距的实质就是对差拍信号的频率进行估计,即FMCW信号处理的基本任务就是估计出差拍信号的频率,然后利用差频和距离之间的线性关系达到测距目的,而选择三角波作为调制信号,通过三角波上升段和下降段的频率可以得到目标的速度信息。
随着技术进步和器件成本逐渐降低,FMCW雷达逐步应用到民用领域,监狱安防监视、机场无人区监视、工厂仓库监视等都可以通过FMCW信号雷达实现,并通过测距功能进行防区范围设置。民用领域中监视场所多不是静空区域,监视区内可能包含墙壁、电缆、钢网等固定物体,形成复杂待检测区域,现有的解决方案是通过开机时段的环境学习进行背景建立,通过实时的环境情况反馈与已建立的背景进行比对来确定是否存在目标,这种方法没有切实考虑到发射和接收功率的波动以及背景的起伏,实践表明建立固定的背景环境无法真实反映目标运动情况,且由于背景起伏而造成虚警率较高。针对上述强杂波的复杂环境,提出了通过动态背景作为参考来识别动目标的方案,有效的解决了这一问题。具有较好的实用价值及应用前景。
1 FMCW雷达测距测速原理
调频连续波雷达基本工作原理是通过连续周期性地调制发射信号频率,并分析发射时刻和接收时刻的信号频率,从而得出汽车周围物体的相对距离和速度。
为了探测防区内的动态物体,雷达发射信号可以采用时域中线性的三角形频率扫描,如图1所示。这里Δf是扫描频率的最大和最小值之差,Tm是扫描的时间。

图1 三角波调制信号
雷达接收到的物体反射信号与发射信号存在2R/c时间的延迟,如图2所示。其中R是车与物体的相对距离,c真空中的光速,虚线表示的是物体静态时雷达对应的接收频率。

图2 调频连续波雷达工作原理
fb为拍频,它等同于对静态物体的发射和接收频率之差。根据简单的三角关系可得:

对于一个动态的物体,当观察者以v相对速度向波源移动时,所接收到的波长为λ的信号的频率相对于波源发出的频率会有一个v/λ量的频移,即多普勒频移。对雷达来说,这个效应在信号的往返过程中发生了两次。因此总的多普勒频移可以表示:

对动态物体的发射和接收频率之差可以表示:

Δf1和Δf2即中频信号,它们是实际电路中需要通过雷达探测获得的结果。通过简单的公式变换可得:


将式(5)带入式(1)并做适当变换即可得到距离R

将式(6)带入式(2)并做适当变换即可得到相对速度v

2 算法设计实现
算法的主要设计依附于某微功率雷达系统的信号处理过程。该雷达系统的前端采用具有混频功能的射频天线头,能够完成发射信号和回波信号的混频,采集部分可以直接面对中频信号。依据系统探测范围及奈奎斯特低通采样定理可以确定本系统的采样率,根据系统分辨率要求可以选择快速傅里叶变换点数,考虑处理耗时、系统需求选择和系统的运算处理能力,选择在1 s内完成多次(例如20次)采集处理过程。每秒的采集处理时间片分配如图3所示,以达到实时处理的目的。全系统处理流程如图4所示。
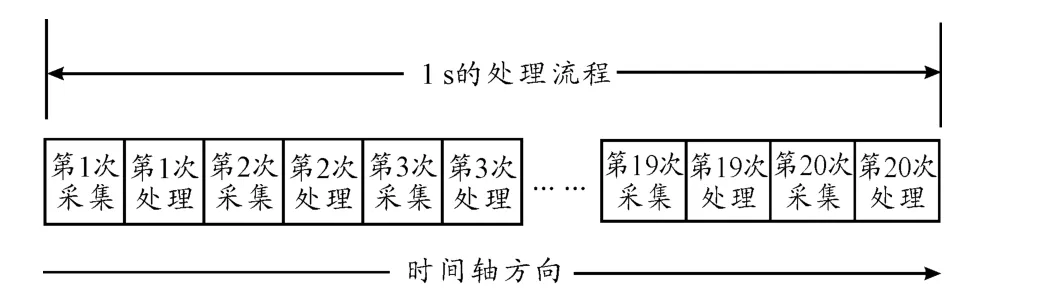
图3 1 s内采集处理时间片分配示意图
2.1 动态背景建立
在进行当前时刻的处理时,实际上在系统中存储了该时刻之前10次的采集结果,该10帧的结果可以用于背景的建立。每时刻采集完成后首先进行三角波调制信号的提取,根据FMCW信号的测速原理,可以得到该时刻的环境中是否存在运动目标。当测速结果显示没有运动目标时,则将存储的10帧数据(不包含本时刻的数据)按照距离点求出每点的期望,由此得到当前时刻的参考背景,同时使用这些数据进行各点的方差计算,用以反映背景中各点的起伏趋势。如果布防区域内始终没有运动目标,则一直使用当前时刻之前的10帧数据进行背景建立,形成动态背景。
2.2 背景的使用
一旦布防区域内出现目标,并假设运动目标进入布防区域,会在防区内存在至少1 s的时间,依据上述的设计,共会进行20次有效目标的判定。FMCW信号测速过程会及时且无漏的反映出目标入侵的情况,由于有目标的介入,背景会出现较大的变化,故此时需要立刻停止背景的刷新,系统中锁存无目标时的最后一组10帧数据。对于动目标检测的处理过程,使用的是无目标情况下建立的最后一次背景,确保在目标检测时使用的是最真实的背景,以提高检测效果。

图4 全系统流程
2.3 方差与门限
由于安防作用环境较为复杂,背景中可能包含了诸如钢网、防爬网、树木、墙壁等具有较强反射能力的物体,当目标进入防区时,除目标出现点会有回波能量增强外,因多径反射、目标重叠等影响,一些不确定位置的能量也会增加,如图5所示。
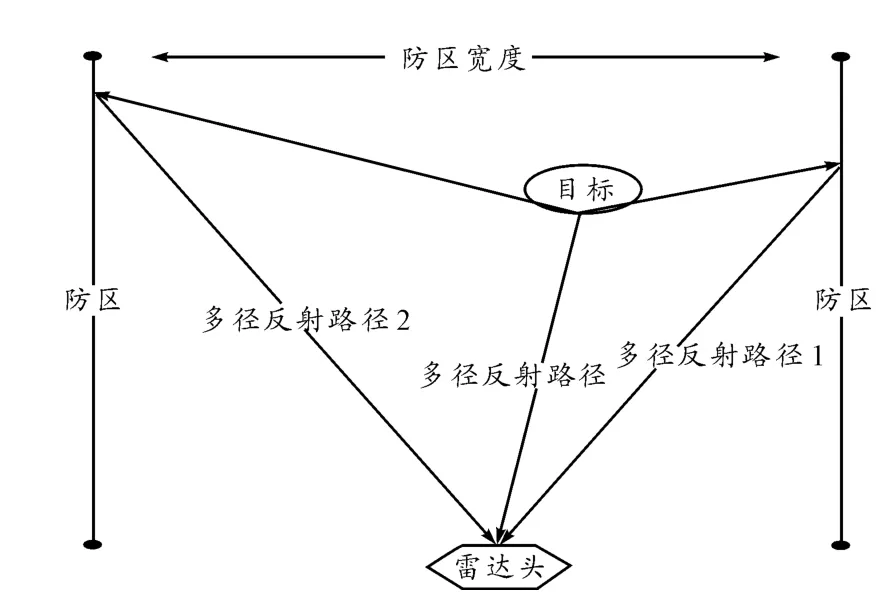
图5 多径反射后回波的可能性示意图
若该影响明显,则会出现目标距离模糊,如图6所示,目标出现在L2位置,但是由于多径和叠加导致L1和L3位置的幅值与L2的幅值达到同一量级,则无法区分目标和杂波。
选择使用存储10帧数据计算得到的方差作为参考可以有效解决这一问题,在没有运动目标时计算得到的方差可以反映出环境背景中多径和叠加的可能性,以动态的方差结果作为指导,可以准确划出门限的趋势,在当前一帧数据和背景数据进行比较时,可以通过对应点做除的方法进行,即用当前一帧数据除以对应的背景数据,有目标的位置得到的除结果会明显大于其他各点,若由于多径和叠加导致某点除结果与目标点位置的结果达到同一数量级,则该点的统计方差也一定较大,对于方差大的点,其判别除结果的门限值则需相应提高,如图7所示,由此就减小了错报的概率。

图6 有无目标情况下的幅值比较示意图

图7 背景方差指导产生门限趋势示意图
2.4 恢复背景建立
当动目标始终在防区内运动时,防区中的多普勒频率就一直不会为零,2.2小节中的处理过程也会反复执行。而当目标从防区内移出后,多普勒频率会降至零,或微弱的运动物体不再触发多普勒信息报警,此时系统重新进入动态背景刷新过程,以备下一次动目标入侵时检测所用。
3 与现有技术相比的创新
本文提供的背景建立过程使用了当前检测时刻附近的一个有效时间段内的背景信息,能够真实和准确的反映在无目标时的背景情况,解决了因为背景建立固定而出现的环境过期问题。
背景建立中以多普勒信息为判定依据,当环境内的多普勒频率信息为零时,则一直解算和刷新背景,而当环境内的多普勒频率信息不为零时,则选择暂时停止背景更新,有效的保证了目标检测处理时背景的时效性。
这种方法免去了常规安防雷达中需要开机学习数分钟的过程,使用本方法的雷达根据选择有效时间段的长度,在开机后1~2 s内即可开始实施目标检测,简化了开关机操作过程,提高了雷达安装的运行效能。
为减小检测过程中因为背景起伏造成的影响,使用了建立背景时用到的多帧背景数据,并计算出每个距离点的方差,通过方差反映背景的起伏趋势,以指导检测门限的选择。
4 结束语
本文介绍了一种建立动态参考背景的方法,确保动目标检测时的参考背景具有较强的时效性,同时使用方差反映背景变化趋势。通过使用本文提供的方法,可以有效的提高雷达检测正确性,并且经过工程实践检验,该方法对系统改善效果明显。这种方法具有较强的普适性,虽然在民用安防领域首先进行验证和使用,但适用情况不局限于此,对于需要异常情况与常规情况进行比对的任何模型,本文建立动态参考和使用方差进行趋势预判的方法都可以被使用。
[1]胡广书.数字信号处理——理论,算法与实现[M].北京:清华大学出版社,1997.
[2]杨建宇,凌太兵,贺峻.甘MCW雷达运动目标检侧与距离速度去藕合[J].电子与信息学报,2004,26(2):169-173.
[3]刘丽华,董天临.连续波多普勒测速雷达射频前端电路设计与仿真[J].电子科技,2007(5):20-25.
[4]徐小平,刘建新,韩宇,等.FMCW测距雷达数字信号处理器设计仿真[J].信息与电子工程,2004,2(2):133-135.
[5]Meta A,Hoogeboom P.Signal Processing Algorithms for FMCW Moving Target Indicator Synthetic Aperture Radar[C]//Proc IEEE Int Geoscience and Remote Sensing Symp.IGARSS 05.Seoul:IEEE,2005:316-319.
[6]胡汉南.线性FMCW雷达中频信号的采样准则和频谱特性[J].中国航海,2000(1):78-84.
[7]蒋宇柏,游思晴.软件无线电原理与工程应用[M].北京:机械工业出版社,2006:38-51.
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
汽车工程师(2021年12期)2022-01-17 02:29:54
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
当代陕西(2020年14期)2021-01-08 09:30:42
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
电子器件(2015年5期)2015-12-29 08:43:38
机械与电子(2014年2期)2014-02-28 02:07:47
电子设计工程(2014年8期)2014-02-27 11:57:22
