
移动闭塞列控系统集成列车定位技术
2013-09-06 03:44陈裕明
铁道通信信号 2013年10期
陈裕明
移动闭塞列控系统集成列车定位技术
陈裕明
摘 要:在分析单一的列车定位技术优缺点和不同闭塞方式列控系统列车定位要求的基础上,指出应该采用列车集成定位技术。重点介绍一个实用移动闭塞列控系统集成列车定位技术的组成、定位流程及其应用效果,说明如何应用集成技术手段,综合各单一的列车定位技术的优点,实现互补、冗余和多信息,从而使在定位精度、实时性、安全性和可靠性等方面满足移动闭塞列控系统的列车定位要求。
关键词:移动闭塞;列控系统;集成定位技术
列车定位技术在城轨交通列控系统中具有十分重要的地位,其主要作用是:①为保证列车安全间隔提供依据;②作为列车在车站停车后打开车门和屏蔽门的依据;③作为CBTC系统无线基站接续的依据;④是列车计算速度曲线和制动曲线并实施控制的主要参数;⑤是地面系统显示列车运行状态的基础信息。单一的列车定位技术显然无法满足移动闭塞列控系统的列车定位要求,必须采用集成列车定位技术。
1 几种常用列车定位技术的优缺点
1.轨道电路定位技术。优点是经济、方便、可靠性高;缺点是定位精度取决于轨道区间的长度,不精确。
2.测速定位技术。优点是技术成熟、经济、简单;缺点是存在累计误差,包括车轮“空转”、“打滑”和“磨耗”等的误差。在定位精度要求较高时,需要用其他方法不断校正其位置信息。
3.多普勒雷达定位技术。优点是消除了车轮“空转”和“打滑”误差;缺点是仍存在累计误差。在定位精度要求较高时,需要用其他方法不断修正。
4.查询应答器定位技术。优点是在应答器安装点定位精度高,维护费用低,使用寿命长,且在恶劣环境条件下工作稳定;缺点是只能给出点式定位信息。
5.电缆环线定位技术。优点是比较简单、费用较低;缺点是定位精度取决于交叉区间的长度,不精确。
2 不同闭塞方式列控系统列车定位要求
1.固定闭塞方式。列控系统采用分级速度控制模式,运行列车安全间隔是若干闭塞分区。固定闭塞的追踪目标点为前行列车所占用闭塞分区的始端,后续列车从最高速开始制动的起点为要求减速的闭塞分区的始端,列车追踪运行间隔比较大。列车根据收到的分级速度信息运行,对列车定位要求较低,一般采用模拟轨道电路定位技术就可满足系统的列车定位要求。
2.准移动闭塞。列控系统采用目标距离控制模式 (又称连续式一次速度控制)。它根据目标距离、目标速度及列车本身的性能确定列车制动曲线,不设定每个闭塞分区的速度等级,采用一次制动方式。准移动闭塞的追踪目标点为前行列车所占用闭塞分区的始端,而后续列车从最
高速开始制动的起点是动态计算确定的,列车追踪运行间隔比固定闭塞小一些。由于车载设备需要根据本列车自身的实时位
置和速度,以及地面轨旁设备的移动授权,动态计算列车运行速度曲线和制动曲线并控制列车运行;地面轨旁设备需要跟踪网络中各列车的位置,并将其发送给网络中相应后续列车和系统控制中心;因此,准移动闭塞列控系统对列车定位精度、实时性、安全性和可靠性要求较高,必须集成若干单一的列车定位技术,才能满足系统的列车定位要求。
3.移动闭塞。移动闭塞列控系统与准移动闭塞列控系统一样,也采用目标距离控制模式。但移动闭塞不划分物理闭塞分区,而是采用虚拟闭赛分区。列车的长度加上其最大的制动距离,并在列车后方加上一定防护距离,便组成了一个与列车同步移动的虚拟闭塞分区。移动闭塞追踪目标点为前行列车所占用,并随前行列车同步移动的虚拟闭塞分区的始端,即前行列车的尾部 (加上一定防护距离),而后续列车从最高速开始制动的起点是动态计算确定的,列车追踪运行间隔要比准移动闭塞更小一些,如图1所示。由于车载设备需要根据本列车自身的实时位置和速度,以及地面轨旁设备的移动授权,动态计算列车运行速度曲线和制动曲线并控制列车运行,同时将列车自身的实时位置和速度报告地面轨旁设备,地面轨旁设备需要根据网络中各列车的实时位置和速度,不断计算各列车的移动授权,并连同前行列车的实时位置和速度一同发送给相应后续列车和系统控制中心,因此,移动闭塞列控系统对列车定位精度、实时性、安全性和可靠性要求更高。必须根据自身系统的特点,集成若干单一的列车定位技术,才能满足系统的列车定位要求。
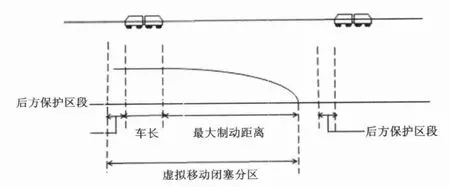
图1 移动闭塞列车距离控制示意图
3 移动闭塞列控系统集成列车定位技术
从以上分析可以看出,每项单一的列车定位技术都有其优点,也存在自身难以克服的缺点。另外还存在若自身出现故障会导致整个系统无法正常工作的风险。因此,单一列车定位技术无法在定位精度、实时性、安全性和可靠性等方面完全满足移动闭塞列控系统的列车定位需要。在实际运用中,必须根据自身系统的要求和特点,采用集成列车定位技术才能满足系统列车定位要求。
下面重点分析移动闭塞列控系统集成列车定位技术的组成、定位流程和应用效果,说明如何通过集成技术手段,综合各单一的列车定位技术的优点,克服其缺点,实现互补、冗余和多信息,满足移动闭塞列控系统的列车定位要求。
3.1 组成
在车-地双向连续通信环境的支持下,一个用于移动闭塞列控系统集成列车定位技术由以下3种单一的定位技术组成:①查询应答器定位技术,用于列车位置距离同步化;②测速定位技术,用于应答器间列车位移、速度测量和方向识别;③多普勒雷达定位技术,用于应答器间列车位移、速度测量。
3.2 定位流程
1.列车未定位。车载设备启动,列车开始运行,但列车未定位。此时列车的位移距离和速度由测速电机和多普勒雷达组合连续测量。
2.列车初定位。车载计算机单元的线路数据库中储存有安装在线路上各应答器的编码和位置(应答器安装中心点与线路参考点的距离),一旦列车连续经过2个应答器,便初始化了列车的位置参数,完成列车初定位。详细过程如下。
列车经过第1个应答器瞬间,车载设备应答器天线向应答器发送能量电磁波,激发该应答器立即向车载设备应答器天线发送事先储存在应答器中,包括该应答器编码在内的应答器报文;车载设备计算机单元通过解调,并比较该报文中的应答器编码和其线路数据库中储存的应答器编码,对列车的位置进行初始化。但此时列车不知道它在线路上的运行方向。
列车经过第2个应答器瞬间 (过程同上),车载设备计算机单元通过解调,并比较报文中应答器编码的顺序和其线路数据库中储存的应答器编码顺序,确定它在线路上的运行方向,完成列车初始化定位。
3.位移和速度测量。已定位列车在2个应答器间的位移和速度由测速电机和多普勒雷达组合连续测量,并经车载设备计算机单元评估,不断更新列车实时位置和速度。2种测量传感器的结合并通过车载计算机单元评估,实现了传感器的优势互补和冗余,不但消除了由于车轮“空转”、 “打滑”和“磨耗”所带来的位移和速度测量的误差,提高了测量精度,而且提高了列车定位的可靠性。
4.位置距离同步化。已定位列车每经过一个应答器时,列车位置距离同步化,即将列车此时位置调整为该应答器与线路参考点的距离,从而消除了测速电机和多普勒雷达在2个应答器间位移测量的累计误差,进一步提高了测量精度 (达到应答器安装精度)。
5.定位信息传输。通过车-地双向连续通信,在线路上运行的所有列车不断将本列车的实时位置和速度报告地面控制系统,地面控制系统不断评估各列车的进路,并将移动授权和前行列车的实时位置和速度发送给相应后续列车和系统控制中心。就这样,地面控制系统知道在线路上运行的所有列车的实时位置和速度;在线路上运行的所有列车不但知道自身的实时位置和速度,而且同时知道其前行列车的实时位置和速度,从而为列控系统提供精确的、实时的、安全的、可靠的列车定位信息,保证列车安全、高效和平稳运行。
4 应用效果
上述移动闭塞列控系统集成列车定位技术,在广州、北京、南京等城市地铁的应用中,证明完全满足列控系统对列车运行进行监督、控制和安全防护的列车定位要求。该系统的设计最小列车追踪运行间隔为 90 s,运营停车点自动停车精度:±0.25 m内为99.95%; ±0.5 m内为99.9998%。在多年的运营实践中,完全达到了上述设计指标要求。
[1]傅世善.铁路信号论文集-闭塞与列控概论-第一讲区间闭塞[M].北京:中国铁道出版社,2012.
Abstract:In this article,the advantages and disadvantages of individual train positioning technology and the train positioning requirement of train control systems with different block modes are briefed.Furthermore,it is pointed out that the integrated train positioning technology should be adopted.It focuses on the composition,positioning process and application effects of a practical train positioning of train control system with moving block and explains how to use integrated technical means to combine the advantages of individual train positioning technologies,which can achieve complementarities,redundancy and multiple data for attaining desired positioning preciseness,realtimeness,safety and reliability of train positioning of the train control system with moving block.
Key words:Moving block;Train control system;Integrated positioning technology
陈裕明:西门子信号有限公司 工程师 710016 西安
2013-07-03
(责任编辑:温志红)
