针对驾驶员疲劳状态的防撞报警算法的研究*
2013-09-03 10:06李家文
汽车工程 2013年6期
李家文,成 波
(1.浙江工业大学机械工程学院,杭州 310014; 2.清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
在实际驾驶过程中驾驶员经常会处于疲劳状态[1],它影响驾驶员的反应和信息处理等能力[2]。目前常用的防撞算法,如安全距离算法(safety distance algorithm,SDA)、碰撞时间(time to collision,TTC)等,都是根据驾驶员在正常的危险感知状态下进行设计的,未考虑疲劳状态对防撞报警算法的影响,能否对疲劳状态下的驾驶员进行有效的防撞报警还有待进一步的研究和分析。
本文中利用驾驶模拟器,研究了驾驶员处于不同疲劳状态时常用防撞报警时机的报警效果和对交通危险的感知变化特性,指出了目前防撞算法所存在的问题,并提出一种面向驾驶员不同疲劳状态的防撞报警算法,实验验证的结果表明,该算法能为不同疲劳状态的驾驶员提供适应式的报警时机,提高了防撞报警的效果。
1 研究方法
1.1 疲劳状态评价
面向驾驶员疲劳状态的防撞报警须实时获取驾驶员的疲劳状态,本文中采用对驾驶员面部表情评分的方法来实时获取驾驶员的实际疲劳状态。研究过程中,利用安装于驾驶员前方的摄像头实时采集驾驶员的面部视频图像。由两名经过专门训练的研究人员按照表1所示的评分标准独立给出各自的评分,评价时将驾驶员的状态分为清醒、疲劳和非常疲劳3级,取两人评分结果的平均值作为最终结果。
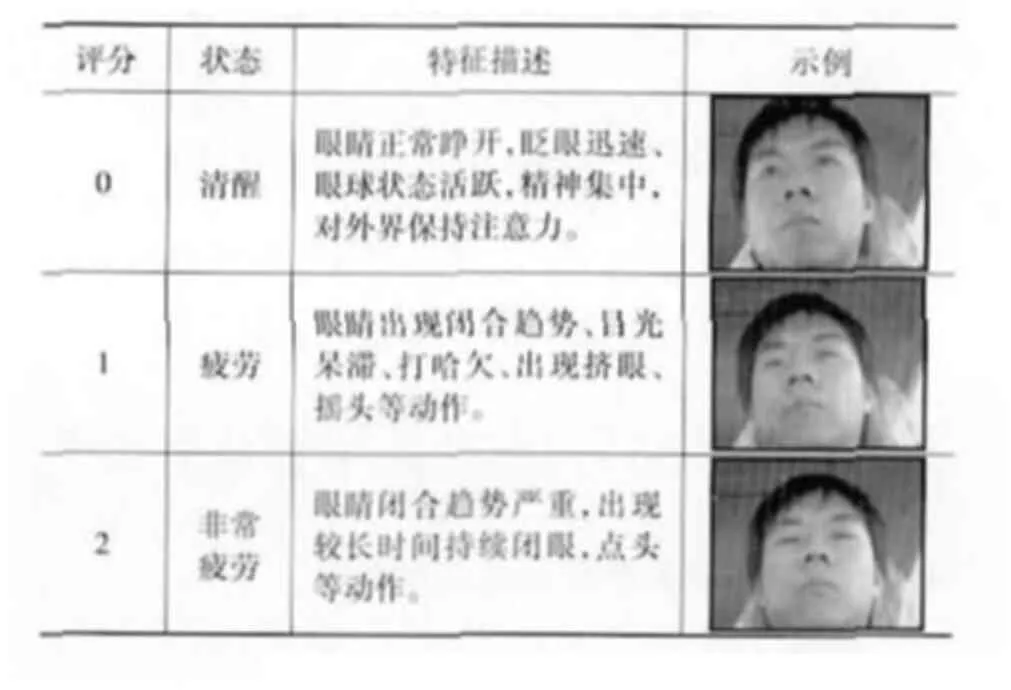
表1 疲劳状态评价指标
1.2 防撞算法
为分析驾驶员在不同疲劳状态下对防撞报警的需求,首先测试了目前常用的一些报警算法在驾驶员处于不同疲劳状态时的效果。主要包括Mazda算法[3]、Honda算法[4]和 TTC 算法。由于 Mazda算法中有驾驶员反应时间的计算项,本文中根据驾驶员在不同疲劳状态下对听觉报警方式反应时间的差异[5],将其反应时间项做相应修改后作为新的两种报警时机,目的是为了分析防撞算法是否可通过调整其反应时间来适应驾驶员疲劳状态的变化。
本文中采用6种防撞算法:Mw代表Mazda算法,Hw代表 Honda算法,TTC4和 TTC5算法,Mw(T1)和Mw(T2)则代表改变反应时间项后的Mazda算法,其中T1表示反应时间按照疲劳状态和清醒状态的差异进行修改,T2表示反应时间按照非常疲劳状态和清醒状态的差异进行修改。
1.3 评价方法
在系统报警时,过晚的报警会使驾驶员紧张,过早的报警则可能使驾驶员觉得烦扰。因此驾驶员对报警时机的态度是评价防撞算法是否有效的重要指标[6]。另外从人的信息加工过程来看,驾驶员对报警时机是否合适的评价主要源于其对当前危险程度的感知结果[7]。为了进一步设计能适应不同疲劳状态的防撞报警算法,还研究了不同疲劳状态的驾驶员在面对不同交通状况时的危险感。
具体的评价步骤如下:首先由驾驶员在不同疲劳状态下,采用7分量表的形式(表2),对6种防撞算法报警时机是否合适进行主观评价;接着,为消除驾驶员之间经验差异的影响,利用ME(magnitude estimation)法[8]来比较驾驶员危险感知的结果,即基于一个制定好的前向危险标准,让不同疲劳状态的驾驶员在各种算法报警时,对前向交通危险的情况和该标准进行对比评价;最后利用数值拟合等方法量化驾驶员的主观评价和客观危险之间的关系。

表2 报警时机主观评分量表
1.4 研究条件
实验中被试者在驾驶模拟器上分别以60、90和110km/h的车速在一条全长50km的高速公路上行驶。由于实际驾驶过程中影响驾驶员前向危险感知的工况很多,本文中主要针对较为常见的接近工况进行研究,自车以不同的车速接近前车(前车以40km/h的车速行驶),当各算法的阈值被触发时,驾驶模拟器的音响系统发出报警的嘟嘟声。
实验开始后,被试者先以60km/h的车速保持在中间车道行驶并接近前车,当触发报警后进行制动。在此过程中,被试者按照表2对该报警时机进行评价,同时基于ME法评价当时的交通危险状况和标准状况之间的比较结果;重复上述步骤,直到完成对所有危险报警算法的测试。在该过程中,两名有经验的实验研究人员实时监视被试者的面部视频,评价其疲劳状态,并确保被试者在所有状态下都对6种防撞算法进行评价。在上述过程完成之后,停止实验,被试者休息10~20min恢复状态,然后再分别以90和110km/h的车速重复上述实验。
2 研究结果
2.1 不同疲劳状态驾驶员的报警时机需求结果
图1是被试者以60km/h的车速行驶时,在不同疲劳状态下对6种防撞算法的主观评价结果。其中横坐标表示6种报警时机所属的防撞算法及其触发报警时相应的TTC值,纵坐标表示报警时机的评价结果。由图可见,随着疲劳程度的加深,被试者对报警时机的评价逐渐下降,即驾驶员越疲劳就越感到报警时机来得较晚。驾驶员在90和110km/h的车速下得到的结果和上述类似。由此可见,不同疲劳状态的驾驶员所需要的报警时机不同。随着疲劳程度的加深,防撞算法须适当地提前报警,以保证报警时机的有效性。
而从更改了反应时间项的Mazda算法的评价结果来看,反应时间的调整虽然达到了提早报警时机的目的,但无法有效适应驾驶员在不同疲劳状态下对报警时机的实际需求。例如清醒状态时Mw算法的报警时机为稍早,趋向于合适。但在根据状态的变化增加反应时间项的值后,其最终的评价趋于偏早,偏离了合适的报警时机。
2.2 危险感知结果的比较
图2是被试者以60km/h的车速行驶时,在不同疲劳状态下对不同报警时机的交通危险感觉和设定好的标准工况进行比较后得到的结果。其中横坐标表示各种报警时机及其报警时的TTC值;纵坐标表示危险感的ME值(危险比较倍数,其中1代表设定的标准工况的ME值)。由图2可见,不同疲劳状态的驾驶员在面对各种交通危险状况时,其危险感体现出以下两种变化趋势:
(1)无论在何种疲劳状态下,随着报警时机逐渐提早(TTC值越来越大),危险感也逐渐降低;
(2)随着疲劳状态的加深,驾驶员对相同报警时机的危险感都加重,体现出一个上升的趋势。
驾驶员在90和110km/h车速下得到的结果也和上述类似。
上述结果表明驾驶员在不同疲劳状态下对危险状况的态度变化是造成其对防撞算法报警时机评价差异的根本原因。因此在研究适应不同疲劳状态的防撞算法时,应从驾驶员对危险感知的结果入手,重点解决以下两个方面的问题:(1)驾驶员的危险感和不同报警时机之间的关系;(2)驾驶员的危险感在不同疲劳状态下的变化特征。通过对这两种关系的分析和把握,以驾驶员的危险感为桥梁建立其不同疲劳状态和报警时机之间的联系,从而设计适应于驾驶员不同疲劳状态的防撞报警算法。
3 疲劳状态适应式防撞报警算法设计
3.1 危险感和报警时机之间的关系
根据上述ME法的评价结果,利用Stevens幂定律方法[9]来量化驾驶员在清醒状态时的危险感主观评价和客观的报警时机之间的关系:
式中:P代表危险感,k和m分别为幂函数的系数和指数。量化得到驾驶员的危险感和报警时机之间的关系为
3.2 危险感和不同疲劳状态之间的关系
考虑到驾驶员自身经验和偏好等影响,以及事物中存在的聚类规律,本文中采用模糊C-均值聚类分析的方法,对不同疲劳状态下驾驶员的危险感知结果进行研究,分析了在相同危险条件下,由于驾驶员疲劳状态的变化对其危险感知结果的影响规律。
图3(a)为将不同车速下的各种报警时机以及各报警时机下得到的危险感比较结果作为聚类样本,以聚类数为3进行聚类后的实际结果。图中不同的方块点是得到的聚类中心,外侧的椭圆则代表了该类所包含的聚类样本范围。可用相对清晰的图3(b)来表达驾驶员在各个类别下,危险感随疲劳程度的加深而发生的变化。将该变化用图4进行量化表示,其中“非常疲劳/清醒”表示非常疲劳状态下危险感和清醒状态危险感的比值,“疲劳/清醒”表示疲劳状态下危险感和清醒状态危险感的比值。
由图4可见,在相近的报警时机下,驾驶员在不同疲劳状态下的危险感发生了明显变化,疲劳状态下的危险感约为清醒状态下的1.2倍;非常疲劳状态下的危险感约为清醒状态下的1.3倍。该结果可表示为
式中:P0为驾驶员清醒状态时的危险感,P1和P2分别为驾驶员疲劳状态和非常疲劳状态时的危险感。
3.3 适应于驾驶员不同疲劳状态的防撞报警算法
结合3.1和3.2节的结果,得到了以驾驶员的危险感为控制指标,适应于不同疲劳状态的防撞报警时机的调节算法:
式中N=0、1和2分别代表驾驶员的清醒、疲劳和非常疲劳状态。如果PN≥1,则系统触发危险报警。
在驾驶模拟器上基于表2的评价量表对该算法进行了验证,结果如图5所示。其中横轴的3种报警时机是疲劳状态适应式报警算法根据驾驶员的清醒、疲劳和非常疲劳状态自动调节的报警时机。由图5可见,无论是在疲劳还是在非常疲劳状态时,被试者对按其实际疲劳状态调整的报警时机的评价结果(图中圆圈处)都接近“合适”。由此可见,所提出的根据驾驶员疲劳状态自适应调整报警时机的危险报警算法能够保证对不同状态下的驾驶员进行适时的报警,达到了预期的目标。
4 结论
利用驾驶模拟器研究分析了驾驶员处于不同疲劳状态时常用防撞算法的实际效果和危险感知特性的变化情况。结果表明,随着驾驶员疲劳程度的加深,防撞报警算法须适当地提早报警时机,同时报警时机须符合驾驶员在不同疲劳状态下对交通危险的感知结果。在此基础上,建立了一种以人的危险感为控制指标的疲劳状态适应式的防撞报警算法,实验验证的结果表明,该算法能为不同疲劳状态的驾驶员提供适应式的报警时机,提高了防撞报警系统在驾驶员处于不同疲劳状态时的报警效果。
[1]胡兴军.瞌睡:交通安全的大敌[J].湖南农机,2004(2).
[2]Smith S S,Horswill M S,Chambers B,et al.Hazard Perception in Novice and Experienced Drivers:The Effects of Sleepiness[J].Accident Analysis & Prevention,2009,41:729-733.
[3]Doi A,Butsuen T,Niibe T,et al.Development of a Rear-End Collision Avoidance System with Automatic Braking Control[J].JSAE Review,1994,15(4):335-340.
[4]Fujita Y,Akuzawa K,Sato M.Radar Brake System[C].1995 Annual Meeting of ITS America,Washington,D.C.,March 1995,Vol.1:95-101.
[5]李家文,成波.驾驶员疲劳状态适应式报警方法的研究[J].汽车工程,2011,33(8):694-700.
[6]Campbell J L,Richard C M,Brown J L,et al.Crash Warning System Interfaces:Human Factors Insights and Lessons Learned[R].US DOT Technical Report,HS DOT 810697.2007.
[7]Heikki Summala.Acceident Risk and Driver Behaviour[J].Safety Science,1996,22(1-2):103-117.
[8]Stevens S S.Psychophysics:Introduction to its Perceptual,Neural,and Social Prospects[M].New York:John Wiley & Sons,1975.
[9]Stevens S S.On the Psychophysical Law[J].Psychological Review,1957,64:153-181.
猜你喜欢
汽车实用技术(2021年9期)2021-05-26
共产党员(辽宁)(2019年7期)2019-11-18
共产党员·上(2019年4期)2019-04-26
汽车工程师(2018年1期)2018-07-13
海峡姐妹(2017年12期)2018-01-31
东方教育(2017年17期)2017-10-31
环球时报(2017-08-18)2017-08-18
运动(2016年7期)2016-12-01
奥秘(2016年3期)2016-03-23
汽车零部件(2015年8期)2015-06-23