
削弱磁通反向式电机齿槽转矩的有效方法
2013-09-01 02:15:30石有计
电气技术 2013年9期
石有计
(铁岭师范高等专科学校,辽宁 铁岭 112000)
磁通反向式电机(FRM)属于一种新型无刷双凸极永磁电机,其定子和转子都采用凸极结构,定子凸极上粘贴两块充磁方向相反的永磁体,同时定子上装有集中绕组,转子上无绕组由硅钢片叠压而成。FRM电机具有明显的永磁电机特性和双凸极特性,也就是即具有开关磁阻电机的优点同时也具有永磁无刷直流电机的优点。该电机绕组利用率高,容错性好,单位体积出力大,控制灵活,电感小,因而电气时间常数相对较小。同时,定子集中绕组中的磁通呈双极性变化,功率密度较高。鉴于这些优点,FRM的应用前景非常看好。由于磁通反向式电机自身的双凸极结构以及定子上安放了永磁体,导致其齿槽转矩相对较大,它会使转矩产生波动,引起振动和噪声,对FRM电机运行性能有很大影响。必须设法有效的减小齿槽转矩。本文基于有限元分析方法,结合磁通反向式电机的结构特点,总结出几种比较行之有效的削弱FRM电机齿槽转矩的方法。
1 齿槽转矩的产生机理及计算方法
在磁通反向式电机中,随着转子的旋转,转子凸极与定子上的永磁体之间的位置不断发生变化,在旋转过程中,若某转子凸极轴线同某定子凸极轴线重合时, 闭合磁路的磁阻达到最小值,此处称之为平衡位置。当转子转过该处后,凸极下磁阻将发生变化,整个磁路磁阻将变大, 这相当于减小磁路中的截面积,造成永磁体产生的磁场扭斜, 于是永磁磁场和转子齿产生相互作用力, 该作用力的切向分量形成齿槽转矩。齿槽转矩相对于转子位置呈周期性变化,由于FRM电机采用双凸极结构,所以它产生的齿槽转矩比较大,引起转矩和转速波动,使其产生振动和噪声。齿槽转矩可以通过磁共能相对于转子位置的导数而计算得出,即

2 削弱齿槽转矩的有效方法
2.1 转子斜极法
FRM斜极前后的齿槽转矩如图1所示。通过理论分析及电磁场有限元分析结果可知,齿槽转矩对电机平均转矩没有影响,但它的变化具有周期性,在一个周期内,转矩曲线相对于横坐标轴左右反对称,当转子倾斜角度等于一个齿槽转矩周期对应的机械角度时,齿槽转矩为零,但这样会使得电机感应反电动势显著减小,为了减小对电动机的感应电动势和输出能力的影响,转子斜极角度设为定子极宽的一半,即为θskew=θr/2,对于6/8极电机,转子的极弧 16º,转子斜极的机械角度为 8º。斜极后电机齿槽转矩显著减小,如图1所示,只有削弱前的30%左右。但缺点是在消除电机齿槽转矩同时,电机单位体积出力下降。

图1 FRM斜极前后的齿槽转矩
2.2 转子齿极宽窄成对但不均匀安置法
采用此种方法,将转子设计成图2所示的结构。研究 6/8极磁通反向电机齿槽转矩,转子上正对的两极一宽一窄,宽极的宽度为 22°,窄极的宽度为16°。经过有限元分析研究发现,宽齿极和窄齿极的齿槽转矩波形相似,并且幅度相当,但变化趋势刚好相反。也就是两者受到的齿槽转矩方向不一致,一个是顺时针方向,则另一个就为逆时针方向,这样叠加后的齿槽转矩将大部分互相抵消。齿槽转矩如图 3所示。可以看出,采用转子齿极极宽为 16°一种齿极时,齿槽转矩较大,而采用宽窄成对的转子齿极时齿槽转矩比较小。这种方法缺点是转子齿形不对称,转子的重心与其轴线中心不重合,由于电机气隙很小,在电机高速旋转时有扫膛的隐患。

图2 转子齿极宽窄成对的转子结构图

图3 磁通反向电机的大小齿成对时的齿槽转矩
2.3 转子分段法
采用转子分段方法,保持定子各凸极极弧为45°不变,不改变定子其它参数,转子结构设计成如图4所示。将转子铁心沿轴线方向分为三段,每段的极宽是不同的。转子两端各占总长的 1/4,中间段占总长的 1/2,两端采用矩形凸极,极弧为14°,中间段采用扇形凸极,极弧为24°。由有限元分析表明,转子采用矩形凸极的齿槽转矩曲线和采用扇形凸极的齿槽转矩曲线相比较,波形非常相似,变化趋势也大致相反。因此,将同样长度的两种转子同轴连在一起,叠加的结果由于大部分抵消使得齿槽转矩变得很小。其各个齿槽转矩曲线及其合成转矩曲线如图5所示。从计算结果可知,采用转子分段法对削弱齿槽转矩非常有效,一般能将齿槽脉动转矩削弱到低于原来值的1/4以上。取得了比较好的效果,不足之处是转子需要两种几何尺寸的冲片。

图4 转子分段法
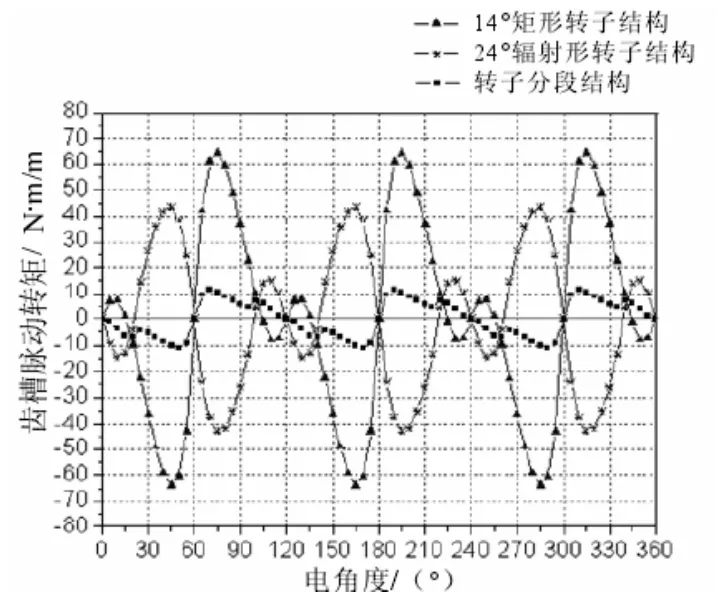
图5 转子分段法电机脉动转矩的合成
2.4 定子极弧宽窄成对加转子分段法
采用定子极宽窄成对加转子分段法时的定子和转子结构示意图如图6所示。定子上的宽齿极(极弧为45°)和的窄齿极(极弧为42°)在空间上相间分布,且成对出现。转子的结构和图4一样,沿轴线方向三段转子铁心,分别占总长的1/4、1/2、1/4。两端采用矩形凸极,极弧为 16°,中间段采用扇形凸极,极弧为 24°。采用这种方法后,经过有限元分析,齿槽转矩如图7所示。由分析计算结果可知,42°极弧定子16°矩形转子的电机和45°极弧定子24°矩形转子的电机齿槽转矩变化趋势相反。叠加的结果因大部分抵消而使齿槽转矩变得很小。该法能很好的削弱齿槽转矩,能够将齿槽转矩减小到不足原来值的1/6,电机的感应反电动势仅有微弱的减小。同时产生的感应电动势曲线更理想,该方法的缺点是转子需要两种几何尺寸的冲片。

图6 定子极宽窄成对加转子分段时的电机结构示意图

图7 定子极宽窄成对加转子分段法齿槽转矩的合成
2.5 转子凸极大小齿相间布置同时分段法
采用该方法时保持电机的定子各凸极极弧为45°不变,转子截面如图8(a)所示,转子具有两种齿形,窄齿12°、宽齿 24°,它们间隔出现。相对的两个转子齿大小相同。转子铁心分为长度相等的两段,前段的大齿对着后段的小齿,即两段空间错开一个转子齿距的结构,如图8(b)所示。经有限元分析计算,前段转子铁心的齿槽转矩曲线和后段转子铁心的齿槽转矩曲线比较,相差半个周期,波形相似,幅度接近,变化趋势相反,所以叠加后齿槽转矩基本抵消。齿槽转矩的削弱效果如图9所示。削弱后的齿槽转矩幅值只有转子齿为16°时齿槽转矩的1/6,这种方法十分有效,但不足之处是在削弱齿槽转矩的同时,电机力能特性降低近10%。
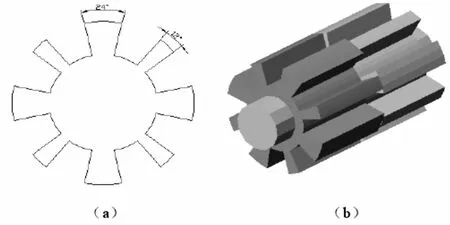
图8 转子大小齿间隔加分段的转子结构示意图

图9 转子大小齿间隔加分段时齿槽转矩削弱效果
3 结论
削弱齿槽转矩是设计FRM电机时必须考虑的重要因素之一。实际应用时要综合考虑,力求抑制齿槽转矩的效果最好,又尽可能小的影响电机的力能指标,同时还要考虑加工工艺的难易程度。本文介绍的几种削弱齿槽转矩的方法,具有削弱齿槽转矩效果好,对电机的力能指标影响最小,并且工艺简单实施容易,易于电机的制造生产,在实际应用中依照具体情况选用合适的削弱方法。
[1] KIM T H, LEE J.A Study of the Design for the fluxreversal machine[J].IEEE Transactions on Magnetics,2004, 40(4): 2053-2055.
[2] KIM Y S, KIM T H, KIM Y T, et al.Various design techniques to reduce cogging torque in flux-reversal machines[C].The Eighth International Conference on Electrical Machines and Systems, September 27-29,2005,Nanjing, China, 2005, 1: 258-260.
[3] 沈勇环,陈益广,赵维友.削弱反磁通电机齿槽转矩的两种新方法[J].电工技术学报, 2007, 22(7): 141-144.
[4] 郭亮,卢瑟芬,叶云岳,李光友.基于有限元方法的磁通反向电机定位转矩研究[J].电工电能新技术,2006,25(2).
[5] 赵维友.磁通反向式电机齿槽转矩削弱方法的研究[D].天津大学硕士学位论文,2007.1.
[6] 寻志伟.磁通反向电机齿槽转矩的削弱及其对电磁转矩影响[D].天津大学硕士学位论文,2007.5.
[7] 赵振卫.磁通反向永磁电机的研究[D].山东大学硕士学位论文,2010.10.
[8] 朱晗.磁通反向电动机的设计与分析[D].山东大学硕士学位论文,2011.5.
[9] 汪旭东, 许孝卓, 封海潮.永磁电机齿槽转矩综合抑制方法研究现状及展望[J].微电机,2009(12).
[10] 余海阔,陈世元,彭海涛.双凸极永磁电机齿槽转矩的几种削弱方法[J].微电机,2011(1).
猜你喜欢
大电机技术(2022年2期)2022-06-05 07:28:34
防爆电机(2022年2期)2022-04-26 13:57:04
微特电机(2021年3期)2021-04-06 12:04:10
微特电机(2020年5期)2020-12-31 23:46:21
传感器与微系统(2018年7期)2018-08-29 00:44:20
科技与创新(2018年4期)2018-02-28 03:00:24
电测与仪表(2017年24期)2017-12-19 05:15:18
重型机械(2017年5期)2017-10-23 12:45:49
防爆电机(2017年1期)2017-02-09 03:14:23
电测与仪表(2015年3期)2015-04-09 11:37:52
