
取料机斗轮及隔栅下限位误动作解决措施
2013-08-25 01:40:28刘建民
设备管理与维修 2013年1期
刘建民 孙 强
作者通联:孙 强 秦皇岛港股份有限公司七公司 河北秦皇岛市海港区新开里10栋4单元3号 066000
E-mail:15903333993@163.com
秦皇岛煤四期扩容工程中,取料机的隔栅必须落到下限位斗轮才能启动,正常作业。由于隔栅下限位的反馈点直接串入斗轮启动的主回路中,因此,一旦此反馈信号断开,则斗轮就会停止。
1.原动作逻辑存在的问题
(1)当隔栅向下动作碰到下限位时,动作自动停止,但此时限位并没有压实。取料机取料作业时,由于振动较大,下限位反馈信号有时会出现瞬时误动作,斗轮会出现偷停情况。
(2)在取料机作业时,如果由于某种原因隔栅下限位误动作造成斗轮偷停,触摸屏没有故障显示,给维修人员查找故障带来很大困难。
(3)虽然隔栅下限位误动作时间很短(零点几秒),却会使斗轮偷停,影响生产顺利进行。复位后虽能继续启动斗轮作业,但如果偷停现象频繁,高压综保会报“3”启动过频繁故障,这种情况下只有等待0.5h后再启动斗轮,会严重影响到生产的正常进行。
2.解决措施
(1)对于隔栅向下动作时,没有压实限位的问题,可在PLC中将程序作相应改造。将隔栅向下动作碰到下限位就停止,改为碰到下限位后继续动1s,以保证限位压实。
先在PLC中添加图1语句,然后将图2中隔栅调整下限“RACK2:3:I.Data.1”(虚线部分)更换为“t80.DN”。
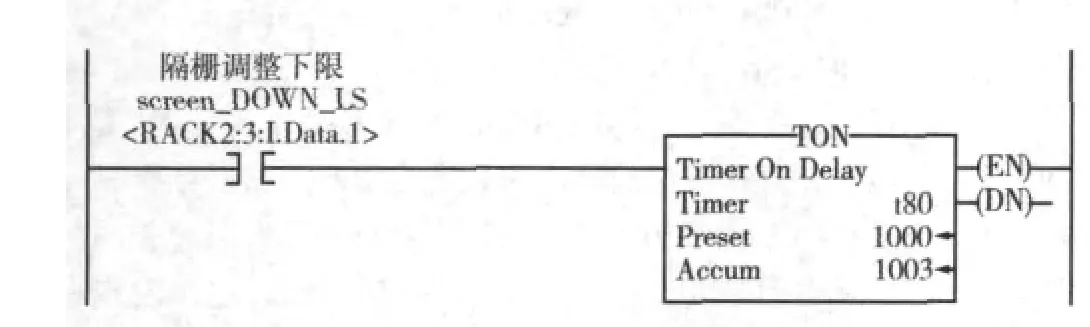
图1
(2)在PLC中把斗轮运转中隔栅下限位误动作的现象作为一种故障报出来,并在触摸屏中作相应显示模块,出现故障后司机可以快速锁定故障,方便维修人员解决。
首先在PLC中添加图3、图4语句,当斗轮运行时,如出现隔栅下限位误动情况,PLC中将故障锁住。然后将“隔栅下限位故障”显示添加到触摸屏中(图5),这样当斗轮由于隔栅下限位误动偷停时,触摸屏中就可以显示出该故障。
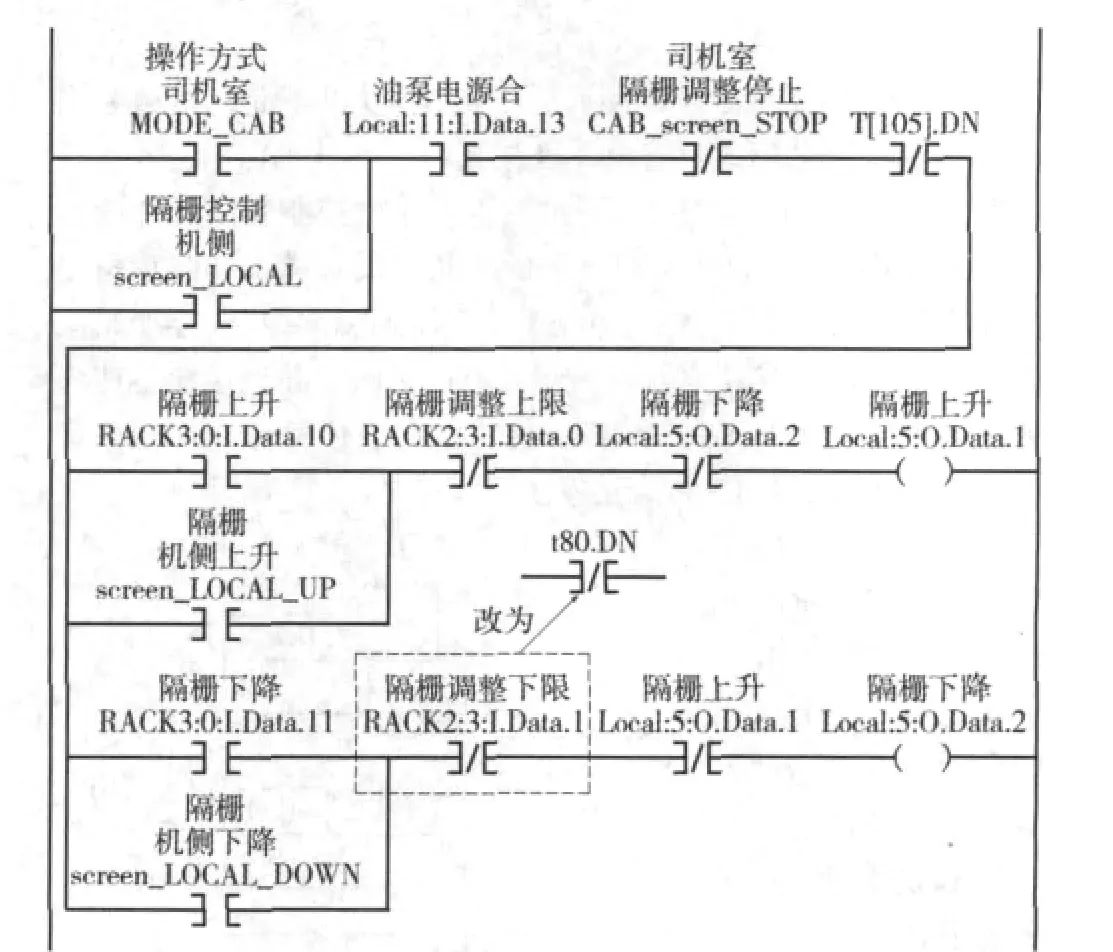
图2

图3
(3)取料机作业时由于斗轮处振动较大,隔栅下限位偶尔会出现短时的误动作(零点几秒),使斗轮偷停,影响生产顺利进行。可在PLC程序中把这种极短时间的假信号过滤掉,保证斗轮正常运转。
将原程序图6中的虚线部分改为t-yanshi2s.DN,修改完成后,可以过滤掉<2s隔栅下限位误信号,降低斗轮偷停次数,避免了斗轮的频繁启动。
改造后解决了由于隔栅下限位误动作致使斗轮偷停,严重影响生产的问题,提高了设备使用效率,保证了生产的顺利进行。

图4

图5

图6
此改造同样适用于地面导料槽下限位等和斗轮动作有联锁动作的其他机构,R91取料机的地面导料槽下限位亦用同样方法进行了改造。
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
河北电力技术(2021年2期)2021-07-29 09:16:34
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
科教导刊·电子版(2018年29期)2018-12-18 01:30:20
科教导刊·电子版(2018年32期)2018-11-24 10:40:22
猪业科学(2018年4期)2018-05-19 02:04:36
上海铁道增刊(2017年3期)2018-01-22 03:00:59
黑龙江电力(2017年1期)2017-05-17 04:25:14
设备管理与维修(2016年7期)2016-04-23 06:51:36
