
基于Simulink/Stateflow下地铁列车黏着控制的仿真研究
2013-08-15 07:46郭贵斌
电气技术 2013年7期
郭贵斌
(兰州市轨道交通有限公司,兰州 730030)
在目前都市可开发用地面积逐渐减少的趋势下,地铁以占地少、运量大、速度快、污染小、安全舒适而逐渐发展为城市交通领域最为理想的交通方式。目前,中国地铁运营线路已超过50条,线路总长度超过了1500km。中国的地铁建设取得了快速而傲人的成绩,在缓解城市交通压力方面发挥了巨大的作用。认真研究轮轨间的黏着这一自然现象,找出充分利用黏着和提高黏着系数的方法,对我国地铁列车的自主研发和车辆安全运行具有十分重要的意义。良好的黏着控制系统,可以提高列车的安全系数和对标精度,提升地铁列车服务质量,同时也能够有效提高轮轨的黏着系数,对节约能源有很大的好处。目前在我国以节能减排走可持续发展道路的前提下,研究黏着控制对环境与资源也具有重要意义。
Matlab作为一种工具在科学研究中的应用日益广泛,Stateflow是Matlab中利用有限状态机理论对事件驱动系统进行建模和仿真的可视化设计工具,它可以应用于复杂控制和监督逻辑等方面的设计,如嵌入式系统、人机界面(MMI)系统和混杂系统等。Matlab/Stateflow可以和Matlab/Simulink开发环境集成、交互,对连续/离散的混杂系统进行仿真。
1 黏着基本理论
在牵引电动机的驱动下,车轮踏面与轨面接触并产生一定塑性变形和蠕滑,钢轨对车轮施加反作用力即牵引力,轮轨接触处所能传递的最大牵引力称为黏着。
当牵引力或制动力大于最大黏着力的时候,就进入非稳定区,这时就会发生空转。黏着控制的目的是控制机车在稳定区内有效地利用最大黏着力,如果进入非稳定区,要及时改变机车的牵引力或制动力,尽快恢复轮轨间的黏着,进入黏着特性曲线的稳定区工作。

图1 黏着特性曲线
黏着控制系统中主要控制算法为组合校正法,一些常用的控制方法正交相关法、模型控制法、模糊控制方法等也大部分被采用在高速列车中。除了上述方法外,还有神经网络、GPS检测法、电流控制法等黏着控制方法。本文采用黏着控制的基本方法——基于Simulink/Stateflow下的组合校正法进行仿真研究。
2 组合校正法控制系统建模
2.1 列车动力模型
我们以广州地铁A型列车为原型建立动力模型图1中蠕滑速度和黏着系数的定义为:
以AB区间为例,由式(1)、式(4)和表1整理可得

式中,υslip表示蠕滑速度,υt表示机车速度,ωM表示车轮角速度,r表示车轮半径,μ表示黏着系数,Fμ表示轮轨间的黏着力,M表示车体的重量,g是重力加速度。从图1可以看出,黏着系数是一个非线性很强的参数,其模型可以表示成

式中参数如表1所示。

表1 黏着系数参数表

式中,Te是电机输出扭矩,J是电机传动机构的等效传动惯量,B是轴承等效摩擦阻尼,R(vslip)是机车的阻力,G是机械传动比,θ是车轮的坡度。

在广州地铁A型列车中,其基本阻力公式为


图2 列车系统仿真原理图
2.2 电机模型
目前国内城轨车辆系统除直线电机车辆外,基本上都用三相异步电动机。故本文模拟广州地铁 A型列车三相异步电动机的运行特性,其异步电动机的机械特性方程为

异步电动机的机械特性曲线如图3所示。由此可见,当角频率1ω提高时,同步转速随之提高,最大转矩减小,机械特性上移,而形状基本不变。

图3 异步电机恒压矢量控制机械特性
因此,我们可得异步电机的牵引/制动特性曲线(图4),但异步电机是一个多变量系统,电压(电流)、频率、磁通、转速相互之间又都有影响,所以是强耦合的多变量系统,输入量为电压和频率两种独立的输入量,输出变量中转矩(转速)和磁通两个变量。然而,电压、频率、磁通、转速之间又互相影响。
所以,在Simulink条件下,如果使用原动机模型,势必造成仿真运行缓慢,因此我们由异步电机牵引/制动特性曲线,通过矢量控制的基本思想搭建异步电机仿真模型(图5),实现效果是相同的。

图4 异步电机恒压矢量控制机械特性
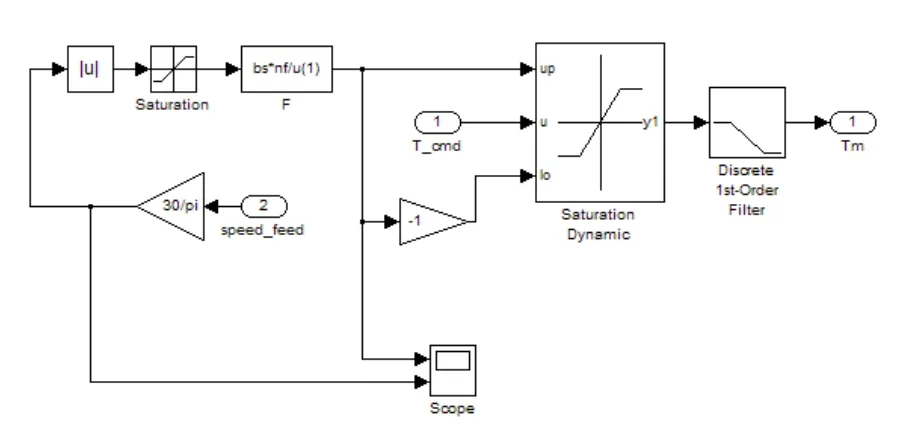
图5 电机系统仿真原理图
3 黏着控制模型
在列车控制中,黏着控制通过电机转矩指令连接着列车控制系统和电机控制系统,同时,由机车控制系统的回馈进行电机转矩调节,构成闭环控制系统,如图6所示。

图6 黏着控制系统在机车传动控制中的位置
国内常用的黏着控制主要实现控制算法为校正组合法,在校正组合法中,我们又将空转/滑行的判定分为蠕滑速度直接判定和加速度微分判定两种,集中体现在模型的搭建中,下面就两种判定方法的原理图和仿真图进行介绍。
图7所示为蠕滑直接控制系统仿真原理,将轮轴角速度转化为轮周速度,与列车运行速度求差写入Stateflow逻辑,用来判定列车空转与滑行的运动状态,继而调节电机转矩,达到黏着控制目的。
图8所示为加速度微分控制系统仿真原理,将轮轴角速度转化为轮周速度,进行一次和二次微分后写入Stateflow逻辑,通过固有的逻辑关系,对列车的空转滑行状态进行判定和分析,继而调节电机转矩,达到黏着控制目的。
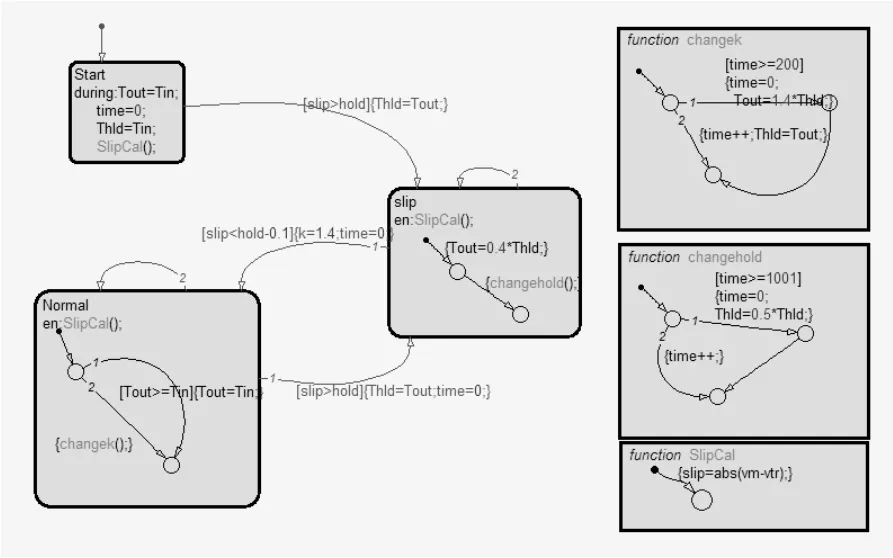
图7 Stateflow条件下蠕滑直接控制系统逻辑原理

图8 Stateflow条件下加速度控制系统逻辑原理
4 仿真分析及结果
4.1 蠕滑速度控制策略及仿真结果分析
蠕滑速度直接识别是最基本普通的方法,原理是将机车轮周速度最小值确定为基准速度;当出现空转时,通过对期望的机车加速度的积分,求得虚拟基准速度。再计算出轮周速度与基准速度的差值(蠕滑速度)及其变化率,由此识别空转现象。
但由于主动轮轨之间不是真正的纯滚动,并且所求得的速度差与列车运行速度有关,而真正的蠕滑速度与列车速度无关,并且求虚拟速度需要求积分,有时间延迟;所以根据蠕滑速度和速度差变化率来识别空转发生时,空转已比较严重,牵引力损失较多。
图9为黏着控制蠕滑速度识别下蠕滑速度与时间关系图,由图可看出黏着控制时间过长,经过长时间的调节,蠕滑速度变小直至有利于列车运行的范围内。
图10为蠕滑速度识别下电机转矩的变化与时间的关系图,与图12进行对比可以看出使用该方法进行空转识别,蠕滑速度升高后较长延时才能触发电机转矩降低。说明了直接识别方法的延时性和不可靠性。
图11为蠕滑速度识别下车速与轮周速度对比,结合前两步仿真结果的分析,通过观察可以得出,由于虚拟速度需要求积分,明显电机转矩的响应总是有时间延迟,而且响应时间过于漫长。因此,根据蠕滑速度和速度差变化率来识别空转发生时,空转已比较严重,牵引力损失较多。
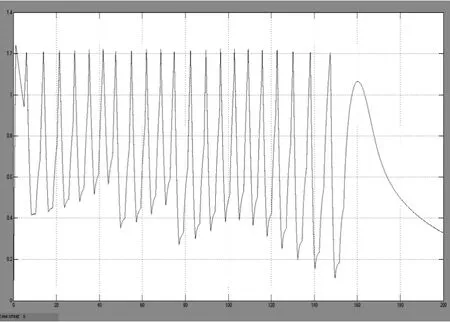
图9 蠕滑速度识别下蠕滑速度的变化

图10 蠕滑速度识别下电机转矩的变化

图11 蠕滑速度识别下车速与轮周速度对比
4.2 加速度法控制策略及仿真结果分析
针对蠕滑速度直接识别造成识别失误和判断延时等一系列问题,可以利用加速度微分进行空转识别,加速度微分基准判别空转趋势是黏着控制的发展方向。
该方法是一种基于轮周加速度和加速度微分进行空转趋势识别方法。虽然国外防空转/滑行装置也引入轮周加速度和加速度微分作为判据,但其控制输出是由速度差和加/速度对决定的,加速度微分仅作为加/减速度增加或降低的判据;另外,国外防空转/滑行装置同样涉及到基准速度,因此在所有轮对同时出现空转/滑行时,就会带来问题。
通过上述分析得知,对轮周速度的二次微分值进行正负判定,就可以识别空转趋势,及时进行转矩控制,实现优化黏着控制。
当列车出现空转趋势时,轮周加速度为

式中,Lυ为轮周速度;al为轮周加速度;M为电机驱动力矩;r为车轮半径;Fn为黏着力;J为车轮转动惯量;aC为列车加速度。对式(9)微分

通过对加速度及其微分的判断,可以识别空转/滑行趋势:
1)若加速度大于0,则有可能发生空转。
2)若轮周速度二次微分值大于0,则有空转趋势。
3)若加速度微分小于或等于0,则列车属正常加速。
4)若加速度小于0且加速度微分大于0,则有滑行趋势。
图12为加速度微分识别下蠕滑速度与时间关系图,由图可以看出蠕滑速度在列车运行后急剧增大,随后平稳下降,最后调节至有利于列车运行的范围内。
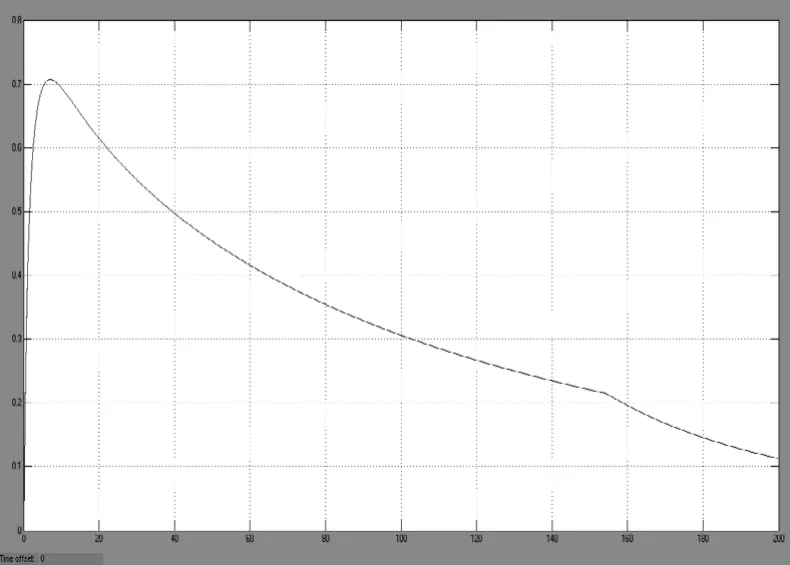
图12 加速度微分识别下蠕滑速度的变化
图13为加速度微分识别下电机转矩的变化与时间的关系图,与图15进行对比可以看出使用该方法进行空转识别,列车运行后蠕滑速度突增,电机转矩升至最大值,随后列车进入平稳运行状态。出现空转后,电机转矩变小,蠕滑速度随即降至很低。响应迅速,达到黏着控制的目的。
图14为加速度微分识别下车速与轮周速度对比图。结合前两步的仿真结果分析,可以看出,采用该空转识别方法黏着控制效果明显,响应迅速,而且延时小,控制有效。基本达到了黏着控制的目的。

图13 加速度微分识别下电机转矩的变化

图14 加速度微分识别下车速与轮周速度对比
但是由于要对轮周速度进行二次微分,因此速度中的干扰信号对二次微分值影响很大。为了消除二次微分敏感性造成空转趋势误识别,需滤除轮周加速度中的随机信号。
5 结论
本文集中通过分析国内较常用的黏着控制方法来基本实现地铁列车的黏着控制,当采用蠕滑速度直接识别和加速度微分识别的不同手段时,效果是不一样的。蠕滑速度直接识别响应较慢,控制时间过长,且准确性低,不利于列车的稳定运行。而采用加速度微分识别方法,响应快,延时小成功率高。但加速度微分识别方法也存在诸多缺点,在软件仿真的情况下这些缺点不易出现,但在现实列车模拟中则会有比较大的后果,如速度中的干扰信号对二次微分值影响很大,造成空转判别误差等现象。因此,现在国际上已经采用更为先进的模型控制法,模糊控制法及其他方法。
我国地铁车辆系统黏着控制的防空转、防滑控制装置即将经历从无到有、功能不断完善、性能不断提高的阶段。今后随着各大城市地铁系统大发展机遇的来临,我国地铁系统黏着控制的研究必将赶上并超越世界先进水平。
[1]万广.机车黏着控制技术现状与发展[J].机车电传动,l996(3):l-7.
[2]裴有福,金元生,温诗铸.轮轨黏着的影响因素及其控制措施[J].国外铁道车辆,1995, 32(2):5-11.
[3]李江红,马健,彭辉水.机车黏着控制的基本原理和方法[J].机车电传动, 2002(6):4-8.
[4]潘丽莎.广州地铁A型车车辆牵引理论简述.
[5]OHISHI K, OGAWA Y, MIYASHITA I, YANSUKAWA S. Adhesion control of eleetric motor coaeh based on force contro lusing disturbance observer[J]. IEEE Advaneed Motion Control.April 2000: 323-328.
[6]廖双晴,肖建,黄景春.机车黏着控制方法的研究现状综述[J].铁道机车车辆,2007, 27(1):39-41.
[7]邱存勇,廖双晴.电力机车粘着控制现状与展望[J].信息与电子工程,2008, 6(4):301-304.
[8]THJMOPEEBJI.机车黏着性能的改进[J].国内外内燃机, 1995(5):21-23.
[9]鲍维千.关于机车黏着的一些概念及提高机车黏着性能的措施[J].内燃机车, 1999(1):8-14.
[10]FRYLAMRK D, JOHNSSON S. Automatic slip control for railway vehicles. Master’s thesis performed in Vehicular Systems,6th February 2003.
[11]卜继玲,刘友梅.机车系统动力学仿真模型研究[J].机车电传动,2004(4):8-14.
[12]ADRIAN D, CHEOK S, SHIOMI. A fuzzy logic based anti-skid control system for railway applications.1998 Second International Conference on Knowledge-Based Intelligent EIectrOnic Systems.
[13]LUISA,MALIK E,DONALDSZ.Learning technique to train neural networks as a state section for inverter induction. Machines Using Direction Torque Control. IEEE Trans on PE, 2001,5(1):374-380.
猜你喜欢
中国设备工程(2023年2期)2023-02-13
数学物理学报(2021年2期)2021-06-09
铁道通信信号(2020年10期)2020-02-07
数学物理学报(2019年5期)2019-11-29
铁道通信信号(2019年2期)2019-03-26
中国铸造装备与技术(2017年3期)2017-06-21
广东技术师范大学学报(2016年5期)2016-08-22
铁道通信信号(2016年6期)2016-06-01
中国铁道科学(2015年5期)2015-06-21
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
