
反舰导弹CGF系统智能决策模型的研究*
2013-08-10 09:04方良汪浩
舰船电子工程 2013年8期
方 良 汪 浩
(中国人民解放军92941部队 葫芦岛 125000)
1 引言
CGF智能决策模型的设计是CGF建模中关键的部分,它的本质就是智能化技术在CGF建模中的具体应用[1~2]。用于解决CGF智能化的主要手段是在设计过程中采用人工智能技术。智能技术已得到各国的重视,在空战、坦克等领域已较成功地开发了一些CGF系统[3~4],国内的某坦克CGF系统利用Agent技术实现坦克分队的机动仿真[5]。
反舰导弹突防能力是现代反舰导弹作战最为重要的能力之一,反舰导弹突防能力的生成需要依赖于大量的试验工作,这些试验工作中最重要的就是飞行试验,但是这些试验的组织需要大量的兵力,耗费大量的经费。构建反舰导弹CGF系统智能决策模型,利用这些模型进行仿真试验研究,能够得到大量的统计数据,利用这些数据提升反舰导弹的突防能力。
2 反舰导弹CGF系统智能决策模型建模
反舰导弹CGF系统智能决策模型的组成如图1所示。CGF系统主要分为实体模型和推理决策模型两部分[6~7]。实体模型包括反舰导弹综控机模型、反舰导弹物理模型和反舰导弹传感器模型。推理决策模型的作用是根据目标信息与环境信息生成相应的战场态势,根据战场态势、战术知识库、和作战规则作出战术决策、动作规划并执行战术动作,各实体模型发出相应的命令和控制信号,如反舰导弹抗干扰对抗、反舰导弹机动等。
反舰导弹智能决策模型加载于反舰导弹平台系统上,通过反舰导弹的传感器模型实时获取突防目标信息,经过传输和融合等相关数据处理后,实现目标捕捉和跟踪,并把处理后的数据作为本系统必要的决策数据信息,专家系统依靠这些信息,通过搜索规则集中的规则,来完成定性的知识推理和定量的模型计算,形成一个有机的决策整体,从而为反舰导弹形成智能决策方案,进行有效的突防决策行为。

图1 反舰导弹突防CGF系统智能决策模型组成
2.1 反舰导弹CGF系统的实体模型
在反舰导弹CGF系统中,实体模型包括反舰导弹物理模型,制导控制模型和传感器模型。
反舰导弹的物理模型主要是反舰导弹的弹道物理模型。弹道物理模型采用飞行动力学建立的导弹运动方程组来描述作用在导弹上的力、力矩和导弹运动,由描述导弹质心运动和弹体姿态变化的动力学方程、运动学方程、角度几何关系方程组成。
导弹的传感器模型包括导引头模型、捷联惯导模型、高度表模型等,实时敏感导弹自身的位置、姿态及被攻击目标的运动,将敏感到的信号传输到弹上控制器模型。导弹的捷联惯导模型完成导弹飞行过程中相对惯性空间的线运动和角运动参数的实时测量,并实时进行导航方程解算,输出飞行过程中三个方向的加速度、速度、角速率、姿态角等信息。
综控机模型根据传感器输入的导弹、目标信息以及导弹的控制规律,控制导弹改变当前姿态和质心位置,飞向目标。
对于导引头模型在一定的虚警概率下,依据雷达探测方程,实施对导引头的功能仿真。
无干扰条件下,雷达导引头对目标的探测距离由雷达对目标的最大作用距离及雷达的通视距离所决定,雷达的探测距离计算式(1)如下[8]:

其中Rmax是雷达对目标的最大作用距离,Rs为通视距离。

式中,Pt为雷达发射功率(W);Gt为雷达天线增益(倍);λ为雷达工作波长(m);σ为目标雷达截面积(m2);K为波尔兹曼常量,取为1.38*10-23W·s/°;T0为绝对温度,取为290K;Δfr为雷达接收机带宽(Hz);Fn为噪声系数;(SN)min为雷达的最小检测信噪比,定义为雷达发现概率为0.5时接收端的信噪比。

式中,ht为目标高度,hr为雷达高度。
在噪声干扰条件下,单部警戒雷达对目标的最大探测距离为

式中,Pt为雷达发射功率(W);Gt为雷达天线增益(倍);λ为雷达工作波长(m);σ为目标雷达截面积(m2);Nr为雷达的内部噪声;Nj为雷达接收的干扰机噪声;(SN)min为雷达的最小检测信噪比,定义为雷达发现概率为0.5时接收端的信噪比。

式中,K 为波尔兹曼常量,取为1.38*10-23W·s/°;T0为绝对温度,取为290K;Δfr为雷达接收机带宽(赫兹);Fn为噪声系数;

式中,Pj(i)为第i部干扰机的发射功率(W);Gj(i)为第i部干扰机的天线增益(倍);γj(i)为第i部干扰机干扰信号对雷达天线的极化损失;Rj(i)为第i部干扰机到雷达的距离(m);Δfj(i)为第i部干扰机的带宽(Hz);G′t(θji)为雷达天线主瓣指向目标方向时,在第i部干扰机方向上的增益(倍)。
2.2 反舰导弹CGF智能决策模型
反舰导弹CGF智能决策模型主要包括两部分,一是反舰导弹突防防空导弹拦截的智能决策模型,二是反舰导弹突防敌方电子干扰的智能决策模型。
在反舰导弹CGF智能决策模型中,把专家系统和决策支持系统结合,形成智能决策模型,专家系统辅助决策的方式属于定性方式,决策支持系统辅助决策的方式属于定量分析。专家系统由“推理机、知识库和动态数据库”三部件组成,其中知识库中存放大量关于反舰导弹突防的专家知识;推理机完成对导弹突防知识的搜索和推理;动态数据库存放已知的事实和推理出的事实和结果[9]。
反舰导弹CGF智能决策模型在利用推理机进行推理时,既要进行大量知识的搜索,又要对知识的前提进行匹配,这些知识主要包括反舰导弹捕捉目标知识集、反舰导弹跟踪目标知识集、反舰导弹对抗有源干扰知识集、反舰导弹对抗防空导弹知识集。对于每一个知识,需要得到这些知识的调用条件,通过调用知识集中的知识得到输出结果。反舰导弹突防CGF智能决策知识集组成如图2所示。
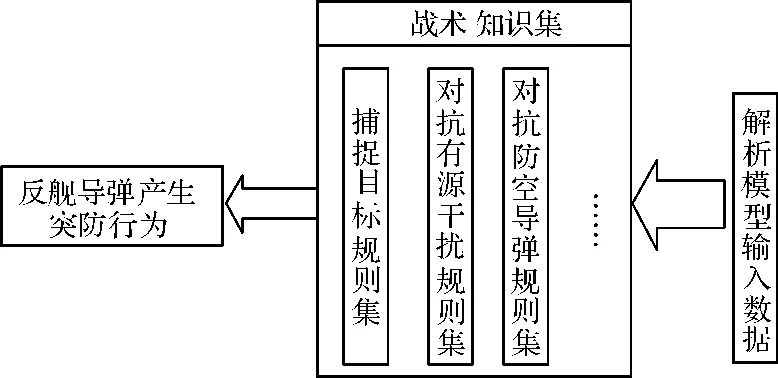
图2 反舰导弹突防CGF智能决策规则集组成
根据基于Agent[11]建模思想,可以将单个反舰导弹实体看作一个Agent,反舰导弹CGF智能决策模型的构建主要是涉及个体Agent模型,要构建反舰导弹的智能决策模型,即进行行为建模。反舰导弹利用传感器获取实体状态和战场态势,进行威胁评估,通过搜索匹配战术知识库中的专家知识,进而给出战场态势评估,从而制定战术决策,进而完成动作规划。图3给出了基于Agent的智能决策模型框架。

图3 基于Agent的智能决策模型框架
反舰导弹在飞行末端,会遭遇防空导弹的拦截,反舰导弹通过搜索规则库中相应的规则,采取相应的动作,进行相应的突防过程。
当遭遇敌方有源干扰时,反舰导弹搜索规则库中的规则,采取相应的智能决策,进行相应的突防过程。
3 结语
本文采用基于Agent的思想构建了反舰导弹突防CGF系统智能决策模型,并应用于系统仿真中。反舰导弹CGF系统智能决策模型的研究对反舰导弹作战、试验、训练效能评估有着重要的意义。
进一步的工作是对CGF技术与基于Agent建模技术做深入的研究,提高系统的自治性,增强模拟系统的真实性。
[1]张立友,唐晓明,郭齐胜.舰艇CGF系统智能推理决策研究[J].计算机仿真,2006,23(6):3740.
[2]王为颂,沈立军,张景悦.舰艇编队对空防御智能决策支持系统研究[J].舰船科学技术,2005,27(1):6163.
[3]郝成民,刘湘伟.电子战CGF系统的设计与建模[J].计算机仿真,2006,23(1):3335.
[4]韩志军,钱保成,王润岗.分队战术训练仿真系统CGF技术[J].火力与指挥控制,2005,30(8):6163.
[5]裴宏,宋丽,吴迪.基于Agent的坦克连CGF系统智能机动模型研究[J].装甲兵工程学院学报,2007,21(2):2023.
[6]王达,张琦,郭刚,等.作战仿真中的人类行为表示[J].计算机仿真,2004,21(6):1315.
[7]郭齐胜,杨立功,杨瑞平.计算机生成兵力导论[M].北京:国防工业出版社,2006.
[8]许大琴,李照顺.警戒雷达被干扰时探测范围的实时计算方法[J].火力与指挥控制,2009:128130.
[9]曲行达,龚光红,王行仁.CGF系统中多级智能决策实现方法[J].北京航空航天大学学报,2004(7):644647.
[10]濮永仙.贝叶斯决策网在智能决策系统中的应用研究[J].计算机与数字工程,2011,39(8).
[11]张玉册,杨青松,陈珂.全分布式人工智能技术在舰艇指控系统中的应用研究[J].情报指挥控制系统与仿真技术,2004,26(1):5255.
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
航天电子对抗(2019年4期)2019-12-04
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
北京航空航天大学学报(2017年9期)2017-12-18
兵器知识(2017年10期)2017-10-19
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
