遥控维护任务空间的立体视觉系统标定
2013-08-05 12:38:42邹建军王卫平孙振忠四库
东莞理工学院学报 2013年1期
邹建军 王卫平 孙振忠 四库
(东莞理工学院 机械工程学院,广东东莞 523808)
核设施当中的核心部件如靶体插件、慢化器和反射体插件等长期运行于高辐射区域,需要考虑辐照损伤对其寿命的影响,应在设计中考虑常规的维护和更换[1]。由于部件材料在高辐射区域受到辐射后会引起感生放射性 (即活化),对于那些活化或表面污染部件的维护都必须在具备防护的条件下遥控操作,避免辐射对维护人员的危害[2]。遥控维护是设备维护人员在远离维护现场的安全区域,通过操纵机械手 (人)或专门的自动化设备在核设施的内部开展设备监测和维护工作[3]。过去维护过程采用全手工遥控的方式来完成,这样导致工作低效且成本贵,使用遥操作需要的时间是直接操作的十到百倍,并且质量不高[4]。基于机器人在自动化执行方面的优势,建立自动化的遥控维护过程是提高遥控维护水平的重要途径。
任务空间就是机器人在执行该任务过程中,机器人系统可能到达或者涉及的周围空间区域的整体。遥控维护的任务空间的三维重建就是指遥控维护机器人系统检测,分析和建立执行任务所需要的环境几何模型[5]。系统标定就是获得立体视觉系统的数学模型的过程,包括摄像机的内参数,两摄像机之间的位置关系,摄像机坐标系和世界坐标系的关系等。标定的结果相当于获得图像点对应的空间直线的方程[6]。标定的精确与否,直接影响了立体视觉系统重建的精度。
传统的标定方法需要使用精密加工的标定块,通过标定块上三维坐标已知的点与其图像点的对应来计算摄像机的内外参数。该方法可以获得比较高的精度,但标定过程成本较高,费时费力,不适合在线标定和无法使用标定块的场合[7]。考虑到遥控维护环境的非结构化,非确定性和放射性,传统的标定方法不能满足遥控维护任务空间三维重建的要求。
立体视觉技术是近年来新兴的三维重建技术,由于其原理简单,发展成熟,已广泛应用于多个领域的三维重建工作[3]。针对遥控维护任务空间三维重建的特点,本文提出了面向遥控维护任务空间三维重建的立体视觉系统标定方法,采用平面模板的摄像机标定算法实现了空间位置精度标定,最终实现遥控维护任务空间三维重建工作。
1 立体视觉系统标定方法
立体视觉三维重建包括三个最基本步骤:系统标定,立体匹配和深度确定。立体视觉系统的标定首先要对摄像机的标定。立体视觉用两个摄像机来代替人的双眼,由计算机来模仿人类视觉[6]。在立体视觉中,空间某点的三维几何位与其在图像中对应点之间的映射关系是由摄像机成像的几何模型决定的。在大多数条件下,几何模型的参数必须通过实验和计算才能得到。摄像机标定就是获得几何模型参数的过程。摄像机标定包括内参数的标定和外参数的标定。内参数的标定是指确定摄像机内部几何和光学特征参数,其目的是校正摄像机的各种参数误差,如焦距、摄像机畸变等。外参数标定是指确定摄像机坐标系相对某一固定坐标系 (即世界坐标系)的位置和姿态[7]。在遥控维护的应用中,立体摄像机的标定,除了对两个摄像机的内部参数进行标定,还需要标定两个摄像机位置关系。
本文使用平面模板标定算法对摄像机进行标定,该算法使用制作简便的二维模板,标定过程中只需要摄像机从不同方向拍摄平面模板的多幅图像,摄像机与平面模板间可自由移动,运动的参数无需已知。通过求取平面模板与每个视点图像间的单应性矩阵来计算摄像机参数。
2 摄像机的标定
摄像机的标定首先是选取合适的摄像机模型,摄像机模型是光学成像几何关系的简化。一般来说,模型中参数越多,越能真实地反应摄像机的光学特性,但同时也造成需要标定的摄像机参数也越多,增加了标定过程的复杂性。本文采用了针孔摄像机模型,该模型的精度能够达到满足要求,而且标定过程相对简单,能够满足遥控维护的需求。
2.1 针孔摄像机成像模型
在计算机视觉中,利用所拍摄的图像来计算出三维空间中被测物体几何参数。图像时空间物体通过成像系统在像平面上的反映,即空间物体在像平面上的投影。图像上每一个像素点的灰度反映了空间物体表面某点的反射光的强度,而该点在图像上的位置则与空间物体表面对应点的几何位置有关。这些位置的相互关系,由摄像机成像系统的几何投影模型所决定的。三维空间中的物体到像平面的投影关系即为成像模型,理想的投影成像模型是光学中的中心投影,也成为针孔模型。针孔模型假设物体表面的反射光都经过一个针孔而投影到像平面上,即满足光的直线传播条件。针孔模型主要有光心,成像面和光轴组成。小孔成像由于透光量太小,因此需要很长的曝光时间,并且很难得到清晰的图像。实际摄像系统都是由透镜组成。两种模型具有相同的成像关系,即像是物点和光心的连线与图像平面的交点。因此,可以用针孔模型作为摄像机成像模型。
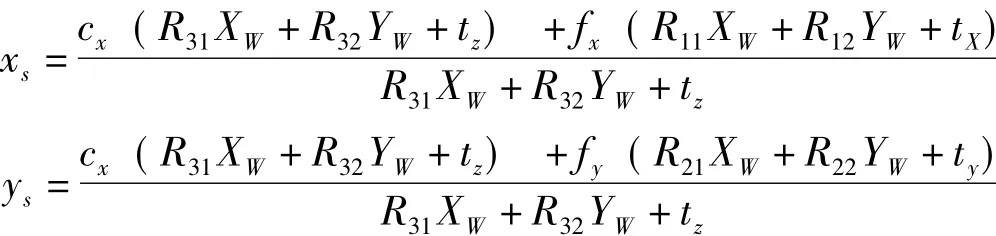
2.2 基于平面模板的摄像机标定
目前对于摄像机内参数的线性标定方法有很多种,而基于平面模板的标定方法简单易行,该方法只需要摄像机从不同方向拍摄平面模板的多幅图像,摄像机与平面模板之间可自由移动,运动的参数无需已知,通过求解平面模板与每个视点图像间的单应性矩阵来计算摄像机参数。该方法假定标定目标是平面的,而世界坐标系和摄像机坐标系在同一平面,这样的话,只要标定内部参数,从而简化标定。以下为标定的关键算法:由于世界坐标系和摄像机坐标系在同一平面,所以在标定平面点的坐标可写成(Xw,Yw,0)。由于Zw=0,可以得到:
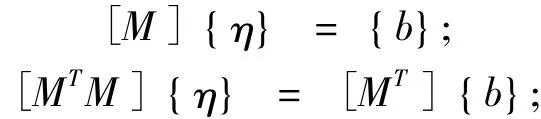
若采用线性拟合方法求解这两个等式还无法直接求出,因此,定义一个参数向量 {η}使之与标定参数之间建立起线性关系。

这样就把线性标定的过程只需两个步骤。首先对线性方程进行求解得到每一个视角方向上的参数{η}i。第二步,实际的摄像机参数如焦距和视图中心可以通过参数 {η}i求解出来。从上面的公式可以看出总共有8个η未知数,当摄像机从同一个视角方向拍摄超过四幅以上的图片后可以通过相应的矩阵变换求解出这8个未知量,矩阵变换过程如下:

2.3 摄像头相互位置标定
在对两个摄像分别进行标定以后,还需要标定两个摄像头之间的位置关系。在对两个摄像机分别进行标定以后,还需要标定出两个摄像机之间的相互位置关系。在上面的标定过程中,认为世界坐标系固定在模板上,所以摄像机拍摄的每幅图像都有外参数表示了摄像机坐标系和世界坐标系之间的联系。
xl=RlXW+T1; xr=R2XW+T2,消去XW得到:
Rrl=, Trl=T2-R2T1。对于拍摄的每一幅图像都有一组[Rrl,Trl],就可以根据上面的矩阵计算,求解去两个摄像头之间的位置关系。
3 遥控维护立体视觉标定试验
3.1 试验系统
双目标定首先要进行单目标定,得到左右相机的内参数和畸变参数。并在此基础上拍平板模型图像对,赋予每个点相同世界坐标,这样可标定得到每路相机的外参数矩阵,进行变换可得到双目参数(R,t),为了得到更高的精度,可从不同的角度拍摄。
试验中使用安装在三脚架视线交汇配置的两个CCD构成的立体视觉系统,放置在机器人任务工作空间以外,以便于观察到任务空间的全景,实物如图1所示。为了验证该方法的正确性,本文采用自制的平板模型进行标定 (如图2所示)。标定过程中,把平板模型摆放于不同位置,摄像机从不同的方向拍摄10幅图像。

图1 立体视觉系统
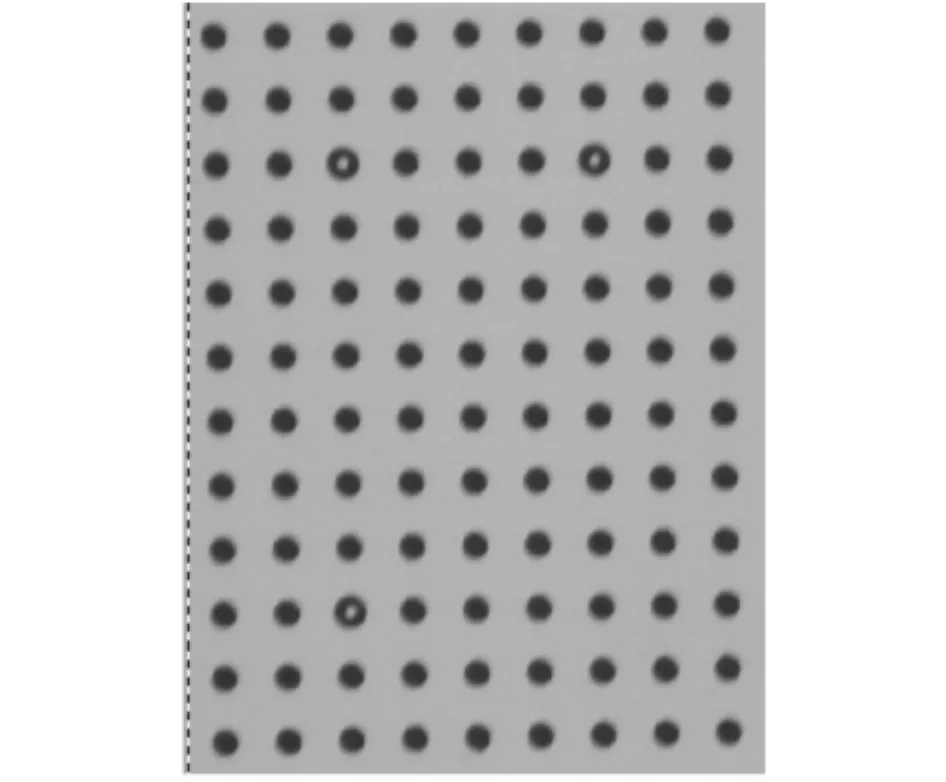
图2 试验用的平板模型
3.2 试验结果
首先对摄像机分别进行标定,两个摄像机内参数标定结果如下:两摄像机之间的旋转矩阵为:R0=

并通过计算,标定结果的平均误差为1.5 mm。
4 结语
提高遥控维护自动化水平是遥控维护改进的一项重要的内容,而遥控维护环境的三维重建是实现自动化的前提和基础。本文结合遥控维护的特点,利用立体视觉技术实现了遥控维护机器人任务空间精度标定方法。最后,通过试验验证了本文所提方法的可行性与实用性。
[1]Gottfried R,Bauer R,Lagerbauer B.ITER Port Handling System Design,Final RePort from ITER International Team,Contract No:FU05 -CT-2002 -00071,2003.
[2]Gottfried R,Bauer R.ITER Port Handling System Design,Final RePort from Intemational ITER Team,Deeember 2003,Contraet,2000.
[3]陈卫东,蔡鹤皋,赵杰,等.主从式遥控机器人力觉临场感技术的研究[J].高技术通讯,1996,6(12):19-22.
[4]梁志敏,高洪明,张广军,等.遥控焊接中立体视觉系统标定[J].焊接学报,2006,27(9):103-107.
[5]丘茂林,马颂德,李毅.计算机视觉中的摄像机定标综述[J].自动化学报,2000,26(1):43-55.
[6]Geeter De J,Decreton M,Colon E.The Challenges of Telerobotics in a Nuclear Environment[J].Robotics and Autonomous Systems,1999,28(1):5-17.
[7]高洪明,梁志敏,董娜,等.基于立体视觉的遥控焊接机器人任务空间三维建模[J].焊接学报.2007,28(11):5-8.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
汽车维修与保养(2020年11期)2020-06-09 05:42:16
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
中国公共安全(2017年8期)2017-10-13 08:12:17
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
光学精密工程(2016年3期)2016-11-07 09:03:34
新闻前哨(2015年2期)2015-03-11 19:29:25
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38