基于双CCD摄像技术的车辆安全预警系统研究
2013-08-01 02:10余国亮连晋毅王飞龙
太原科技大学学报 2013年2期
余国亮,连晋毅,王飞龙
(太原科技大学机械工程学院,太原030024)
自从汽车成为寻常百姓的代步工具之后,交通事故的频繁发生已经演变成为一场“交通战争”。以2011年[1]为例,全国共发生交通事故210812起,共造成62387人死亡,直接财产损失数亿元,其数目之惊心,令人有种“谈车色变”之感。而交通事故高发的重要原因之一就是汽车在高速道路上行驶时,驾驶员预测危险的潜意识以及应急反应能力比较差,反应速度相对滞后,因而对车辆主动安全预警防碰撞[2-4]系统的研发与应用势在必行。
与此同时,随着近年来电子技术和计算机科学的飞速发展,机器视觉——CCD摄像机在车辆智能防碰撞系统研究中不断崭露头角。它以采集图像速度快,反应灵敏,体积小巧轻便,性价比高等诸多优势越来越受到研究人员的重视。
1 车辆安全预警系统概述
车辆安全预警系统包括图像采集预处理模块、障碍物识别模块、路况信息显示模块、声光报警模块和紧急刹车模块[5]等(如图1)。
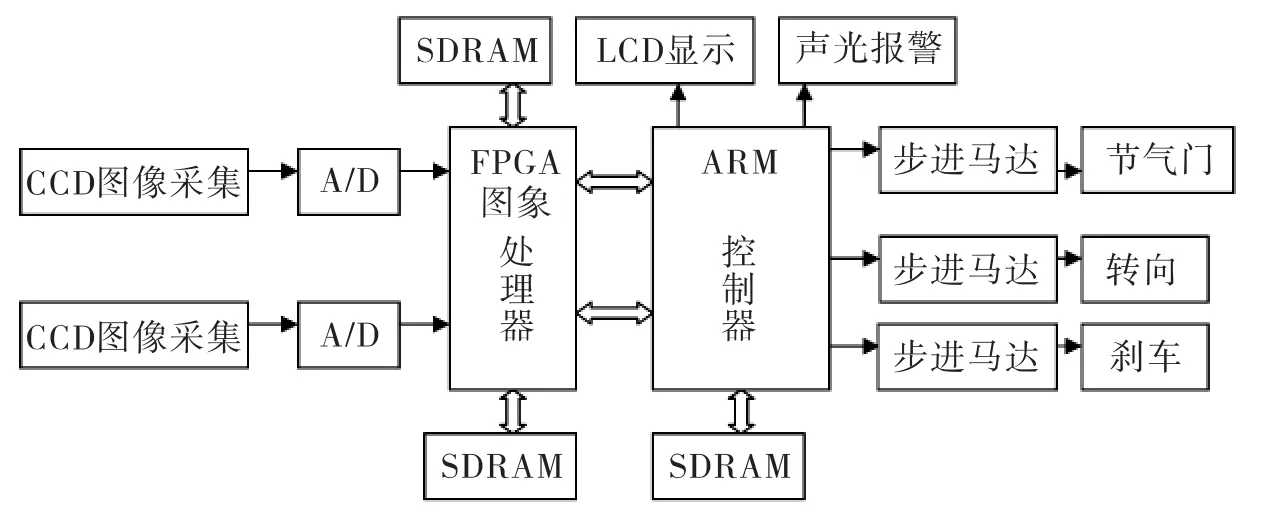
图1 车辆安全预警系统实现总框图Fig.1 The block diagram of vehicle safety warning system
图像采集处理模块是由CCD立体摄像机进行实时监测、采集车辆行驶前方的路况信息,并通过计算机图像处理技术,改善图像质量,提高人们的视觉效果。障碍物识别模块也是属于数字图像处理技术的范畴,进行图像分类识别,并通过相应的算法进行比较判断,最终识别出是车辆或行人等障碍物。路况信息显示模块是将拍摄到的实时路况信息,经图像处理技术处理后,将清晰的图像反映到液晶显示屏幕上,既扩展了驾驶员的视野,又能动态及时的检测路况信息,保障行驶安全。声光报警和紧急刹车模块是当系统判断出有障碍物出现、且其跟车行驶间距小于安全行车间距时,通过声光形式对驾驶员进行报警或采取的相应措施(如触发车辆自动进行紧急刹车来避免事故的发生等)。
2 CCD立体摄像技术
2.1 CCD 摄像头
CCD是Charge Coupled Device(电荷耦合器件)的缩写,是一种金属氧化物半导体(MOS)集成电路器件。它由许多以百万像素为单位的感光单元组成,能把光线转变成电荷,再通过模数转换器芯片转换成数字信号。由于其具有灵敏度高、抗强光、畸变小、体积小、寿命长和抗震动等优点而得到广泛应用。本系统采用的是日立制造所研制的单色CCD立体摄像头,像素约为30万,图像拍摄帧速30帧/s,识别范围为0~100 m和0~100 km/h的安全时速。
当景物光照射到CCD表面时,景物的图像经过镜头聚焦至其芯片上,并迅速将其按照光信号强弱的不同转换为高低不同的电信号,矩阵高速开关电路逐行逐点地将每点的电信号按顺序输出(将信号读出),便可完整地将整幅景物电信号扫描出来。
2.2 双CCD立体摄像测距原理
利用双CCD立体摄像技术进行障碍物测距,是模仿人类用双眼来观察客观世界而产生距离远近的原理。它基本上类似于用双CCD摄像头同时拍摄两幅图像组合而成。由于物距远大于透镜焦距,因此,此模型可以用小孔成像原理代替透镜成像。故而,基于双CCD立体摄像头测距可以简化为如图2所示的平面模型。
虽然CCD摄像头拍摄的是空间立体三维图像,但是,可以把两个CCD和障碍物简化为三个点,三点确定一个平面,故而是一个二维平面图形。其中,物距为L,焦距为f,两CCD之间距离为b,以及成像点偏移 CCD 中心的距离X1,X2和夹角 θ1,θ2分别如图2所示。
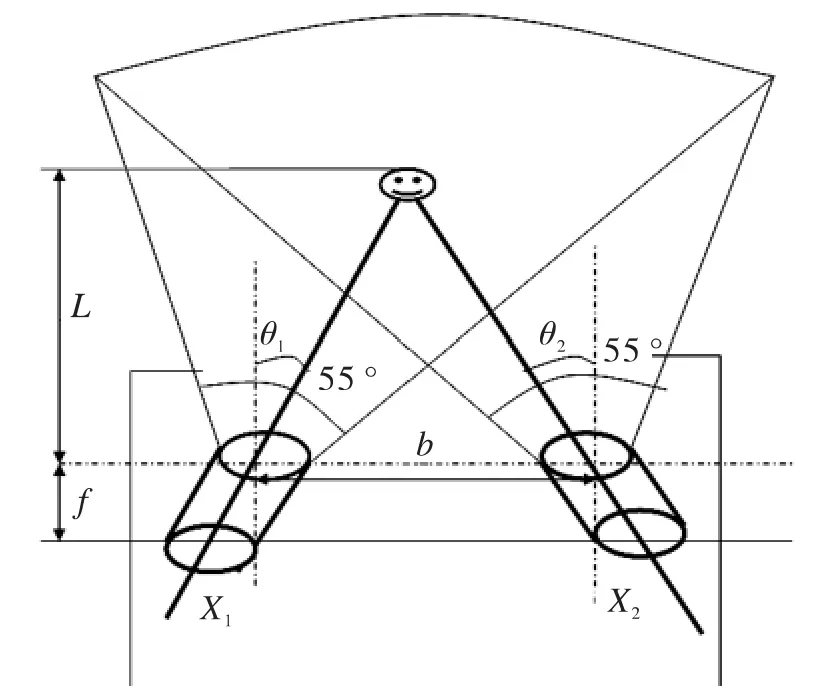
图2 CCD摄像头测距模型图Fig.2 CCD camera location model
根据三角形相似原理[6]可得:


根据几何关系:X1=ftanθ1,X2=ftanθ2,带入式(2)式可得:

在实际的应用中,有下述两点事项必须在系统设计中予以考虑:
(1)降低虚警率设计:该安全系统设计的初衷是检测车辆正前方的车辆和行人障碍物,当遇到危险发出警报来提醒驾驶员。而由于摄像头视角的问题,摄像头拍摄车辆前障碍物时,可能会拍摄到其它车道上的车辆图像及其路边围栏和树木图像,本不该报警的却出现报警的现象为虚警。如此不仅降低系统的鲁棒性,而且频繁报警还会干扰正常驾驶。由于摄像头检测到障碍物时,是由两个摄像头同时捕捉到的,每个摄像头的照射视角范围一般在55°左右,所以在安装摄像头时,只要能够保证正常检测障碍物的距离与速度前提下,应尽可能多的把摄像头的视角范围控制在的车辆正前方,这样可以减少对车辆两侧虚警的捕捉,降低虚警率(如图2中摄像头视角向车辆内侧偏移)。
(2)摄像头测距精度预估:双CCD立体摄像头采用左右两侧拍摄图像的视差来测距,装配在汽车
故而可得:上应考虑如何保证其精度。由式(2)可知,用X=X1+X2进行代换,测距表达式即为公式(4)[7]。

由此可推出相对误差公式为:

由式(5)可知:中心距b,焦距f越大,相对误差越小,精度越高;物距L越大,△X越大,相对误差越大,精度差。
因此,在车辆设计CCD的安装位置和CCD的制作过程中,要对其位置水平度严格控制。
3 图像处理与识别模型
3.1 图像处理基础
数字图像处理(Digital Image Processing)又称为计算机图像处理。它是将图像信息转换为数字信号并利用计算机对其进行处理的过程,以改善图像质量、提高人们视觉效果为目的。
图像识别是利用计算机对图像进行处理、分析、理解的过程,以识别各种不同模式的目标和对象。为了识别某个图像,必须让计算机像人的大脑一样有对该图像有记忆功能。该系统的图像处理与识别的流程图设计如图3所示:
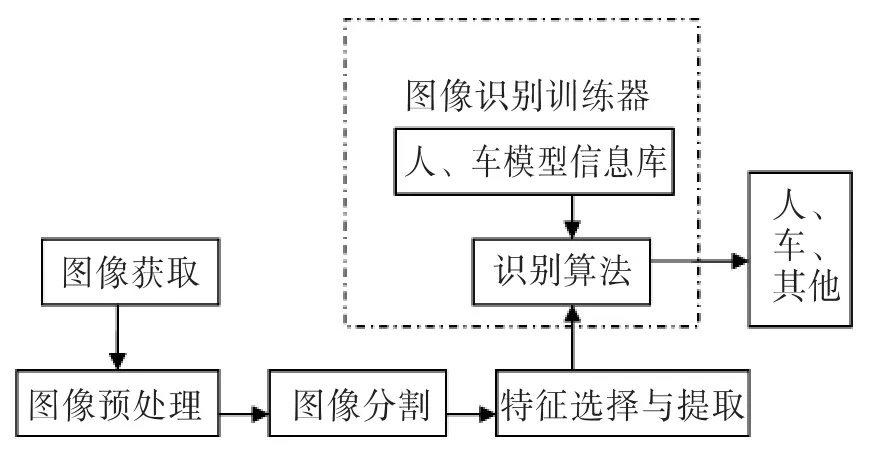
图3 图像处理识别设计流程Fig.3 The design process of image processing and recognition
图像的预处理功能包括:图像的变换(如滤波处理),编码压缩,增强和复原(如去噪),从而使图像的清晰度和传输速度都得以提高。图像分割是将图像中有意义的特征部分提取出来,其有意义的特征包括图像中的边缘,区域,轮廓等。这是进一步进行图像识别、分析和理解的基础。
特征的选择与提取是对物体进行量化的过程。为图像的识别做好准备。
3.2 图像识别与算法过程
CCD立体摄像头主要检测的运动目标是车辆和行人,但是在拍摄图像里面也会含有路旁晃动的树木,围栏和高架桥等。因此需要剔除这些虚假信息,同时,对于车辆和行人也要进一步确认,即根据各种图像信息特征的不同(比如运动目标的面积大小不同、运动速度高低不一、外形轮廓相差很大等)进行分析判断。在此,我们设计了一种基于行人和车辆运动特征的检测算法,其前提条件[8]主要包括:
行人的速度比车辆的慢得多,轮廓面积又比车辆小很多,况且两者在图像中的面积大小和长宽比都有阈值范围,是可以区别的。行人和车辆与路旁的其他障碍物相比,在特征轮廓面积和运动的速度方面有较大区别。
基于以上前提条件来确定算法:首先,车辆和行人速度上的巨大差距,可以设定速度阈值来将其分开。其次,车辆和行人的外部轮廓特征的长宽比的差距之大,也可以很好的将二者区别开来。在人的识别方面要强调的是人在正面拍摄时,其脸部特征是可以直接捕捉的(用Roberts算子检测),从而可以直接进行识别。在侧面或者背面时,其头部,身躯的长宽比可以用设定阈值方法来判定。图像匹配识别流程如图4所示。
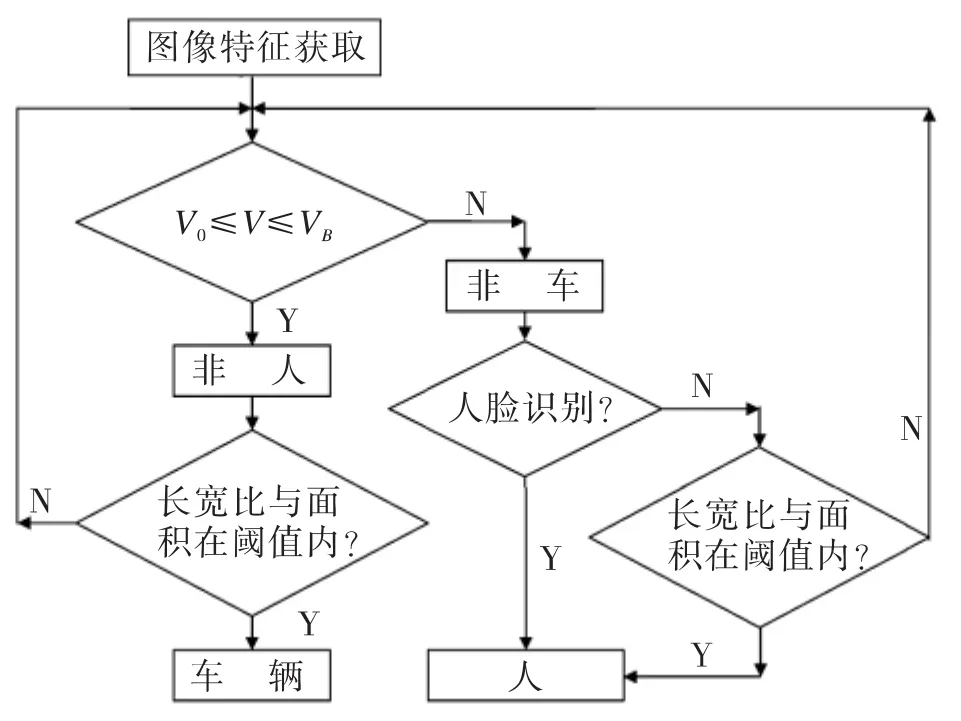
图4 图像识别快速训练分类器Fig.4 The training classifier of fast image recognition
4 车辆跟驰模型及系统模拟仿真实现流程
4.1 车辆跟驰模型建立
车辆安全行驶车间距(简称“安全车距”)是车辆正常行驶条件下,两车按照目前的行驶状况(包括相对速度、加速度等)不会发生碰撞危险,车辆应保持的行驶距离;最小安全车距是两车在目前的行驶条件下,后车立即刹车到完全停下不至于发生碰撞事故,两车间行驶应保持的最小车间距离。
影响安全车距的关键因素有车速,驾驶员反应时间和两车的制动性能等。前导车A和后随车B之间的跟驰模型,根据物理运动学关系车辆跟驰模型为[9]:
式中:t1——驾驶员反应时间(s);
t2——制动器协调时间(s);
t3——制动器减速增长时间(s);
aAmax——A车最大减速度(m/s2);
aBmax——B 车最大减速度(m/s2)。
要保证A、B车的行驶安全,两车从开始制动到完全停止,前车车尾到后车车头应保持一定安全距S,故A、B车在行驶制动时应保持的安全距离为:
式中:Sa——安全停车距离。
在整个控制系统中,除了反应时间和制动时间由经验值和实验值测量出之外,两车的速度、加速度应采取如下方式获取:
由于两车的相对车距是利用双CCD立体摄像头测量,摄像头拍摄每幅图像时间T,可以根据帧速(30帧/s)来求得,根据运动学原理可知:
(1)相对速度△V=(L1-L2)/T,又因为VB-△V=VA,因此有:
VB可以由本车自带的速度传感器直接提供数据,则前导车瞬时车速即可求得。
(2)相对加速度
△a=(△V1-△V2)/T又aB-△a=aA
后随车加速度aB可以由本车车速传感器直接提供数据,故前导车瞬时最大加速度即可求得。
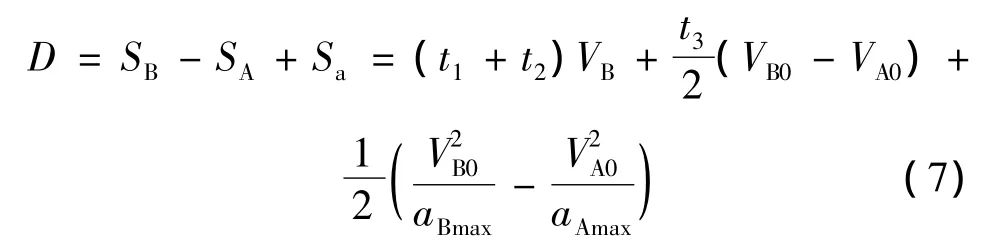
图5 行人面部捕捉Fig.5 The capture of pedestrian facial

图6 行人身体捕捉Fig.6 The capture of pedestrian body
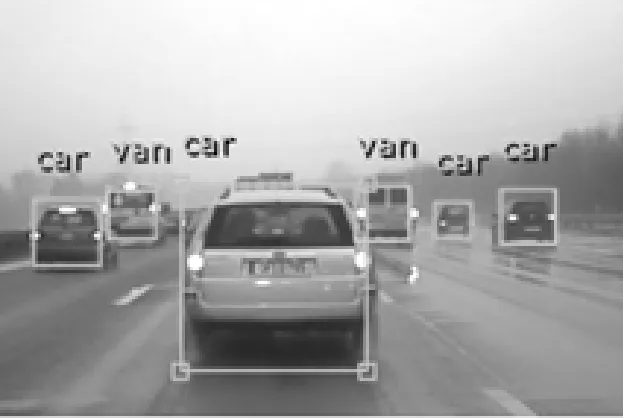
图7 车辆尾部捕捉Fig.7 The capture of vehicle rear
4.2 计算机模拟仿真
以下仿真(图5-图7)是在道路以及高速公路上采集到的行人和汽车行驶的图片,通过采用MATLAB对图片中障碍物进行图像处理、图像识别,捕捉关键特征,并进行模拟仿真实验。
(1)人脸识别[10]:首先对运动行驶障碍物进行人脸肤色分割,聚焦有人脸特征部分,进一步对人脸部分进行长宽比测量,来区分类似人脸特征的运动障碍物。由于行人面部有对着正面,侧面之分,头上可能带有帽子,头盔的情况,因此要放宽人脸长宽比范围。根据大量的测量计算可知:人脸长宽比范围为0.8~1.7时,可有效地识别出行人。
(2)人体身体的识别[11]:判定行人,不仅可以通过人脸面部特征,而且还可以通过行人的身体特征来共同识别。其中人体身高与身体的宽度之比也是识别行人的一种方法。人体正面站立时,其身高和肩宽之比为一特征值;当人体侧身时,身高与胸部宽度之比作为特征值。由于行人分大人、小孩、男女身体条件的差异,可对人体身高有和体宽之比放宽为3.5~10,同时也可以排除不在范围比内、类似于行人的障碍物。
(3)车辆识别[12-13]:汽车的识别,可以直接通过其尾部特征进行判断。车辆尾部的车宽与车高比都有一定的标准,根据不同车型标准和大、中型有所不同。根据实际测量和一些设计标准可知:轿车类型的汽车尾部车宽与车高比为0.95~1.30;厢式货车、商务车和公交车等的车尾车宽与车高比为0.75~0.95;如此而来,不仅可以识别出是车辆,而且还可以知道是什么类型的车。进一步提高了判断的准确性和鲁棒性。
通过采用以上判定标准和判定识别规则,利用计算机很好的模拟了该安全预警系统对人、车等障碍物识别。其准确性和效果基本上达到了预期的目的和要求。
4.3 系统的工作流程
该系统采用ARM控制处理器,其软件的实现可以应用C语言或者C++的简单编程即可完成,软件实现流程如图8所示。而控制程序在编程过程过中,车辆是预警还是刹车,完全是靠摄像头检测的障碍物与本车之间的距离。根据一些汽车企业(奔驰,富士重工,日产)设计该预警或者刹车距离的方法,是把距离转化为车辆运行倒计时时间,也就是车辆碰撞前多长时间开始预警,碰撞前多长时间开始刹车,不同的公司的主动安全汽车有不同的安全系数如下表1.
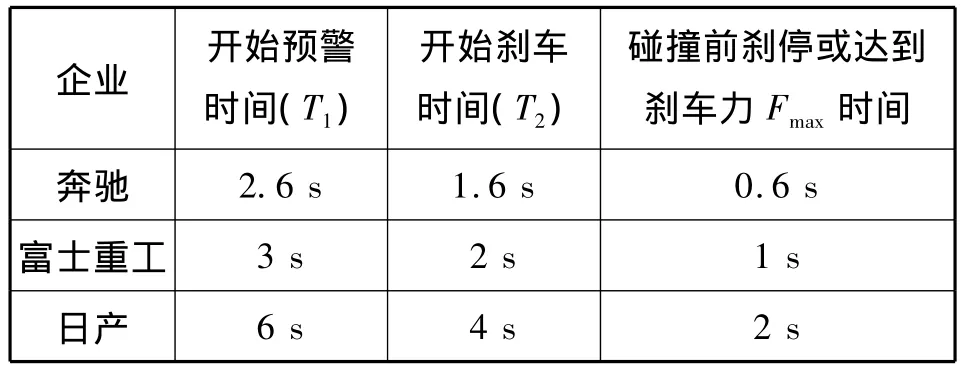
表1 不同汽车公司安全预警刹车时间对比Tab.1 The contrast of safety warning brake time of different car companies
由表1可知,在系统编程时候,可以分别选择时刻T1,T2为参照,进行编程,该控制程序很容易就可以完成。
5 结论
该车辆安全预警系统采用机器视觉实现了障碍物的识别、判断、预警等一系列功能,系统可靠,结构简单。与采用激光雷达、毫米波雷达等传感器相比价位降低了三成左右,与采用超声波、红外线等传感器在检测距离、速度、实时性、鲁棒性等方面达到了更好的效果。
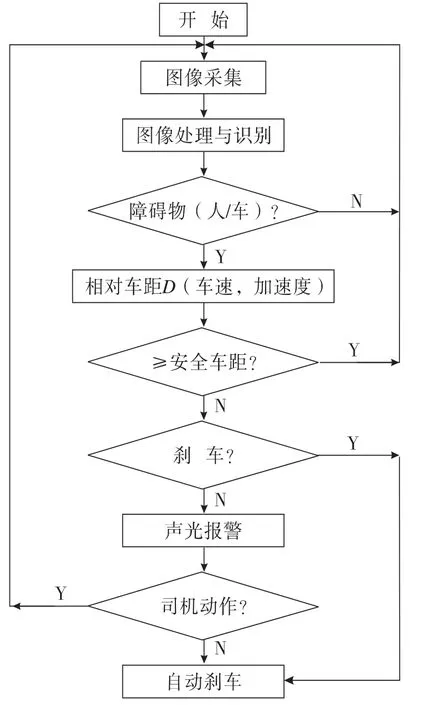
图8 车辆安全系统总控制流程图Fig.8 The general control flow chart of vehicle safety warning system
该系统拥有明显性价比优势的同时,也有其不足之处。首先是CCD摄像头角度的正确调整,虽然可以明显降低虚警率,但是车辆前方摄像头仍有一部分死区无法及时检测到位。其次是该系统在夜间能见度低的情况下,不能够更好识别图像信息,所以建议加装一个红外夜视仪,使白天黑夜都不受影响。最后,该系统的初衷是识别运动的车辆和行人,由于实时交通环境的复杂,特殊条件下许多情形不能够完全考虑,比如一些静止的障碍物、虚警不能够很好的识别或排除。并且,在利用MATLAB进行模拟仿真时,对图像中障碍物轮廓特征捕捉不稳定,定位不够准确,图像处理存在一定的噪声,这也是在以后的工作中应该重点研究改进的地方。
机器视觉是未来智能车辆,无人驾驶的最佳研究方向,具有良好的发展前景。特别是随着计算机技术,电子信息技术的飞速发展,系统的处理速度与传输速率得到极大的提高,其反应能力,决策性能都是人类所无法比拟的。
[1]古月.2011年全国交通事故造成62387人死亡 同比下降4.4%[EB/OL].(2012-02-09)[2012-10-20].http://news.china.com.cn/txt/2012-02/09/content_24597930.htm.
[2]HIDEO ARAKI,KENICHI YAMADA,YASUHISA HIROSHIMA,TOSHIO ITO.Development of rear-end collision avoidance system[C]//JSAE,1997(18):314-316.
[3]WAKASUGI T,YAMADA K.Driver reaction time to forward vehicle collision warning[M].Proc.of ITS World Congress,2000.
[4]连晋毅,华小洋.汽车防追尾碰撞数学模型研究[J].中国公路学报,2005,18(3):123-126.
[5]万沛霖,陈渝光,李山,等.车辆智能型主动安全系统[J].研究与方法,2005,54(10):25-26.
[6]EL-HAKIM S F,PIZZI N J,WESTMORE D B.The VCM automated 3-D measurement system[C]//Proc SPIE,1992:460-482.
[7]李雪娟,蔡怀宇,黄战华.基于双目视差的测距系统设计[J].电子测量技术,2007,30(8):201-202.
[8]曹江中,戴青云,谭志标,等.交通信息采集系统中的行人检测算法[J].现代计算机:专业版,2007,7(1):13-14.
[9]侯志祥,吴义虎,刘振闻,等.高速公路汽车追尾模型[J].交通运输工程学报,2004,4(4):38-39.
[10]杨灯峰,赵勋杰.高架道路监控视频中的行人检测[J].科技创新导报,2008,36:74-75.
[11]HUS R L,MOTTALED M A,JAIN A K.Face detection in color image[J].IEEE Transactions on Pattern Analysis and Machine intelligence,2002,24(5):696-706.
[12]李瑞,方涛.基于视频的高速公路车辆提取与跟踪算法研究[J].微型电脑应用,2008,24(2):40-43.
[13]SURENDRA G,OSAMA M,ROBERT F,et al.Detection and classification systems,2002,3(1):37-47.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
意林(2021年5期)2021-04-18
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
汽车维修与保养(2015年8期)2015-04-17