
基于符号动力学信息熵与改进神经网络的风机故障诊断研究
2013-07-26 11:05王松岭许小刚刘锦廉
华北电力大学学报(自然科学版) 2013年4期
王松岭,许小刚,刘锦廉,戴 谦
(1.华北电力大学 能源动力与机械工程学院,河北 保定071003;2.中国专利信息中心,北京100088)
0 引 言
风机的运行状况直接关系到电厂的安全、经济运行,且风机的可靠性、安全性和经济性取决于其高效运行、实时状态跟踪评价、准确的故障诊断和维修,因此对风机开展故障诊断研究有重大意义。风机常见的机械故障有转子不平衡、转子不对中、轴承松动和动静碰摩等,其故障诊断方法有很多,但基本都分为三个步骤:诊断信息的获取;故障特征提取;状态识别和故障诊断。
风机在旋转过程中所产生的振动信号与故障的类型、程度、部位等有着密切的联系,包含了丰富的设备状态信息。在诊断信息的获取方面,采集振动信号进行故障监测诊断是目前应用最广泛的方法。
当故障发生时,信号的不规则性和复杂性可以反映故障的发生和发展。度量信号复杂性的方法有Lempel-Zi 复杂度、近似熵[1]、样本熵[2]和符号动力学信息熵等。符号动力学信息熵在不同的短序列长度下的结果稳定一致,计算相对简单快速,对数据量要求小,更重要的是还可捕获时间序列的非平稳特性[3]。在符号动力学信息熵方法中,首先将时间序列,例如风机振动信号,在幅值域上进行符号化编码,从而得到由有限个符号构成的符号序列,然后考察每种可能的符号串组合在符号序列中出现的概率,并对其求信息熵,通过对熵值的观察来分析原始信号内在的动力学特性,进而实现风机不同故障类型的识别。幅值域的符号化一方面极大地提高了计算速度,另一方面,如果符号化参数选择得当,尽管会丢失一些细节信息,但却能在保存动力系统的本质特性的同时,大大降低噪声的影响,因此选择恰当的符号化参数成为符号化熵分析方法中的关键[4,5]。所以本文采用符号动力学信息熵分析方法,并针对风机振动信号符号化参数的选择问题做了相应的研究。
国内外学者对于故障诊断的理论、方法和技术进行了深入的研究,发展了基于模型、模式识别、灰色理论、模糊、专家系统和神经网络等多种诊断理论和方法。神经网络具有输入输出非线性映射和并行处理等特点,特别是其高度的自组织和自学习能力,使其成为故障诊断的一种有效方法和手段[6~8]。BP 神经网络是各个领域中应用最广泛的一类网络,但也有不足之处,例如,在网络训练中要求有足够的样本量,网络易形成局部极小而得不到全局最优,训练次数多使得学习效率低,收敛速度慢等。因此,本文就BP 网络的上述不足,采用动量法和学习速率自适应的改进算法,并证明了其有效性。
本文采用符号动力学信息熵方法对风机实验台采集的振动信号进行分析,然后采用改进的BP神经网络进行故障诊断,在风机机械故障的类别、严重程度和发生部位的诊断上取得了很好的效果。
1 符号动力学信息熵
符号动力学信息熵最早由Kurths 等[9,10]提出,其计算方法如下:对于数据长度为N 的时间序列{xi}(1 ≤i ≤N),将其转换成符号序列{si}(1≤i ≤N),其中si∈{0,1,2,3},具体转换方法为[4]

式中:μ 代表时间序列{xi}的均值;α 是一个特殊参数,定义为权重,α >0。
对于符号序列{si},其中所有长度为m 的子串的集合可以表示为{Wj}(1≤j≤N-m+1),Wj=(sj,sj+1,…,sj+m-1),考察{Wj}的分布特性,即对出自符号表{0,1,2,3}的长度为m 的所有可能的4m个符号串,统计其在{Wj}中出现的次数C(l)(1≤l≤4m),并计算出第l 个符号串的概率:

对其计算信息熵:

从而得到时间序列{xi}的符号动力学信息熵。Hk反映了时间序列在符号化以后各种长度为m 的子串的模式丰富程度和分布特性,出现的符号串模式越多,分布越分散,则熵值越高;符号串模式越少,分布越集中,则熵值越低。
2 BP 神经网络及其优化
BP 神经网络是一种误差反传递算法训练的多层前馈神经网络,由1 个输入层、1 个或多个隐含层和1 个输出层构成,各层神经元之间由连接权重连接。由于标准的BP 算法存在学习收敛速度慢,不能保证收敛到全局最小点等不足,所以本文通过结合增加动量项和自适应调节学习率两种方法来对BP 算法进行改进[11]。
(1)增加动量项。BP 网络训练过程实质上就是对网络层层之间的权值进行反复修正,直至网络能够有效地描述学习样本中所蕴含的非线性映射关系。附加动量项法使网络在修正其权值时,不仅考虑n 时刻梯度降方向的调整,同时还考虑n时刻以前梯度方向的调整,从而可以减少振荡趋势,降低了网络对于误差曲面局部细节的敏感性,有效地抑制网络陷入局部极小。
因此,前一次权值调整量被取出一部分叠加到本次权值调整量中,ε 为动量系数,0 <ε <1。若W 为某层权矩阵,X 为某层输入向量,则含有动量项的权值调整量为

式中:δ 为该层神经单元的误差信号。
(2)自适应学习率η。学习率控制着权值空间中权值对应每步沿梯度方向变化的大小,学习率较大,权值调整量就较大,学习速度较快,有时可能发生振荡;而当学习率较小时,学习速度较慢,一般比较平稳。因此,在网络的训练过程中学习率应该自适应地调整。设定初始学习率η(n),若n 时刻权值调整后网络总误差(ERMS)增加,则本次调整无效,η(n +1)= βη(n),β <1 ;反之,若n时刻权值调整后网络总误差减小,则η(n + 1)=υη(n),υ >1 ;总误差不变时,学习率η 也不变。自适应调整学习速率有利于提高训练速度,缩短学习时间。
所以,结合上述两种方法可以得到n +1 时刻网络权值调整量为
3 风机机械故障诊断
3.1 风机机械故障试验模拟
本文在华北电力大学通风机实验室内的4-73No.8D 风机实验台上进行不同故障机械振动试验,是对现场条件下的运行风机的最佳模拟。该型号风机是国内电站广泛应用的4-73 系列风机之一,而同系列风机在运行过程中通常很容易满足相似定律,因此该风机实验台模拟故障的机械特性有一定的代表性,具有重要的指导意义。试验选择德国申克IN-81 一体化电涡流位移探头,在风机轴承两侧布置5 个电涡流传感器分别对垂直(V)、水平(H)、轴向(A)振动位移信号进行非接触式测量,如图1 所示。采用非接触式测量,将电涡流传感器通过螺纹连接,固定在专门加工的刚度较大的振动传感器固定架上,传感器固定架通过螺栓与基础导轨连接。振动信号的滤波采用PCB 的Model 481A 信号适调器进行可调低通滤波。

图1 机械振动测点分布( H-水平V-垂直A-轴向)Fig.1 Mechanical vibration measuring point distribution( H-level V-vertical A-axial)
本文对如表1 所示的13 类不同的风机运行状态进行了试验模拟,采用通风机故障试验测试系统对风机不同运行状况的振动信号进行采集,从而形成了4-73No.8D 风机不同运行状态的振动信号样本集,其中每种状态下每个测点测取20 个振动信号样本,共13 ×5 ×20 个振动信号样本,采样频率为1 600 Hz。由于实际风机的运行工况比较复杂,经常运行在非额定工况,因此试验风机的电机采用变频器控制,使得试验风机转速为非额定转速,更接近实际风机运行状况,变频后风机转速为1 200 rpm。
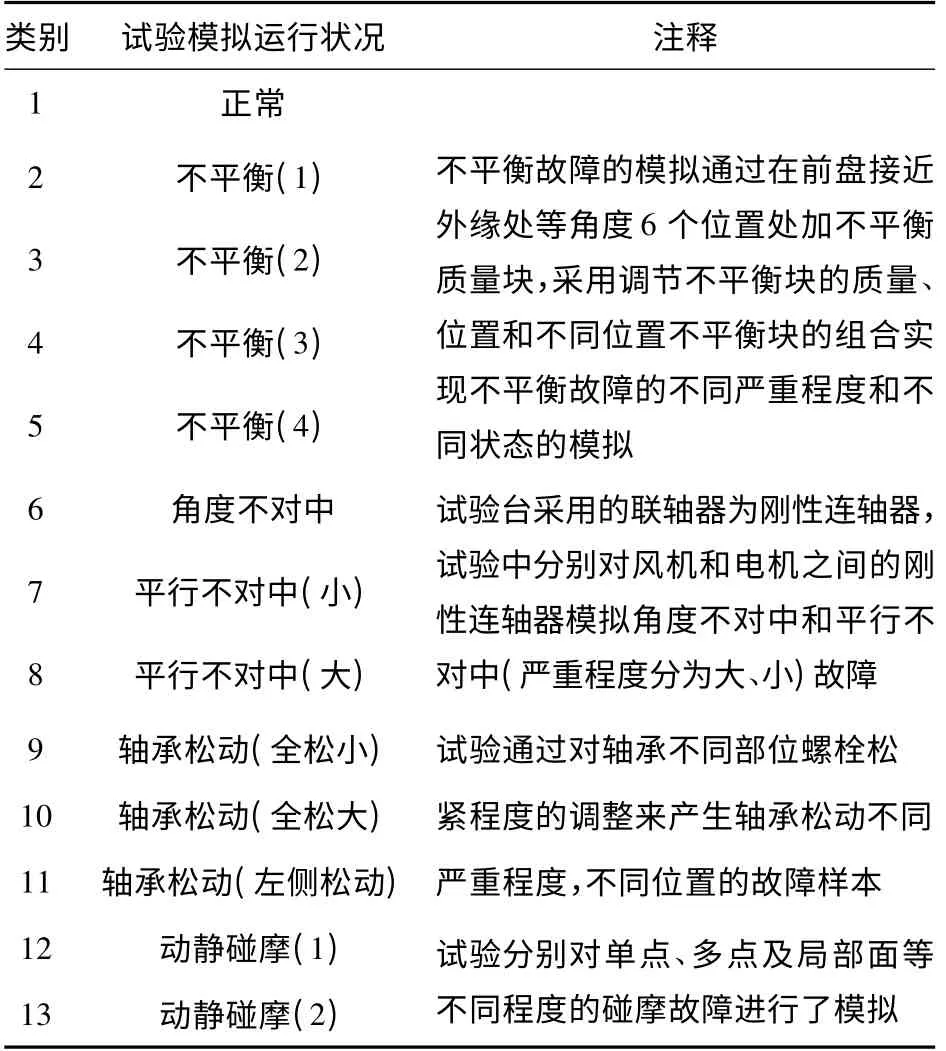
表1 试验模拟的风机运行状况Tab.1 Simulation of the fan running state
3.2 风机振动信号符号动力学信息熵特征提取
3.2.1 风机振动信号符号化参数的选择
在求取时间序列符号动力学信息熵的过程中,从式(1)可知,序列的平均值μ 和权重α 直接决定符号序列的构成,而子串长度m 的增加会导致计算量及必要数据长度的指数增加,而对于结果却无本质影响,一般取到3 就足够[4]。所以本文取m=3。为使得Hk具有统计学意义,一般要求时间序列长度N >>4m[9],本文所采集的振动信号满足这方面要求。至于文献[5]所提到的隐藏参数标准偏差对符号序列熵的计算影响很大,由于本文主要将研究重点放在风机振动信号上,通过计算,发现归一化后的振动信号标准偏差变化余地不是很大,这里就不做重点考虑。综上所述,权重α 为本文符号化是否得当的关键参数,直接决定了时间序列的动力学复杂度。由Hk的提取公式可知,随着权重α 的逐渐增大,时间序列的Hk值先增大后减小,最后趋于不变。本文风机振动信号的Hk值也遵循这种规律,但风机不同运行状态下振动信号的Hk值随权重α 的变化并不同步。
另外,风机工作转速、运行状态和测点的不同都会影响振动信号的Hk- α 曲线,在实际运行和本风机试验中,风机的工作转速和振动信号测点都是可知的,本试验风机转速为1 200 rpm,当α =0.05 时,表1 中13 类风机运行状态下第4 个测点测得振动信号的Hk值如图2 所示。图中每类风机运行状态都取了10 个振动信号样本,由图2 可知,当风机工作转速和振动信号测点确定,权重α为某一定值时,风机相同工作转速下相同测点所测得振动信号的Hk值波动不大。基于相同的前提条件,统计风机其他测点所测得振动信号的Hk值,得出结论:当风机的工作转速、振动信号测点和权重α 确定时,振动信号的Hk值因风机运行状态的不同而存在差异,但同一测点同类型风机运行状态的所有振动信号的Hk值波动不大,具有一定的可区分性和规律性。

图2 当α = 0.05 时各风机运行状态下第4 个测点振动信号的Hk值Fig.2 The Hk of different vibration signals of the fourth measuring point of each fan running state when α = 0.05
因此,可以通过分析各风机运行状态下不同测点振动信号的Hk值随权重α 变化的曲线特性,以解决本文符号化权重α 的取值问题。图3 ~7分别为实验风机第1 至第5 个测点所测的振动信号的Hk- α 曲线,图中类别对应表1 中的13 类风机运行状态。如图3 所示,随着α 从0.08 逐渐增大,第1 个测点13 类振动信号的Hk值逐渐趋于不变,甚至出现不同类别振动信号的Hk- α 曲线重叠的现象,说明当α 取值大于0.08 时,当前测点的13 类振动信号的Hk值的差异逐渐减小,甚至存在Hk值相等。如图4 ~7 所示,第2 至第5 个测点13 类振动信号的Hk值在α 分别大于0.07,0.05,0.06,0.08 时,呈现类似于第一个测点Hk- α 曲线的特性。综上所述,当0 <α <= 0.05 时,本文5 个测点测得的13 类振动信号的Hk值存在较为明显的差异性。本文的研究难点和重点在于如何才能准确地诊断风机机械故障的类别、严重程度和发生部位,所以权重α 的取值应使得当前测点的13 类振动信号的Hk值差异性越明显越好,因此本文符号化权重α 的取值范围为0 <α <= 0.05,经过反复验证,α 在此范围内时,风机机械故障诊断效果较好且相近,因此本文取α = 0.05。
当α 取值为0.05 时,试验风机各测点13 类振动信号的Hk值如表2 所示。由图2 和表2 分析可见,单一测点同一故障类型的不同发生位置、不同严重程度对应振动信号的Hk值可能呈现较为相近的现象,如表2 第2 个测点所测得振动信号的Hk值中,类别3,4,5 的Hk值较为相近,因为这3 类信号表征的都是风机不平衡故障,只是不平衡块的质量、位置和不同位置不平衡块的组合形式不同。另外,单一测点不同故障类型振动信号的Hk值也可能存在较为相近的现象,如表2 第4 个测点所测得振动信号的Hk值中,类别9,13 的Hk值极为相近。

图3 各风机运行状态下第1 个测点振动信号的Hk值随α 的变化曲线Fig.3 Fig.3 The Hk - αcurve of different vibration signals of the first measuring point of each fan running state
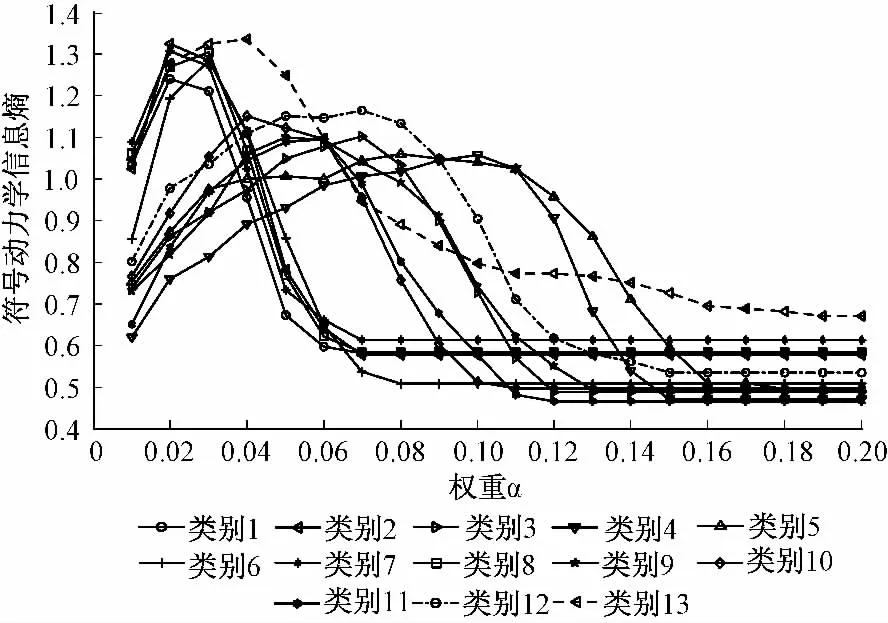
图4 各风机运行状态下第2 个测点振动信号的Hk值随α 的变化曲线Fig.4 Fig.4 The Hk - αcurve of different vibration signals of the second measuring point of each fan running state
因此,下文以单测点振动信号的Hk值为特征的风机故障诊断准确率都很低,分别为43.08 %,43.08 %,50 %,59.23 %,51.54 %,存在高几率的虚警、漏报和混淆等,故障识别率低,无法满足风机故障状态辨识和诊断的要求。所以本文的试验用5 个电涡流传感器同时对各风机运行状态下轴承不同位置不同方向上的振动信号进行测量,对5 个测点同一时间的振动信号进行综合分析,得到风机每种状态下的符号动力学信息熵特征向量如下文所示。
3.2.2 符号动力学信息熵特征提取

图5 各风机运行状态下第3 个测点振动信号的Hk值随α 的变化曲线Fig.5 The Hk - αcurve of different vibration signals of the third measuring point of each fan running state

图6 各风机运行状态下第4 个测点振动信号的Hk值随α 的变化曲线Fig.6 Fig.6 The Hk - αcurve of different vibration signals of the fourth measuring point of each fan running state
试验采集了13 × 5 × 20 个振动样本,由于采样点数为512,所以每个振动信号为x(1),x(2),…,x(512)共512 个点。取权重α = 0.05,提取每个信号的符号动力学信息熵,构建风机每种状态下的符号动力学信息熵特征向量为

式中:Hk1,Hk2,…,Hk5分别表示风机每种状态下同一时间5 个测点振动信号的符号动力学信息熵。最终得到13 种状态下260 个符号动力学信息熵特征向量,这里仅列出风机每种状态各一个符号动力学信息熵特征向量,如表3 所示。

图7 各风机运行状态下第5 个测点振动信号的Hk值随α 的变化曲线Fig.7 The Hk - αcurve of different vibration signals of the fifth measuring point of each fan running state
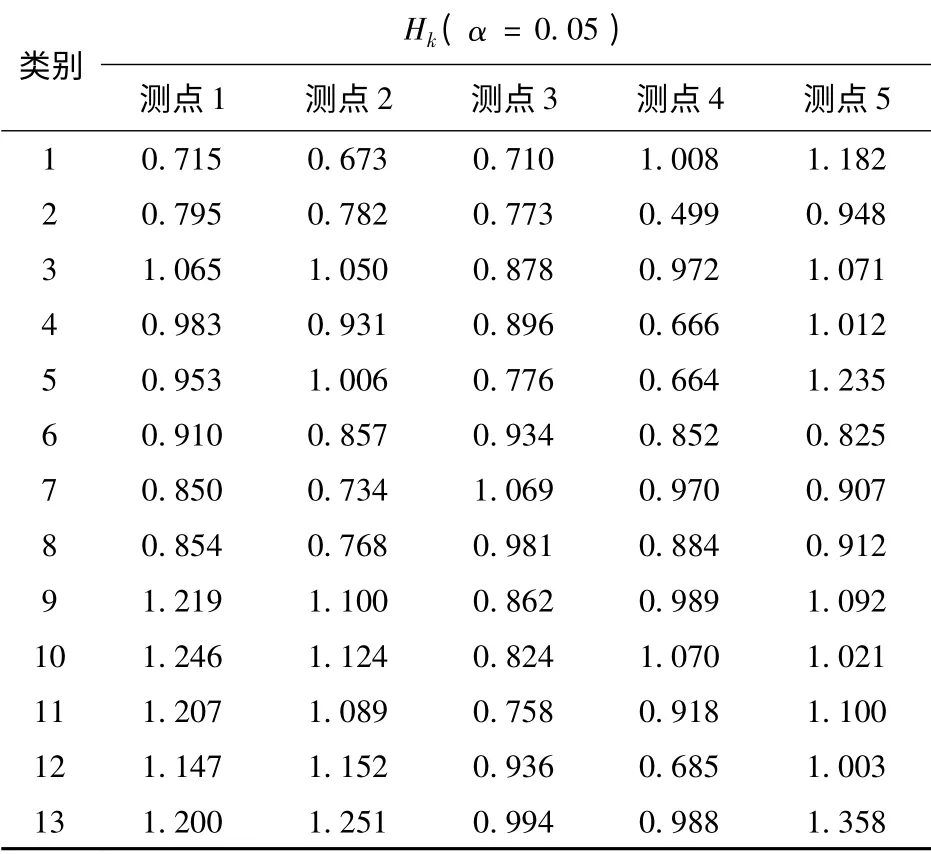
表2 当α = 0.05 时风机各类振动信号的Hk值Tab.2 The Hk value of vibration signal of each fan running state when α = 0.05

表3 风机各运行状态的符号动力学信息熵特征向量Tab.3 The symbolic dynamics entropy eigenvector of each fan running state
3.3 基于符号动力学信息熵特征向量和改进BP神经网络的风机机械故障诊断
3.3.1 标准BP 网络与改进BP 网络特性比较
为了检验改进的BP 神经网络是否优于标准BP 神经网络,本文对这两种网络在相同参数设置、相同网络结构的条件下进行仿真。将表3 中网络的输入值和目标输出作为两种网络的输入与输出。这两种网络进的仿真结果:对于相同的精度要求,标准BP 网络由于陷入局部极小而经过10 000次训练仍然未达到期望误差最小值,而改进BP 网络经过305 次训练就达到期望误差最小值;标准BP 网络和改进BP 网络的训练时间分别为39 s 和1 s;标准BP 网络和改进BP 网络的网络输出与目标输出的相关系数r 的值分别为0.154 18和0.999 95,r 越接近于1,表示网络输出与目标输出越接近,网络的性能越好。可见,改进BP 网络能够有效提高网络的训练速度,缩短网络的训练时间,改善网络的收敛性能,避免网络陷入局部极小值,并且改进BP 网络比标准BP 网络具有更加良好的逼近性能。
3.3.2 基于符号动力学信息熵和改进BP 神经网络的故障诊断
改进BP 神经网络的参数设置:输入层、隐层和输出层神经元数分别为5,15 和13;通过多次训练与测试,网络输入层和隐层、隐层和输出层的神经元传递函数分别为tansig(),logsig()时,诊断准确率最高;选择带动量项和学习速率自适应的神经网络训练方法,训练的期望误差最小值为le -5;最大循环次数2 000;学习速率η 为0.01;动量因子为0.90。采用有导师学习,其中“1”表示风机运行所处的状态,“0”表示非风机运行状态。
上文已经得到13 种状态下260 个符号动力学信息熵特征向量S 来划分表1 中13 类风机运行状态,形成改进BP 神经网络的样本集。若网络的测试样本如表3 所示,则改进BP 网络的输出值如表4 所示,与表3 中网络各输出节点的目标输出值相比较,得到本次诊断的准确率。若取13 种状态130 组符号动力学信息熵特征向量作为训练样本,其中每种状态各取10 组,将剩下130 组作为测试样本输入改进BP 神经网络进行诊断,准确率为99.23 %,如图8 所示,有一个轴承松动(全松小)状态的样本被误诊为轴承松动(左侧松动)状态。同样以剩下130 组作为测试样本输入标准BP神经网络进行诊断,准确率只有61.54 %,表明:改进的BP 神经网络减少了训练次数,提高了学习效率,而且能有效地抑制网络陷于局部极小,大幅度地提高了BP 神经网络用于风机故障诊断的准确率。
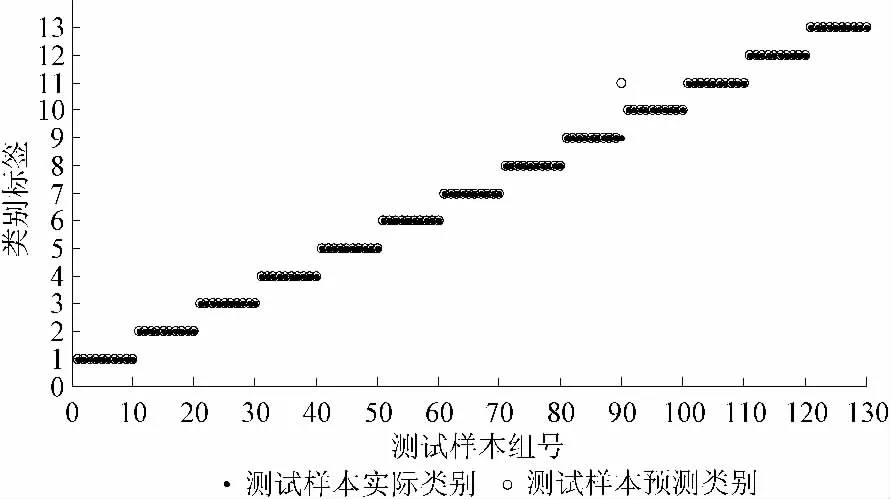
图8 基于5 个测点振动信号符号动力学信息熵综合分析的风机故障诊断结果图Fig.8 Fault diagnosis chart based on the comprehensive analysis of symbolic dynamics entropy of five measuring points vibration signal
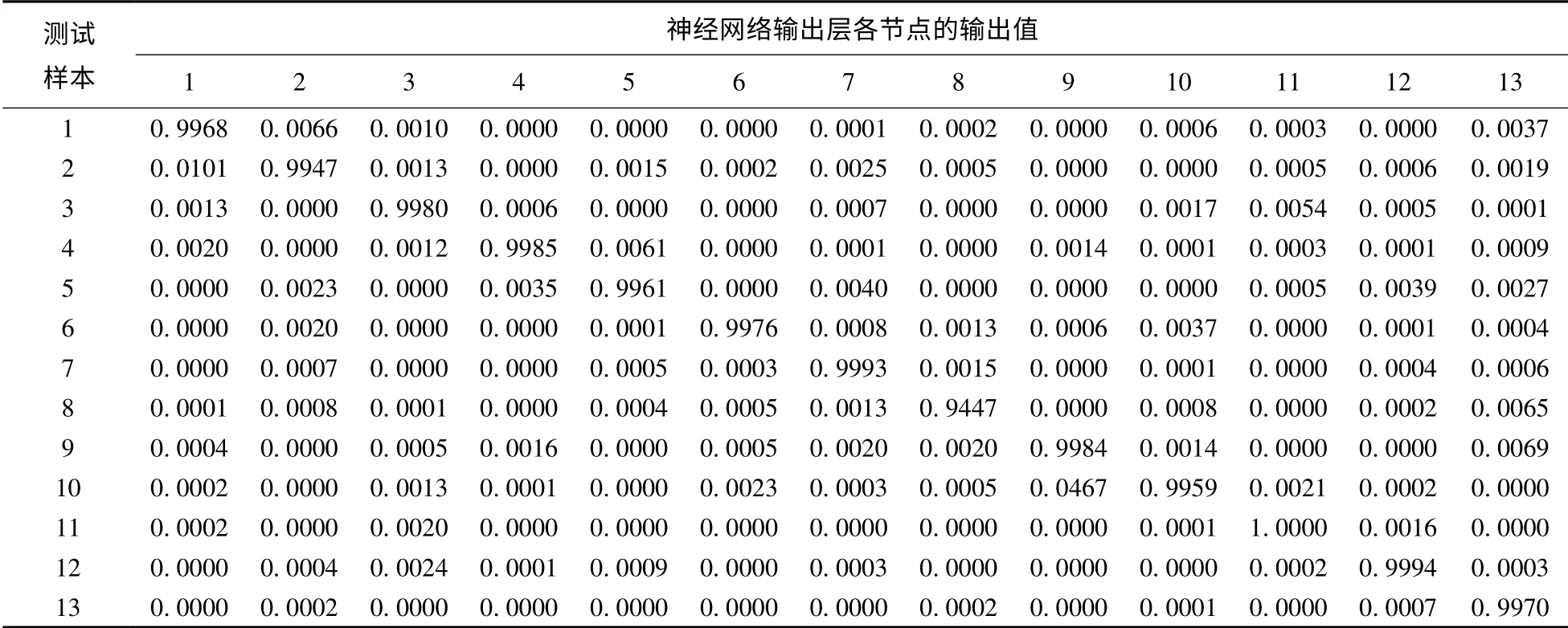
表4 改进BP 神经网络输出值Tab.4 Output value of improved BP neural network
对于本文风机机械故障诊断问题,对比基于小波包能量特征和改进支持向量机的诊断方法:在4-73No.8D 风机实验台上,对13 种不同运行状态下的振动信号进行采集,利用小波包对振动信号进行消噪、分解与重构,提取其小波包能量特征,得到了风机各运行状态下多测点信息融合的小波包能量特征向量,最后利用改进支持向量机对特征向量样本集进行训练与测试,实现了风机机械故障的分类诊断。如图9 所示,其故障诊断准确率为94.6 %,130 个测试样本中只有7 个样本出现误诊,即:2 个平行不对中(小)状态的样本被误诊为平行不对中(大)状态;2 个轴承松动(全松小)状态的样本被误诊为轴承松动(全松大)状态;1 个轴承松动(全松小)状态的样本被误诊为轴承松动(左侧松动)状态;2 个轴承松动(左侧松动)状态的样本被误诊为轴承松动(全松小)状态。
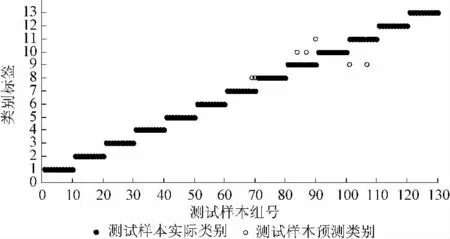
图9 基于5 个测点振动信号小波包能量特征综合分析的故障诊断结果Fig.9 Fault diagnosis chart based on the comprehensive analysis of wavelet packet energy feature of five measuring point vibration signal
对比图8 和图9 的诊断结果,基于符号动力学信息熵和改进BP 神经网络的风机机械故障诊断方法能够更加有效地对风机不同机械故障的类别、严重程度和发生位置进行诊断。
4 结 论
(1)本文通过实验模拟了13 种不同的风机运行状态,并得到各状态充足的振动信号;对每个振动信号进行符号动力学信息熵分析,得到260 组风机运行状态特征向量S 作为故障诊断的样本集。
(2)针对标准BP 神经网络的缺点,本文结合增加动量项和自适应调节学习率两种方法对标准BP 算法进行改进。通过标准BP 网络与改进BP网络的性能比较,说明:改进BP 网络能够有效提高训练速度,缩短训练时间,改善收敛性能,避免网络陷入局部极小值,并且比标准BP 网络具有更加良好的逼近性能。
(3)提出了基于符号动力学信息熵特征向量S 和改进BP 神经网络的风机机械故障诊断方法,准确率高达99.23 %,表明:振动信号的符号动力学信息熵不但可以作为风机故障诊断的特征,而且比小波包能量特征更简单有效;该诊断方法能有效地对风机不同机械故障的类别、严重程度和发生位置进行诊断。
[ 1]Yan R Q,Gao R X.Approximate entropy as a diagnostic tool for machine health monitoring [J].Mechanical Systems and Signal Processing,2007,21(2):824 - 839.
[2]赵志宏,杨绍普.基于小波包变换与样本熵的滚动轴承故障诊断[J].振动、测试与诊断,2012,32(4):640 - 644.
[3]肖方红,闫桂荣,韩雨航.双稳随机动力系统信号调制噪声效应的数值分析[J].物理学报,2004,53 (2):0396 -0400.
[4]李洪伟,周云龙,任素龙,等.符号动力学信息熵在气液两相流型电导信号[J].化工学报,2012,63 (11):3486 - 3492.
[5]宋爱玲,黄晓林,司峻峰,等.符号动力学在心率变异性分析中的参数选择[J].物理学报,2011,60 (2):020509.
[ 6]张萍萍,姚万业,杨明玉,等.基于改进BP 算法的发电机组振动故障诊断技术[J].华北电力大学学报,2003,30 (6):34 - 37.
[ 7]刘吉臻,牛征,牛玉广.一种基于RBF 神经网络的非线性PCA 故障检测方法[J].华北电力大学学报,2005,32 (5):27 - 31.
[8]马良玉,马杏斋,冯志杰.基于径向基概率神经网络的高压加热器故障诊断[J].华北电力大学学报,2007,34 (5):81 - 84.
[ 9]Kurths J,Voss A,Saparin P,et al.Quantitative analysis of heart rate variability [J].Chaos,1995,(5):88 - 94.
[10]Parlitz U,Berg S,Luther S,et al.Classifying cardiac biosignals using ordinal pattern statistics and symbolic dynamics[J].Computers in Biology and Medicine,2012,(42):319 - 327.
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
一重技术(2021年5期)2022-01-18
能源(2018年5期)2018-06-15
能源(2017年9期)2017-10-18
雷达学报(2017年6期)2017-03-26
现代工业经济和信息化(2016年12期)2016-05-17
池州学院学报(2015年3期)2016-01-05
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
安徽冶金科技职业学院学报(2015年3期)2015-12-02
郑州大学学报(理学版)(2014年2期)2014-03-01
