
基于超声波测距的车辆音量调节系统
2013-07-19 09:22李缓媛黄敏捷刘乾枭王超一
实验室研究与探索 2013年7期
李缓媛,张 强,黄敏捷,傅 倩,刘乾枭,王超一,刘 坤
(上海工程技术大学,电子电气工程学院,上海201620)
0 引 言
目前市场上的倒车雷达都是外置的,与音响不连在一起,倒车碰到障碍物时发出蜂鸣声会和车内音响音乐混淆,无法清晰地提醒驾驶员,不能100%地保证倒车安全。而车辆安全调节音量系统通过传感器对靠近车辆周围物体的距离,速度进行预判,自动减少和恢复驾驶室内的音响播放状态,能以声音的改变告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
1 基本原理及设计思路
1.1 基本工作原理
车辆安全调节音量系统:①适用于行驶过程中,例如后方车辆贴近,想从侧方超车,前方车内播放的音乐电台减弱了驾驶员的注意力,没有察觉,这时系统积极响应,减小音量,并发出蜂鸣警告声;②在车内播放音乐时进行倒车,当传感器探测到有人或物体时系统工作。汽车倒车时,由单片机驱动超声波传感器测距,发出信号并接受数字信号,通过数字电位器转化成电阻值,再进行放大,从而改变音响的电阻值,达到改变音量的效果。
1.2 设计思路
该系统作为一个安全装置,具有实际的应用潜力,即它可以承担一些需要注意力、判断力和技术性的工作,从而降低驾驶的强度,减少驾驶员的负担,特别在超车这种思想高度集中的状态下,适当的减轻音量会更有利于驾驶安全。因此具体的传感器位置及单片机位置如图1 所示,汽车侧方障碍物信号检测模拟图如图2 所示。
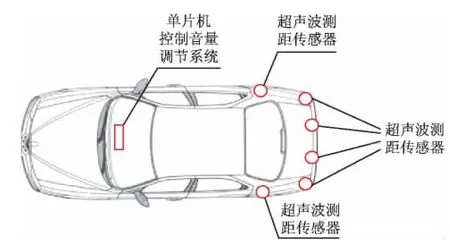
图1 传感器及单片机位置设计图
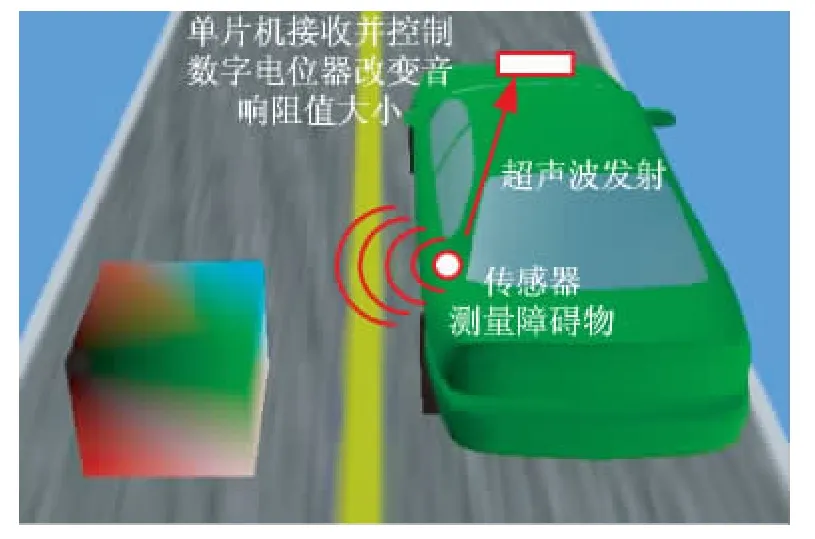
图2 汽车侧方障碍物信号检测模拟图
2 软硬件设计
2.1 系统硬件设计
2.1.1 测距传感器HC-SR04
HC-SR04 超声波测距模块可提供2 ~400 cm 的非接触式距离感测功能,测距精度可达到3 mm,模块包括超声波发射器,接收器与控制电路。
其基本工作原理如下,实物图如图3 所示。①用IO 口TRIG 触发测距,给至少10 μs 的高电平信号。②模块自动发送8 个40 kHz 的方波,自动检测是否有信号返回。
通过IO 口ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间×声速(340 m/s))/2。
2.1.2 单片机(STC12C5A60S2)
STC12C5A60S2/AD/PWM 系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051 单片机,指令代码完全兼容传统8051,但速度快8 ~12 倍。内部集成MAX810 专用复位电路,2 路PWM,8 路高速10 bit A/D 转换(250 KB/s,即25 万次/s),针对电机控制,强干扰场合。实物如图4 所示。

图3 超声波测距传感器

图4 STC12C5A60S2 单片机
2.1.3 数字电位器(X9C103)
该电路由输入控制,计数器和译码器、非易失存贮器及 电阻阵列三部分组成输入控制部分类似一个可逆计数器。计数器的输出被译码后,就接通一个单接点的电子开关,从而把电阻阵列上的一个点连接到滑动输出端。在某种条件下,计数器的内容可以存贮到非易失性存贮器中,以便今后调用。电阻阵列中包含99 个单独的电阻,它们以串联的形式连接,在两个端点和每个电阻之间有一个电子开关,它能把该点的电位传输到滑动端。数控电位器:接受控制信号改变其阻值,调节音量(收音机音量调节采用的是电位器,会有一个动片在电阻膜上滑动,改变电阻,从而调节音量),实物引脚如图5 所示。

图5 X9C103 数字电位器引脚图
该器件推荐参数如下:①电源参数:3 ~5 V;②电源电流:1 mA;③滑动端电流:±1 mA(max);④滑动端电阻:40 Ω(1 mA 时);⑤端点间的电阻误差:±20%;⑥电阻分辨率:1%;⑦额定功率:1 mW;⑧噪声:<-120 Db/Hz(基准为1 V)。
2.2 系统软件设计
2.2.1 软件控制基本策略及传感器工作时序
当传感器监测的距离不同时,单片机也发出不同的信号来驱动电位器。
传感器在小于50 cm 距离时候,单片机改变电位器抽头,增大电阻直到在距离范围外。
传感器在大于50 cm 距离时候,单片机改变电位器抽头,减小阻值直到超出距离400 cm。
以上时序图(图6 所示)表明只需要提供一个10 μs 以上脉冲触发信号,该模块内部将发出8 个40 kHz周期电平并检测回波,一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。距离=高电平时间×声速/2,测量周期为60 ms 以上,以防止发射信号对回波信号的影响。
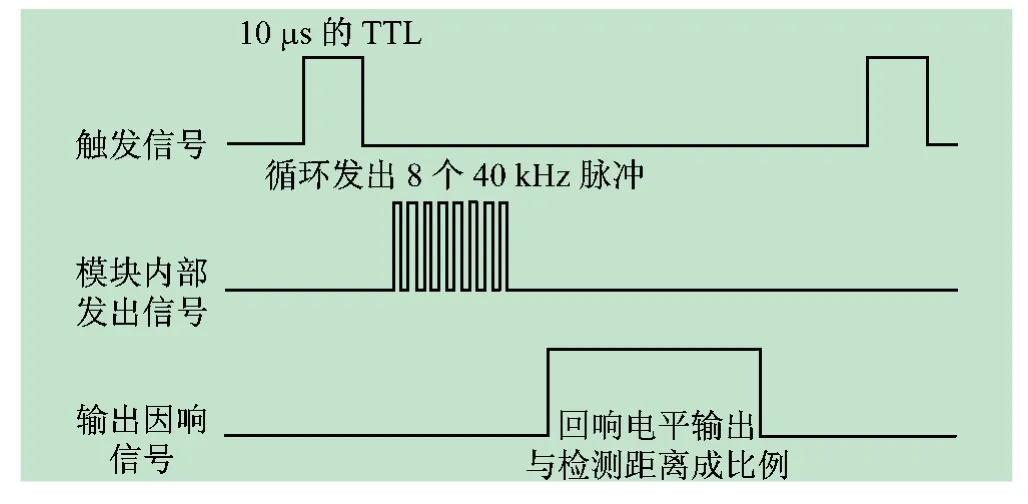
图6 测距传感器的工作时序图
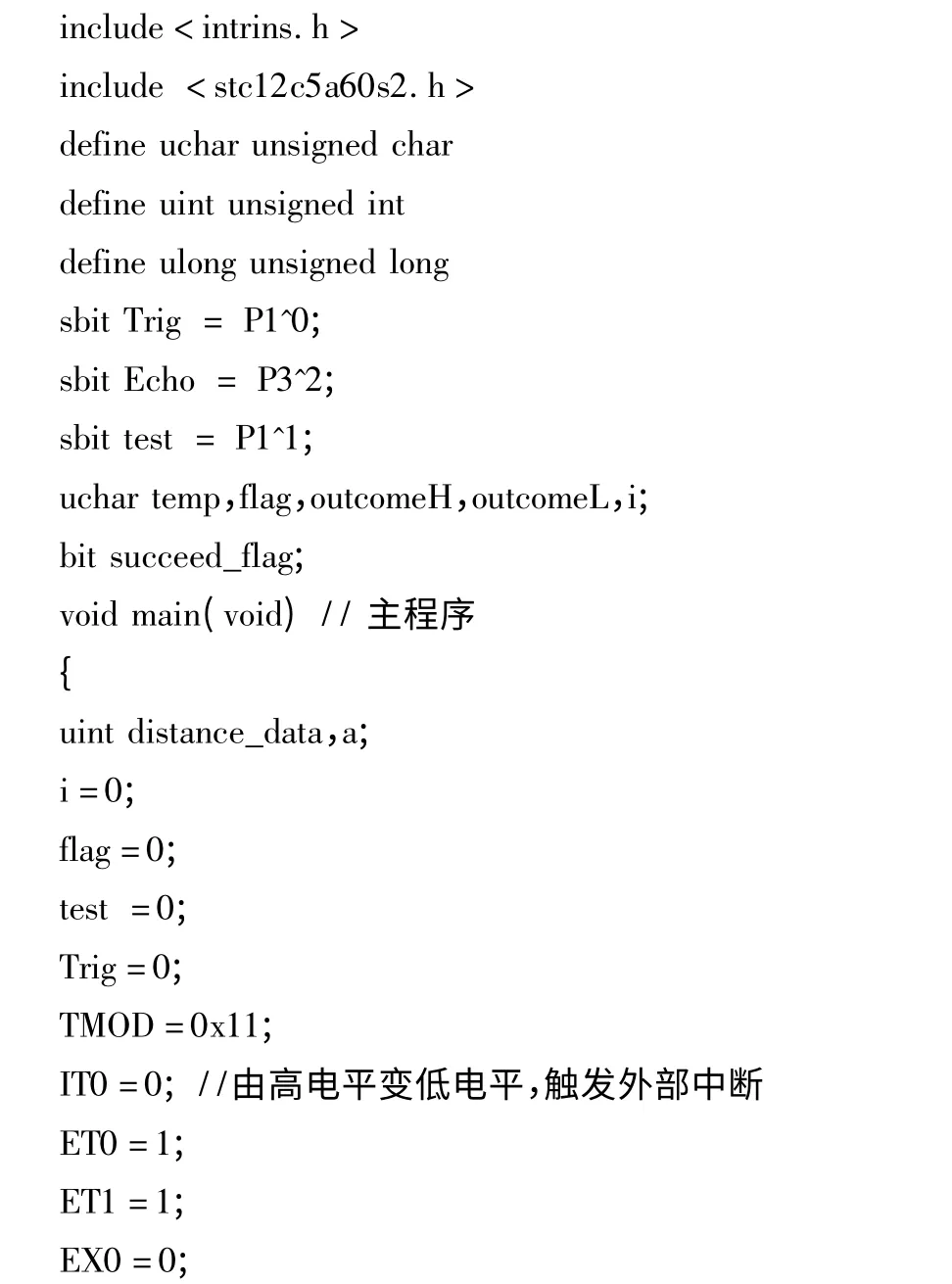
2.2.2 传感器部分主程序如下

3 系统硬件电路(如图7 所示)
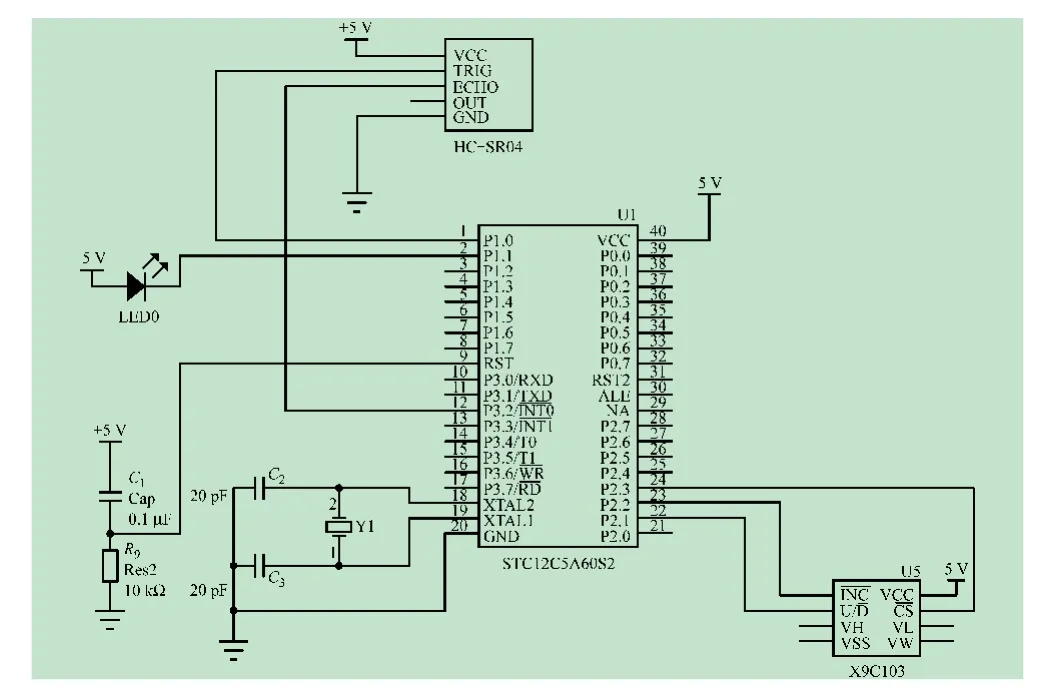
图7 系统硬件电路图
4 结 语
这是一款提升倒车安全系数的装置。测距传感器HC-SR04 测量倒车时传感器到障碍物的距离,并把接受到的回波信号传送给STC12C5A60S2 单片机。当STC12C5A60S2 单片机接收到回波信号时,LED0 灯亮,当单片机没收到回波信号时,LED0 灯暗。STC12C5A60S2 单片机把数字信号传递给数字电位器,由数字电位器转换成电阻信号,再进行放大,从而改变音响的电阻值,经测试该装置能够调节音响的电阻值,具有实际的应用价值。
[1] 李晓霞,江宗法.车载距离探测技术比较[J].自然科学版,2002,24(2):4-5.
[2] 杨明发.高性价比倒车雷达的研究[J]. 机电技术季刊,2008,13(1):30-31.
[3] 杨兴明,贾保柱,万 莉,等.一种新的倒车雷达系统的设计[J].大气与环境学学报,2008,19(2):3-12.
[4] 胡福云.基于单片机的超声波测距仪[J]. 科学咨询(决策管理),2008,11(8):21-23.
[5] 李茂山,龚建明.JJG928-1998 超声波测距仪[M]. 北京:中国计量出版社,2002:68-69.
[6] Carullo A,Parvis M. An ultrasonic sensor for distance measurement in automotive applications[J]. IEEE Sensors Journal,2001,1(2):143-145.
[7] 陈黎敏.传感器技术及其应用[M]. 北京:机械工业出版社,2010:128-134.
[8] 陈桂年.增强型8051 单片机实用开发技术[M].北京:北京航空航天大学出版,2010:208-215.
[9] 朱爱红,朱宁文.基于AT89C2051 的超声波测距系统[J]. 信息技术与信息化,2006,32(5):42-44.
[10] 王吉忠.车用单片机系统[M].北京:中国电力出版社,2009:44-45.
[11] 李良光,张宏群. 模拟电子技术[M]. 北京:清华大学出版社,2011:69-82.
[12] 谢婉青.集成运算放大器应用原理[M].北京:清华大学出版社,1997:145-146.
[13] 张红润,刘秀英,张亚凡. 单片机应用设计200 例[M]:北京:北京航空航天大学出版社,2006:208-210.
[14] YAMADA M HAMAMATSU. Japan,Car audio apparatus[P],United States Patent(5349326),2008.09
[15] 王之道,周 靖,刘 旭.基于51 系列单片机的车用数显报警系统[J].科技情报开发与经济,2009.19(9):113-115.
猜你喜欢
小学生作文(低年级适用)(2022年11期)2022-12-02
山西电子技术(2022年1期)2022-02-28
电脑爱好者(2020年18期)2020-09-26
科技传播(2019年15期)2019-08-22
World Journal of Hepatology(2019年5期)2019-06-20
家庭影院技术(2017年9期)2017-09-26
电子技术与软件工程(2017年2期)2017-03-15
中国信息技术教育(2016年23期)2017-01-03
西部广播电视(2016年16期)2016-11-09
电脑爱好者(2015年9期)2015-05-15
