
典型二阶系统控制器设计
2013-07-12 08:50哈斯花
赤峰学院学报·自然科学版 2013年2期
哈斯花
(赤峰工业职业技术学院,内蒙古赤峰024000)
典型二阶系统控制器设计
哈斯花
(赤峰工业职业技术学院,内蒙古赤峰024000)
主要研究了典型二阶系统控制器的设计方法.首先分析了二阶系统的建模过程,然后设计了PID控制器,给出了校正后单位阶跃响应图、校正后伯德图、Simulink仿真、最后给出了稳定性分析.经过分析可知,系统在没有经过校正前不满足要求,经过PID校正后系统的稳态误差为零,调整时间缩短,反应速度快,具有较强的抗干扰性和较好的鲁棒性.
二阶系统数学模型;PID控制器;系统稳定性
1 建立系统的数学模型
设输出气压为p(t),输出位移x(t),有牛顿第二定理可得:
pA-kx(t)-bv=(M+m)a
代入数据M=0.08kg,m=0.02kg,k=4N/m,b=0. 04Ns/m,A=0.002m并整理后得:

对上式做拉氏变换可求出系统的开环传递函数:
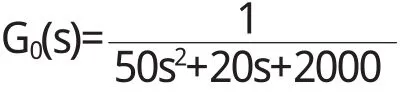
进一步可求的系统的闭环传递函数:

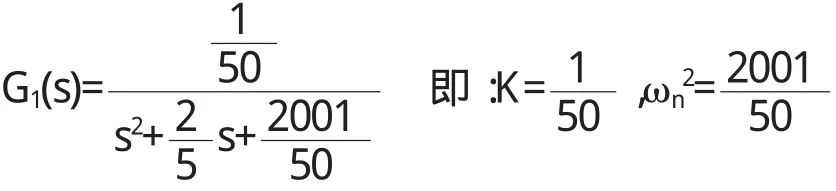
求系统的闭环极点:
闭环传递函数的特征方程:

可求出闭环极点

当输入为单位阶跃函数时即r(t)=1(t),R(s)=1/2特征值为是特征根的实部,代入数据可得σ=0.2,-σ=-0.2是特征根的虚部,称为阻尼振荡频率.代入数据可得:ωd=6.33
s 1 到s 平面坐标原点的距离为ωn
s 1 向量与s 平面负实轴的夹角β 称为阻尼角.
β=arccosξ β=88°(已接近零阻尼状态)
-σ=-0.2 ωd=6.33 β=88°绘制复平面二阶系统闭环极点分布图:
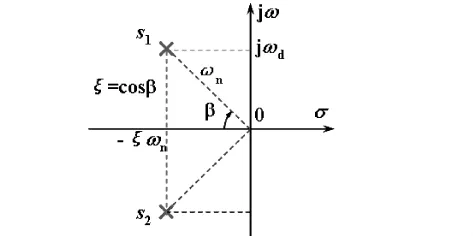
如图所示两个共轭复根在s平面的左半平面虽然接近虚轴但由上图可知系统仍是稳定的.
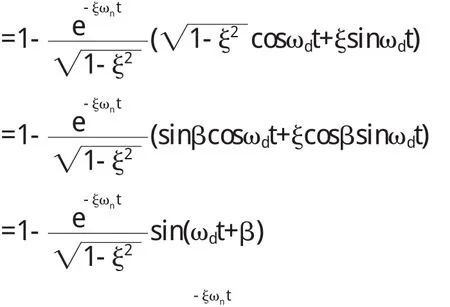
系统的输入为单位阶跃函数
代入公式得当r(t)=1(t)时,稳态误差ess=1
综上所述原系统不满足性能要求

原系统的阶跃响应曲线如下图:
原系统的伯德图如下:
由性能要求可以反求出系统最终的阻尼比和角频率:

2 设计控制器
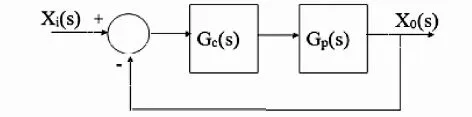
原系统的阻尼比为0.03已接近零阻尼状态,所以需要通过设计控制器增加系统的阻尼比.故在控制器中加入比例微分环节,微分控制规律能反应输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性.原系统为0型系统,在输入为r(t)=1(t)时存在稳态误差,需要在控制器中加入积分环节,PI控制器相当于在系统中增加了一个位于原点的开环极点,同时也增加了个位于S左半平面的开环零点.增加的负实零点用来提高系统的阻尼程度,缓和PI控制器极点对系统稳定性产生的不利影响.位于原点的极点可以提高系统的型别,即将系统提高到Ⅰ型,以消除或减小系统的稳态误差,改善系统的稳态性能.单位反馈系统框图如下:
PID校正计算:
PID控制器的传递函数Gc(s)=Kp[1+1/Tis+Tds]其中Kp为可调比例系数
Ti为可调积分时间常数Td为微分时间常数
校正后系统的开环传递函数为

单位负反馈闭环传递函数为:

假设得到的闭环传递函数三阶特征多项式可分解为

令对应项系数相等,有
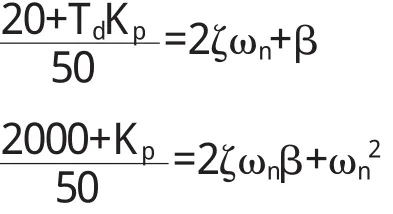
可求得PID校正所需的参数Kp,Ti,Td
校正后系统的特征多项式:

特征多项式不缺项,列出劳斯表:
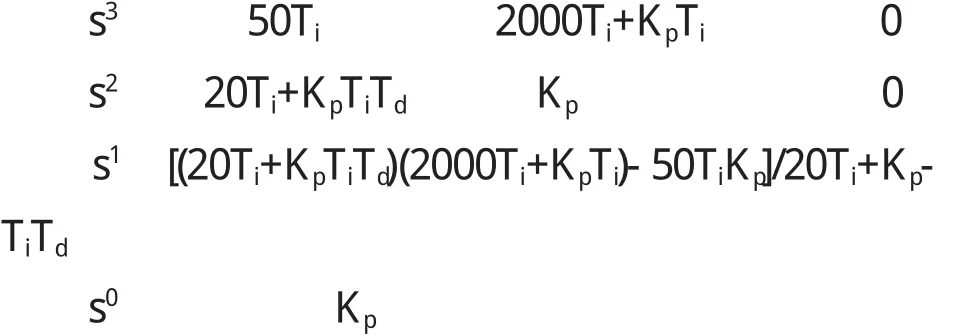
由劳斯表可知系统稳定.
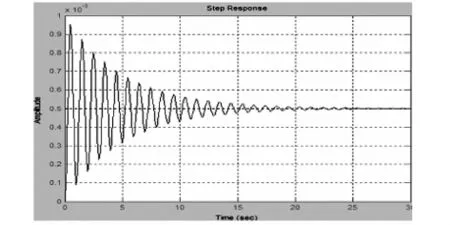
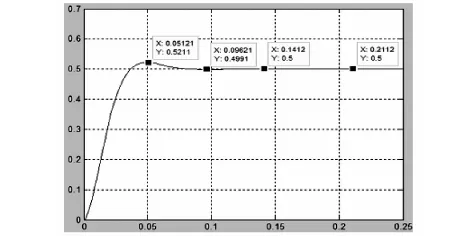
校正后单位阶跃响应如下图:
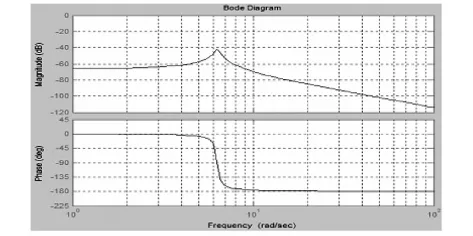
校正后得伯德图如下图:
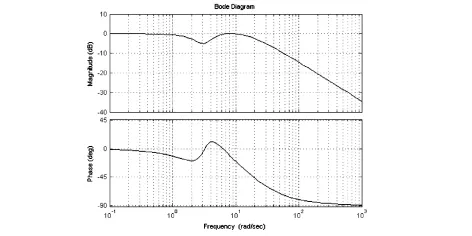
由校正后的时域响应曲线和频域响应伯德图可知:校正后系统的性能指标满足要求.所以控制器的传递函数为Gc(s)
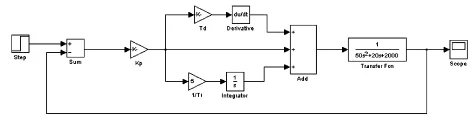
3 Simulink仿真
4 稳定性分析
质量变化对系统的稳定性影响较大,但质量的变化,系统仍能在调整时间内并在允许误差范围内达到稳定,系统的鲁棒性较好.现在令在1s时系统受到一个脉冲信号的干扰,经实验证明,此时系统的响应曲线较平滑且系统最终能回到平衡位置,达到稳态,抗干扰能力强.
5 结论
经过分析可知,系统在没有经过校正前不满足要求,经过PID校正后系统的稳态差为零,调整时间缩短,反应速度快,具有较强的抗干扰性和较好的鲁棒性.这说明P控制器实质上是一个具有可调增益的放大器.在信号变换过程中,P控制器只改变信号的增益而不影响其相位.在串联校正中,加大控制器增益KP,可以提高系统的开环增益,减小系统稳态误差,从而提高系统的控制精度,但系统的相对稳定性,甚至可能造成闭环系统不稳定,因此在系统校正设计中,不能单独使用比例控制规律;微分控制可以增大系统的阻尼,使阶跃响应的超调量下降,调节时间缩短,且不影响常值稳态误差及系统的自然频率.由于采用微分控制后,允许选取较高的开环增益,因此在保证一定的动态性能条件下,可以减小稳态误差,但是微分控制器只对动态过程起作用,而对稳态过程没有影响,且对系统噪声非常敏感,所以,单一的D控制器在任何情况下都不宜与被控对象串联起来单独使用;而I控制器可提高系统的型别,有利于系统稳态性能的提高,但积分控制使系统增加了一个位于原点的开环极点,使信号产生了900的相角迟后,于系统稳定性不利,因此,在控制系统的校正设计中,通常不宜采用单一的I控制器.所以系统采用了PID控制器,达到了系统的控制要求.
〔1〕夏德钤,翁贻方.自动控制理论[M].北京:机械工业出版社,2007.
〔2〕杨叔子,杨克冲,等.机械工程控制基础[M].武汉:华中科技大学出版社,2005.
〔3〕薛安克,彭冬亮,等.自动控制原理[M].西安:西安电子科技大学出版社,2004.
〔4〕葛哲学,等.精通matlab[M].北京:电子工业出版社,2008.
TP273+.4
A
1673-260X(2013)01-0031-03
猜你喜欢
燃料化学学报(2022年5期)2022-05-30
科教导刊·电子版(2022年5期)2022-03-19
测控技术(2018年7期)2018-12-09
天津教育·下(2018年9期)2018-07-13
光学精密工程(2016年4期)2016-11-07
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
电测与仪表(2014年11期)2014-04-04
中国药房(2013年41期)2013-12-03
电力自动化设备(2013年11期)2013-09-18
