基于LabVIEW的液压伺服测试系统研究
2013-07-07 11:22:04黄永花
机电信息 2013年6期
黄永花
(广东韶钢松山股份有限公司,广东 韶关 512123)
0 引言
液压测试系统中包含了信号的采集与控制、信号的分析与处理、结果的表达与输出。传统仪器的这些功能块都是以硬件的形式存在的。虚拟仪器系列化软件将传统仪器的3大功能块全部放在PC机上来实现,在PC机上插数据采集卡,然后用软件在屏幕上生成仪器面板,用软件来进行信号分析,在软件生成的界面上显示结果,实现传统仪器功能。也就是说,利用PC机强大的图形环境和在线帮助,建立中英文界面的虚拟仪器面板,完成信号采集,数据分析与显示,代替传统仪器,改变传统仪器的使用方式,扩展仪器的功能,提高使用效率,大幅度降低仪器的价格。与传统仪器相比,虚拟仪器具有巨大的优越性,因此将虚拟仪器和伺服液压控制技术相结合的开发应用模式也将成为今后的发展方向。
1 液压伺服测试系统方案
在该测试系统中试验加载的执行部分也就是本系统的被控对象,它包括液压伺服阀(控制油缸)、比例溢流阀(控制油压)等,其作用主要是接受控制信号并将其转化为机械信号;信号比较、放大部分,包括PI伺服放大器的作用时将输入信号与反馈信号进行比较,得出偏差信号,并将偏差信号进行放大,转换为执行元件可直接接受的信号;传感器测量系统,它包括位移传感器、力传感器、压力传感器、温度传感器及其相关测量部分,其作用是拾取表征测试状态的各种信号或参数,并使之变成标准的电压信号;虚拟仪器部分,它是整个控制系统的核心部分,主要作用包括控制信号的产生、发送,测量数据的采集、显示、处理及分析,各种数据的存储和查询,标准报表的生成。系统控制框图如图1所示。
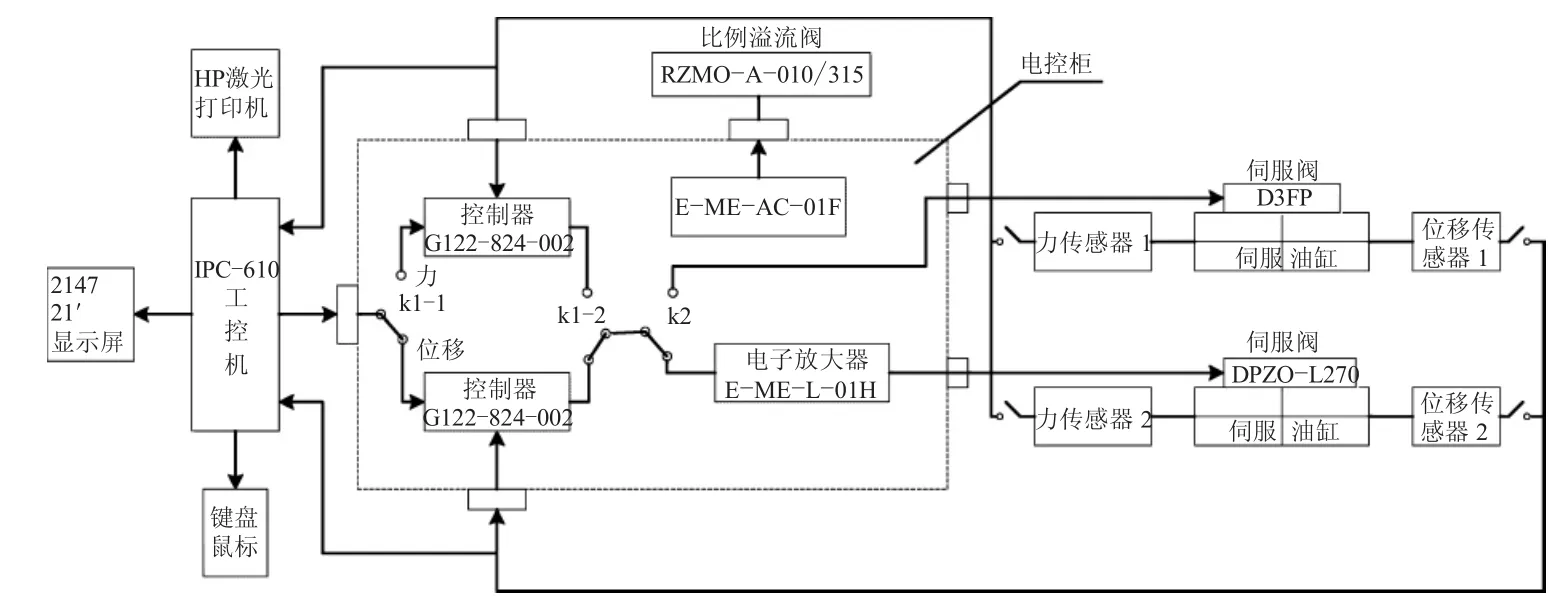
图1 系统控制框图
控制系统以计算机和控制卡所组成的虚拟仪器为核心,它可以发出各种控制信号,负责信号采集并进行数据计算、信号处理、数据存储等多种操作。控制卡发出的控制信号首先传给控制器,再经过放大器放大,最后传到伺服阀控制油缸动作。油缸的位置信号通过位置传感器一方面反馈给控制器形成闭环回路,另一方面反馈到数据采集卡由计算机对数据进行处理或保存。控制系统还选择位移闭环或力闭环2种闭环方式,实现力闭环或位移闭环。由于阻尼器动态性能试验要求1~33 Hz的试验波形,而且位移控制精度要求控制在0.1 mm以内,所以如何选择硬件系统显得至关重要。
本系统中由于要求有15吨级和60吨级2套液压驱动系统,因此必须采用2个伺服阀。15吨级试验台要求进行1~33 Hz的小振幅动态性能试验(幅值为1 mm),因此对伺服阀的动态响应要求较高。通过反复试验Parker公司的二级直动滑阀式伺服阀完全能够满足要求的响应速度。60吨级试验台要求进行1~5 Hz较大振幅动态性能试验(幅值为3 mm),因此对伺服阀的响应速度要求不高,而有较高的流量要求。考虑成本因素选用了Atos公司的二级双位移反馈伺服阀。
本系统所选用的是Atos公司的先导式比例溢流阀,它与电子放大器协同工作,输入信号经过放大器校准后作为驱动电流,先导阀又控制主阀芯的位置,从而最终实现流量调节。
考虑到系统响应速度和可靠性等因素,本系统采用计算机外反馈形式。通过实际考察由MOOG公司生产的G122-824型PI伺服放大器兼具PI控制和放大器的功能,具有稳定、可靠的特点,完全适合本系统。
传感器测量系统中采用BALLUFF公司的新一代BTL5系列微脉冲位置传感器,其不仅具有较高的精度等级,而且形状尺寸也便于内嵌于油缸内,既提高了安全系数又能减小振动误差,是一种比较理想的反馈元件。
由于力传感器要求量程大、精度高,采用进口产品价格比较昂贵,通过比较选用了某研究所生产的BK系列传感器,通过二次标定完全满足系统要求。
2 系统软件设计
虚拟仪器的关键部分是软件系统。本文为了充分发挥LabVIEW和Matlab的技术优势,合理使用系统资源,将控制程序中使用到的算法计算直接使用LabVIEW工具包实现,而将静态的结果分析放在Matlab中。这样既发挥了Matlab强大的计算功能,又避免了在LabVIEW控制程序中调用Matlab,从而使系统资源得到合理利用。
为了便于系统维护,增强程序的可读性,减少重复编程,整个软件系统采用模块化设计,共分为5大模块,如图2所示。其中自动测试模块为主模块,完成最主要的自动测试任务,并对采集到的数据进行必要的处理,再进行图形显示和存储,最后根据试验结果的满意程度由操作者自己决定是否生成报表。控制监控模块完成试验前的准备工作,打开所需的控制开关,根据实际需要切换选择按钮,最后按照设定压力值启动油泵使油压达到设定值,同时实时显示各元件的工作状态。手动调试模块主要用来进行设备调试,以及在安装阻尼器时进行微量调整。它可以以微量递增或递减的方式手动输出一定的电压信号,并实时显示当前的位移、力、温度和压力等信号。数据查询模块主要完成对已有数据库的查询功能,并把查询结果显示出来,供用户参考选用。辅助功能模块主要是对操作人员的权限限制,以防数据非法篡改。同时也提供了程序的帮助文件,以便操作者学习操作程序。
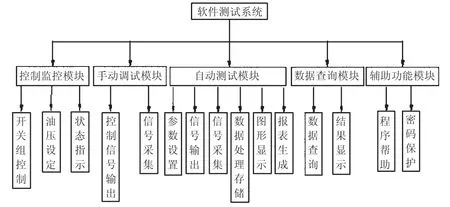
图2 程序结构框图
3 系统实验验证
为了测试实际系统的各项性能指标,本文特对实际系统进行了实验验证。通过实验数据可以得到实际系统的部分时域指标和频域指标,同时对系统阶次作出估计。通过实验一方面可以指导控制系统改进,优化控制策略;另一方面也可以验证推导模型的正确性。具体实验条件如表1所示。
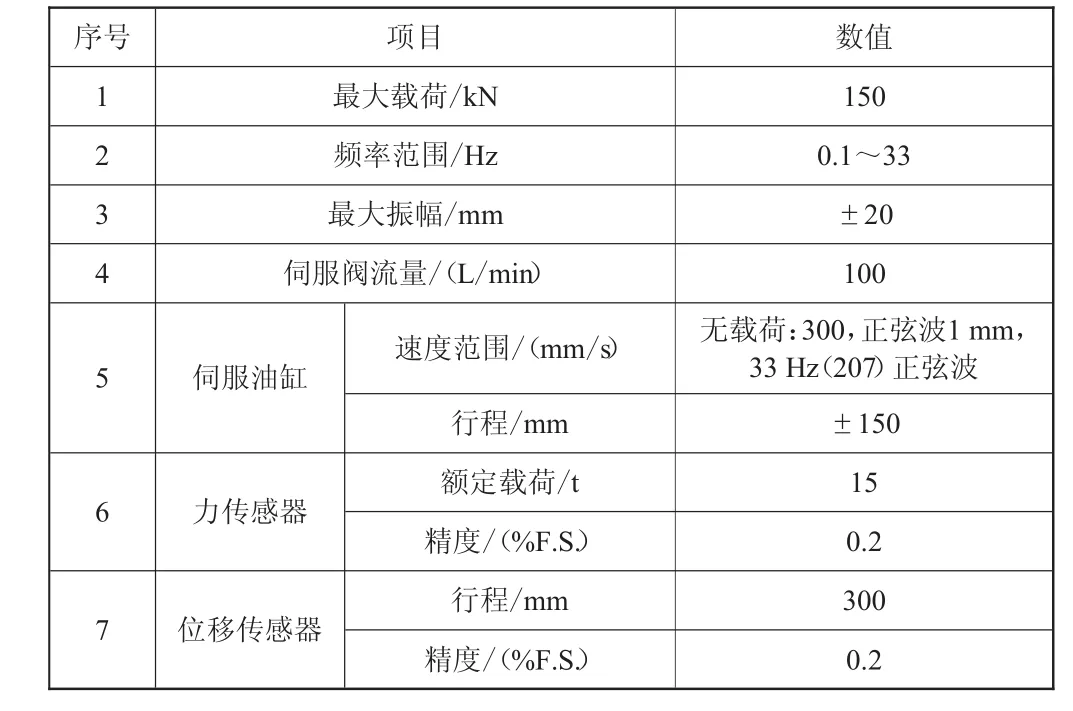
表1 实验条件
在上述实验条件下,本文从1~11 Hz输出幅值为1.4 mm的正弦波,然后分别记录下反馈波形并测算出实际幅值,得到如表2所示的数据表。
由以上数据可以方便地绘出开环系统的幅频特性,如图3所示。

表2 实验数据

图3 系统幅频特性
从图中可以看出,所绘出的幅频特性由明显的2部分斜率线段组成。理论推导出的数学模型由比例环节、积分环节和振荡环节组成,其幅频特性的特征与实验结果吻合。遗憾的是实验点数有限,精确推算或改进系统模型有一定的困难。
从图中还可以看出,对应于-3 dB的谐振频率为2.66 Hz,谐振频率较低,在要求的33 Hz频率下必定产生较大的衰减。针对这种情况可以采取适当调整开环放大系数、增加校正环节等控制策略加以弥补,以改善系统的整体性能。
4 结语
本文将LabVIEW结合伺服控制技术应用于阻尼器动态性能测试领域,充分发挥了虚拟仪器技术的优势,并将伺服控制技术有机结合起来,得到了良好的控制效果,为以后的工程应用提供了参考。该系统已经通过调试验收,经过一段时间的试运行,基本满足了用户的各项功能要求和技术指标,为其技术提高和市场开拓带来了巨大的推动力。
[1]王均功.液压阻尼器研究[J].液压气动与密封,1998(1):15~21
[2]张毅,周绍磊,杨秀霞.虚拟仪器技术分析与应用[M].机械工业出版社,2004
[3]李福义.液压技术与液压伺服系统[M].哈尔滨工程大学出版社,1995
[4]上海第二工业大学液压教研室.液压传动与控制[M].上海科学技术出版社,1990
[5]秦旻.基于虚拟仪器的液压测试分析系统的研究与开发[D].长安大学,2005
猜你喜欢
重型机械(2020年2期)2020-07-24 08:16:18
石油化工建设(2018年2期)2018-07-11 01:24:56
电子制作(2017年13期)2017-12-15 09:00:26
黑龙江电力(2017年1期)2017-05-17 04:25:05
电子制作(2017年1期)2017-05-17 03:54:33
山东工业技术(2016年15期)2016-12-01 05:31:11
凿岩机械气动工具(2016年2期)2016-11-11 07:34:04
环境科技(2016年5期)2016-11-10 02:42:12
电源技术(2016年9期)2016-02-27 09:05:28
系统工程学报(2015年2期)2015-02-28 19:53:43