
晶闸管软起动器的MATLAB仿真研究
2013-07-03 08:59姜静,史芸
制造业自动化 2013年9期
姜 静,史 芸
(1. 青岛工学院,青岛 266300;2. 青岛滨海学院,青岛 266555 )
0 引言
笼型转子异步电动机以结构简单、运行可靠、重量轻、价格便宜,在工业领域得到广泛应用。但是由于在启动时会产生较大的启动电流(一般为额定电流的5~7倍),降低了设备的使用寿命,同时过大的电流也会对电网产生冲击。目前,许多商用软起动器采用晶闸管交流调压器原理[1],其工作原理和控制框图如图1所示。其优点是结构简单、价格便宜,可实现小起动电流平滑起动;缺点是起动转矩小,不适合重载起动。因此,晶闸管调压软起动器通常用于起动转矩很小的中、大功率的风机、水泵类平方律负载的电力拖动系统中。
MATLAB是工程研发过程中普遍应用的一个商用软件[2,3],其功能十分强大,虽然不能替代实际的实验和调试过程,但合理应用它,可以大大节约实验所耗费的时间和费用。特别是,它常常被用来进行各种设计方案的可行性验证以及系统动态过程中对重要参数进行计算选择。
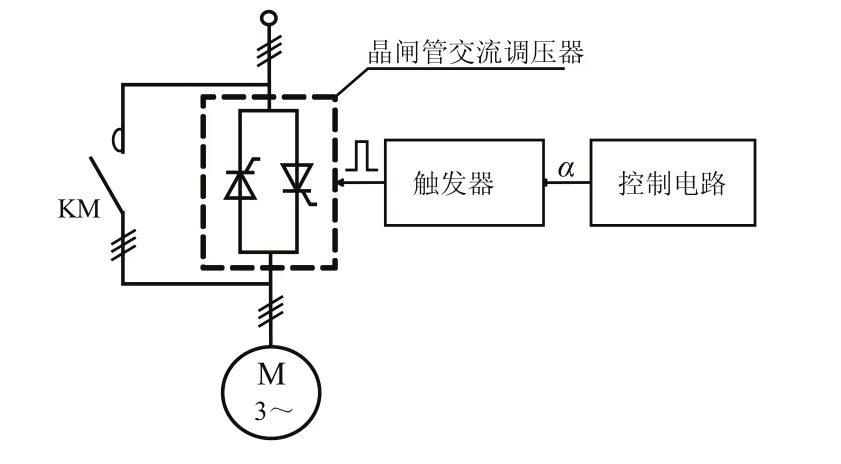
图1 感应电机软启动器框图
本文提出的晶闸管软起动器MATLAB模型适用于图1所示的感应电动机降压启动过程的分析。
1 软起动器的仿真模型
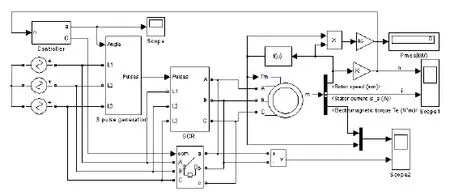
图2 异步电机软启动仿真模型
MATLAB仿真模型如图2所示。主要由电动机、电机测量部分、晶闸管调压器模块、相移触发器模块和控制电路模块组成。
3相晶闸管交流调压器模块子程序如图3所示,由于库元件中没有双向晶闸管器件,故采用2个普通晶闸管反向并联而成。
触发器是实现控制的重要部分。不带零线的3相交流调压器,只有当其中2相同时导通时,才有电流通过,因此,触发器的输出脉冲必须使用宽脉冲。触发器内部程序如图4所示。
电动机选择库内100马力样机,其特性具有笼型转子感应电机的典型特性。电机电磁转矩与电压的关系以及机械(平方率)负载特性如图5所示。
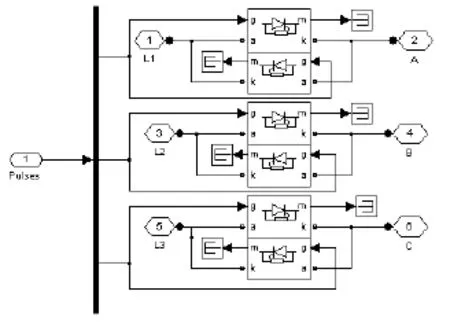
图3 晶闸管3相交流调压模块子程序
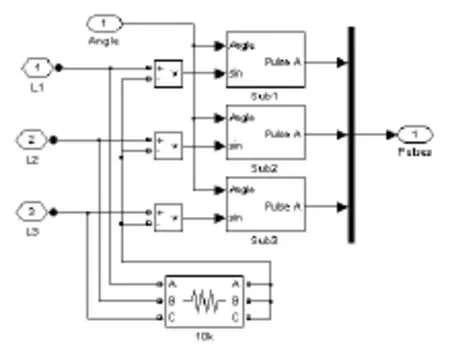
图4 脉冲发生器模块子程序
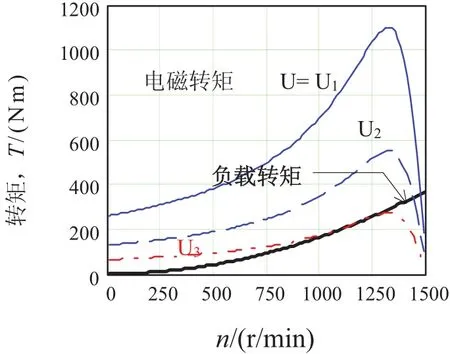
图5 电机电磁转矩和平方律负载转矩
2 仿真结果及分析
将图2开关(相当图1接触器KM)闭合,电机全电压起动,仿真结果如图6所示。可以看出,起动电流很大,峰值接近1600A;起动时间很短(为缩短仿真时间,电机的转动惯量采用很小的数值)。
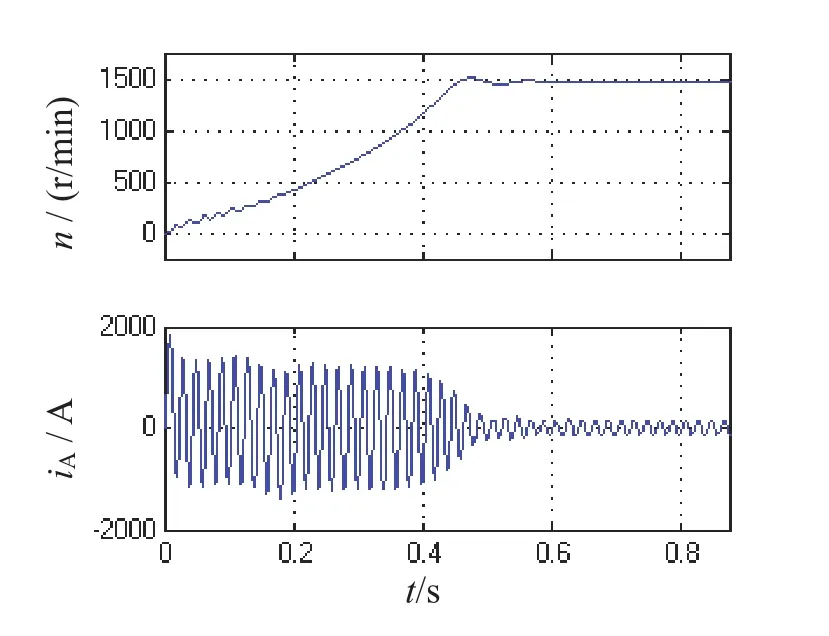
图6 全压直接起动转速与电流波形
图2模型是根据速度反馈量控制触发相移角,原则是速度高则角度小,速度低,角度大。由于触发角与输出的交流电压之间严重的非线性关系,只能采取尝试的办法,控制器的内部计算程序如图7所示。仿真结果见图8。
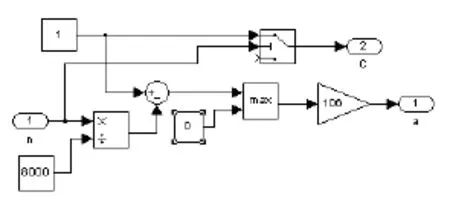
图7 控制器算法程序
图8~图9为采用速度反馈控制时的触发角和相应的转速和电流波形曲线。此时,动时起动电流减小为500A(峰值)左右,启动时间较直接起动增大许多。在起动电流和启动时间方面,通常需要做折衷处理。原则是:在满足实际负载起动(加速度、平稳性、快速性等)的要求前提条件下,控制电流不超过一定得范围。
另一种更为简单的方法是直接采用设定的触发角起动,经过一定的时间后将短路接触器闭合。此时,图2控制器的输出端α触发角由曲线或数据表给定;而由控制器C端(决定开关短接的合闸脉冲)由定时器决定。此时,无需转速测量反馈。
仿真结果如图10~图11所示。改变移相触发角曲线,起动过程就会相应改变。对照图5、图8线和图10,不难理解:为何给定的触发角在大角度(对应低电压)下停留较长的时间。
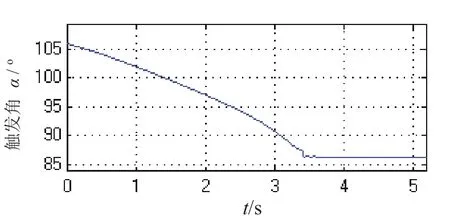
图8 触发角随速度的时间变化曲
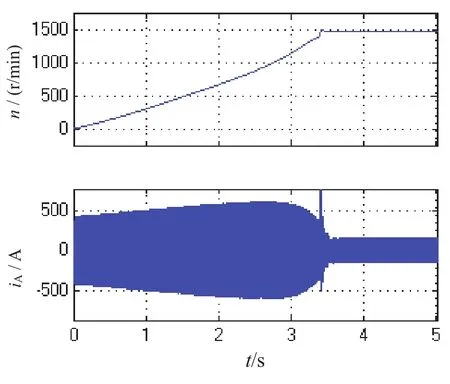
图9 软启动时的转速和电流波形
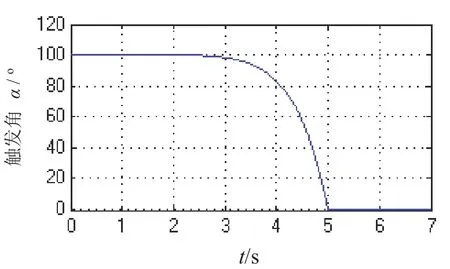
图10 触发角随时间变化的给定曲线
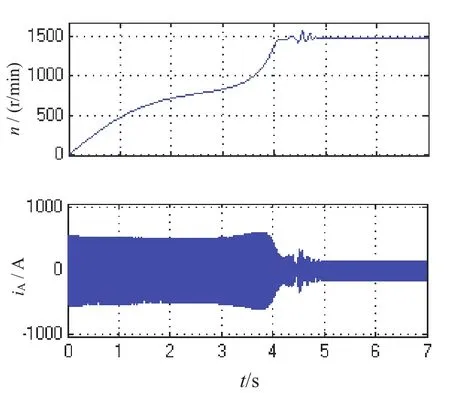
图11 软启动时的转速和电流波形
3 结论
给出了晶闸管降压软起动器的MATLAB仿真模型,通过仿真算例,可以看出,该模型可以比较方便地模拟不同参数的感应电动机、不同的机械负载、可以方便地添加不同的控制算法去模拟电动机起动全过程。
[1] 何致程.电动机电子保护器和软起动器应用指南[M].北京:机械工业出版社,2004.
[2] 洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.
[3] 郭斌.电机软起动器MATLAB仿真分析[J].兰州职业技术学院学报,2009,9(2):32-34.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
电气传动自动化(2022年1期)2022-03-24
煤气与热力(2021年4期)2021-06-09
石河子科技(2021年3期)2021-05-31
四川电力技术(2020年3期)2020-07-15
舰船电子工程(2019年11期)2019-11-28
煤气与热力(2019年3期)2019-03-18
电脑知识与技术(2018年22期)2018-11-26
通信电源技术(2018年10期)2018-11-19
舰船电子工程(2015年8期)2015-03-14
