
三相PWM整流器的研制
2013-06-23 09:50赵武玲彭树文王伟强
电气技术 2013年5期
赵武玲 彭树文 王伟强 姚 广
(核工业理化工程研究院,天津 300180)
传统变频器其整流器部分多采用二极管整流或可控硅整流方式,输入电流谐波大,对电网造成很大污染,工程应用中需要另外加装功率因数补偿装置,成本高,体积大。随着绿色能源的快速发展,脉宽调制(PWM)整流器技术以其能够实现网侧单位功率因数控制、输入电流高度正弦化、动态调整性能好等优点,成为电力电子行业的研究热点,也逐渐地被应用于变频器领域中。目前,PWM 整流器技术主要采用间接电流控制及直接电流控制两种方式,其中基于状态空间矢量脉宽调制(SVPWM)的直接电流控制方式,具有快速的动、静态调整性能及较高的直流电压利用率等优点,正成为 PWM整流器控制领域研究的热点。
本文采用基于SVPWM的直接电流控制方式,建立了以数字信号处理器(DSP)TMS320LF2407A为核心的数字控制系统,为提高系统工作的可靠性和稳定性,优化系统主电路结构设计、控制系统硬件电路设计及软件设计。
1 基于空间矢量的控制策略
如图1所示,电压型PWM整流器的拓扑结构与二电平逆变器结构类似。其主要部件由三相输入侧电感L,三对IGBT开关器件,直流侧输出电容C,以及负载Rdc组成。图中R代表电感线圈的等效电阻,一般可以忽略。

图1 电压型PWM整流器拓扑结构图
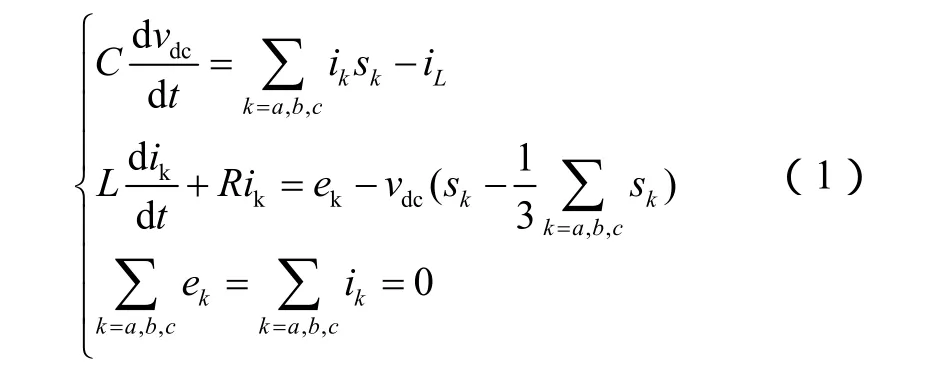
式中,sk为单极性二值逻辑开关函数(k=a, b, c);iL为整流器直流侧负载电流;vdc为直流电压。
通过坐标变换将三相静止坐标系(a,b,c)转换成以电网基波频率同步旋转的(d,q)坐标系,则三相对称静止坐标系中的基波正弦变量将转化成同步旋转坐标系中的直流变量,从而简化了控制系统的设计。
变换后,三相 PWM整流器在两相同步旋转坐标系(d,q)中的数学模型[1]为
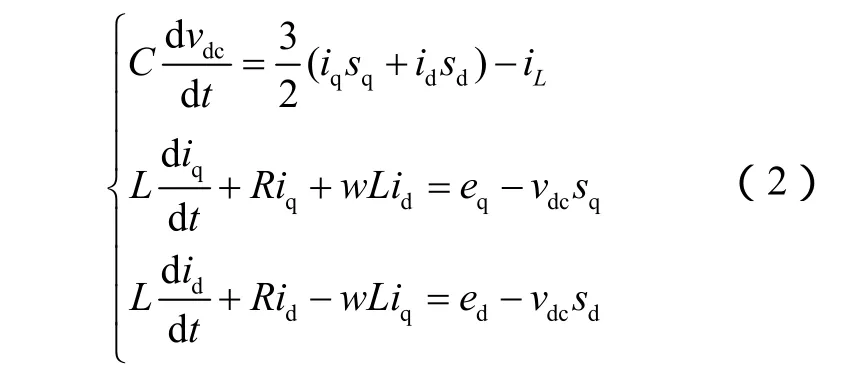
式(2)的后两项公式可写为

式中,p为微分算子。
由式(3)可以看到,整流器 d,q轴电流分量相互耦合。引入id,iq的前馈解耦控制对式(3)解耦,且id,iq电流环均采用PI调节器控制。可得两相同步旋转坐标系(d,q)下电流控制时的电压指令[1]为

式中,v*d、v*q为坐标系(d, q)中的三相VSR指令电压;i*d、i*q为坐标系(d,q)中的三相VSR网侧指令电流。
由式(4)得到控制量 v*d、v*q,即可通过SVPWM调制算法生成相应的 6路脉冲实现相应IGBT的通断控制。
基于SVPWM的双闭环控制结构如图2所示[2],电压外环控制直流侧电压,使直流电压保持参考电压值,而电流内环根据电压外环输出的电流指令进行电流控制,实现网侧单位功率因数控制。将电源三相电流变换到两相同步旋转坐标系(d,q)中,分别得到有功电流 id和无功电流 iq。有功电流指令i*d直接由电压外环得到,当PWM整流器工作在单位功率因数时,令无功电流指令i*q为0。利用式(4),通过电流环的调节运算获得三相PWM整流器交流侧指令电压矢量V*(v*d,v*q) ,并采用SVPWM算法,生成6路脉冲控制相应的功率开关管开通或关断,合成与v*d、v*q对应的整流器交流侧电压综合矢量U*,从而控制网侧电流,实现网侧电流正弦化。

图2 基于SVPWM的双闭环控制原理图
2 主电路结构设计
由图2可以看出,对于SVPWM整流器,为保证系统能够稳定可靠地工作,电网过零点的准确检测是至关重要的,一旦网侧过零点检测受到干扰,会直接导致整流器工作异常,直流电压瞬时上冲,严重时甚至会造成IGBT组件的损坏,因此本文优化了PWM整流器主电路结构设计,从而提高系统可靠性。
改进的PWM整流器主电路结构如图3所示,主要包括隔离变压器、预充电电路、滤波电容C、电抗器L、IGBT组件、直流电解电容等。其中隔离变压器实现电网与后级整流器的电气隔离,避免在电磁干扰严重的环境中地线环路的串扰对整流器的影响,保证整流器稳定可靠工作;滤波电容对输入侧电压进行滤波,以准确得到系统过零点,抑制高频信号对电压过零点干扰;预充电电路主要用于保护 IGBT组件,避免电网电压瞬间加载对IGBT的冲击,从而造成器件损坏。
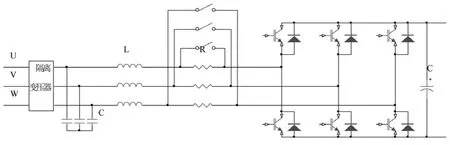
图3 三相PWM整流器主电路结构图
本文 IGBT组件选用英飞凌 FS50R12KT3(50A/1200V),由于没有相应的驱动板,驱动板选用塞米控SKHI61,输入侧滤波电容星型连接,电容值为4μF。
3 控制系统硬件电路设计
控制系统硬件电路以 DSP TMS320LF2407A为核心,主要包括直流电压采集,交流电流采集,过零点检测,锁相环同步电路等。控制系统采用空间矢量双闭环控制,需要准确跟踪电网相位,本文采用硬件锁相环电路,实现电网电压的相位跟踪,同时为了提高系统的抗干扰性,过零检测电路采用迟滞过零比较器。根据试验中遇到的问题,对各硬件电路进行优化。
1)直流电压采集电路。首先采用 ISO1002模拟信号变送器进行直流电压的采集,运行中发现在直流电压输出幅值较小(100V)时,负载切换前后直流电压能够保持恒定,但当直流电压输出比较大(600V)时,负载切换前后直流电压跌落20V左右,经过分析发现原因在于ISO1002模块受高频干扰严重,采集精度降低造成。因此直流电压采集电路改为直接采用差分电路再经过滤波电路消除高频干扰信号,送入DSP进行AD变换,经试验验证在直流电压输出 600V时,负载切换前后直流电压输出仅有 1V偏差,有效抑制了高频信号对直流电压的干扰,大大提高了系统的控制精度。
2)电流采集电路。电流信号经过电流传感器转变为电压信号,经过差分电路与基准电压将双极性信号转变为单极性信号,利用 RC滤波电路消除高频干扰后,再经过限幅电路送入DSP进行AD变换。
3)过零比较器。电路首先采用一般过零比较器,通过示波器的观察,发现在过零点有很多毛刺,很容易引起过零比较器误操作,造成后级锁相环失锁,系统失控。为了提高系统抗干扰性,采用迟滞过零比较器,比较阈值避开干扰严重的过零点,同时输入信号取自隔离变压器后端线电压 UAB,经过差分电路、滤波电路后送入迟滞过零比较器转变为方波信号。
4 控制系统软件设计
整流器控制方式采用 SVPWM 双闭环直接电流控制。控制系统的核心控制器选用 TI公司TMS320F2407A芯片,设定芯片工作频率为40MHz。DSP芯片内部资源使用 AD转换,EVB:Timer3采用连续上升下降方式计数,配合全比较单元、死区时间控制单元,生成 6路 PWM开关信号。每个工频周期分频系数为 144,即当工频为50Hz时,PWM脉冲频率为7.2kHz。
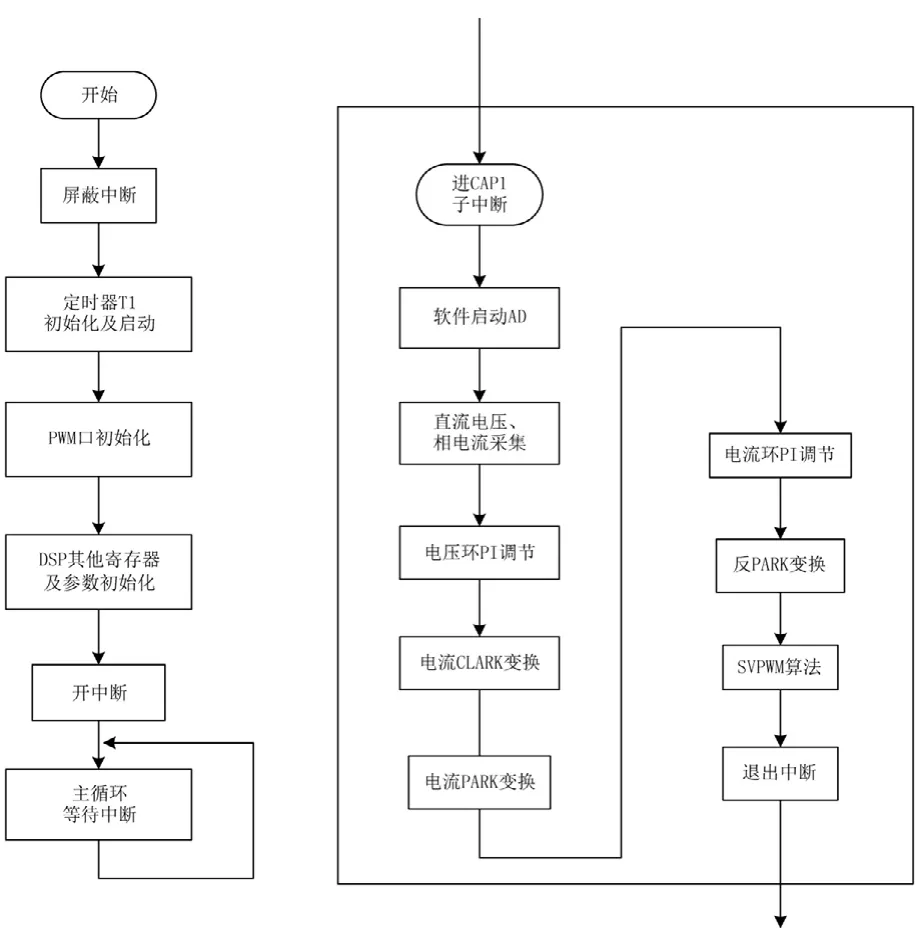
图4 控制程序流程图
DSP控制程序采用汇编语言编写,流程图如图 4所示。程序主要分为主程序及捕捉子中断CAP1。主程序主要进行定时器T1、PWM口、IO接口及其他一些DSP寄存器和参数的初始化。捕捉中断 CAP1主要完成整流器控制算法的实现,包括AD采样、Clark变换、PARK变换、电流电压环数字PI调节、反PARK变换及SVPWM脉冲宽度计算等,最后得出各个开关的导通时间。
为了实现电网相位跟踪,程序中预先保存了正弦表,每次进入 CAP1捕捉中断,通过计数值查表得到当前正余弦值,从而进行角度计算。由于系统采集线电压过零点,因此与相电压过零点会有30°偏移,另一方面隔离变压器及迟滞过零比较器亦造成过零点相角偏移,二者综合总的相角偏移量通过程序内部进行补偿,从而得到准确过零点,追踪电网相位。交流电流、直流电压等所有模拟信号的采样全部进行多次采集均值滤波实现软件抗干扰。
5 试验结果
通过以上分析,搭建一台3kW整流器试验样机,负载为 PWM逆变器,其中整流器主电路中电抗器参数为L=10mL,直流侧电容C=2200μF,系统采样频率与开关频率均为7.2kHz,输入电压380V,直流侧输出电压600V,滤波电容为4μF,逆变器输出电压为 380V,逆变器负载为感性负载,输出功率3kW。整流器带载考核连续运行48h,无任何故障报警。运行中进行了负载投试验。试验结果如图5、图6所示。
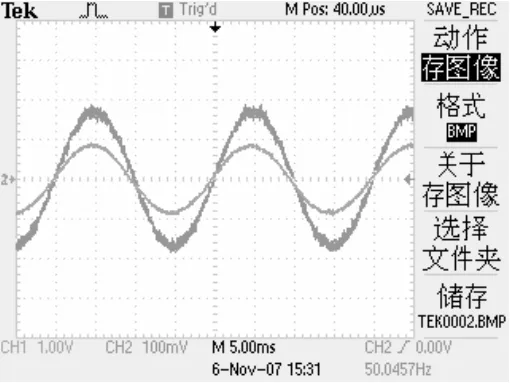
图5 A相电压及A相电流波形

图6 直流电压波形
图5为输出功率3kW时A相电压与相电流波形,其中幅值大的正弦波形为输入侧A相电流波形,幅值小的正弦波形为输入侧A相电压波形,可以看出二者相位基本一致,经检测功率因数为0.9954。图 6为负载投入前后直流电压波形,可以看出负载投入前后直流电压基本保持恒定,体现了系统较好的动态调整性能。
6 结论
本文提出了基于空间矢量的三相 PWM整流器的控制方法,为提高系统抗干扰性能,优化了系统主电路结构及控制系统软硬件设计,搭建了试验样机并进行试验。试验结果表明,采用基于SVPWM 的电压电流双闭环控制可以有效提高系统的功率因数(接近于1),输入电流失真度小,负载切换前后输出直流电压恒定,具有良好的动态调整性能。同时整流器带载考核连续运行48h,工作稳定,说明整个系统具有良好的抗干扰性。
[1]张崇巍,张兴.PWM 整流器及其控制[M]. 北京:机械工业出版社,2003.
[2]王晓明,王玲.电动机的DSP控制—TI公司的DSP应用[M].北京:北京航空航天大学出版社,2004.
猜你喜欢
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
数理化解题研究(2020年13期)2020-05-07
自动化学报(2019年12期)2020-01-19
数学物理学报(2019年5期)2019-11-29
电子制作(2019年23期)2019-02-23
电子制作(2017年19期)2017-02-02
通信电源技术(2016年4期)2016-04-04
