
AGV激光导引系统设计
2013-06-07 07:15:34李丽冯高峰
河南科技学院学报(自然科学版) 2013年4期
李丽,冯高峰
(济源职业技术学院,河南济源459000)
AGV激光导引系统设计
李丽,冯高峰
(济源职业技术学院,河南济源459000)
AGV作为当今物流领域的关键设备,必将取代传统的人工劳动.设计了AGV激光导系统,系统定位精确,能按工作计划进行作业,有效提高了生产使用效率.
AGV;激光导引;自动导引
AGV是一种高度智能化、自动化的机器人,发展至今,技术已日臻成熟.目前国内外的AGV导引技术有电磁感应导引、激光导引、视觉导引、惯性导引、超声波导引和磁钉—陀螺导引等.电磁导引是最早应用于AGV的导引技术,是现在大多数AGV仍然沿用的非常成熟的技术.激光导引是近些年兴起的技术,随着激光技术的发展,这种导引技术也越来越凸显其在导引控制方面的优势.可以预见,未来几年,激光导引技术必将成为AGV导引控制技术的主流技术[1-2].
本文设计的激光导引系统,在行进的过程中不会发生小车脱离正确预设路线的工况,能够在一定程度上规避AGV小车自身发生故障的几率,使AGV能够更好的服务于生产.
1 激光导引技术
激光导引技术是AGV发展至今最重要的一项技术,它主要包括两部分:AGV激光扫描器和AGV反射板.如图1所示,在AGV的顶部装有一个按固定频率旋转的激光扫描器.在导引区域的四周,按要求固定安装了反射板,当AGV运行时,激光扫描器在连续旋转的同时,不断地向四周发射激光束,并接受由反射板反射回来的光束.根据反射光束的方位可测得光束夹角θ1、θ2,再由PLC经过几何运算就能确定AGV当前的位置,而其他夹角,如θ3等,则用于验证AGV的位置及航向.在AGV运行过程中,激光扫描器连续扫描,PLC连续运算,就能实现连续的AGV导引.
AGV运行是电驱动电动机和转向电动机共同完成的,在驱动电动机和转向电动机上都装备了旋转编码器,作为运行速度及转向角度的反馈信号.在PLC收到上位控制命令后(包括要去的目标点及操作任务),能够选择最近的路径,并经伺服放大器发出控制信号,电动机接信号后驱动AGV向目标点运行.在运行过程中,PLC不断将理论位置与实际位置进行比较并将此转换成小车的速度和转向命令值,随时修正AGV在运行过程中的偏差[3-4].
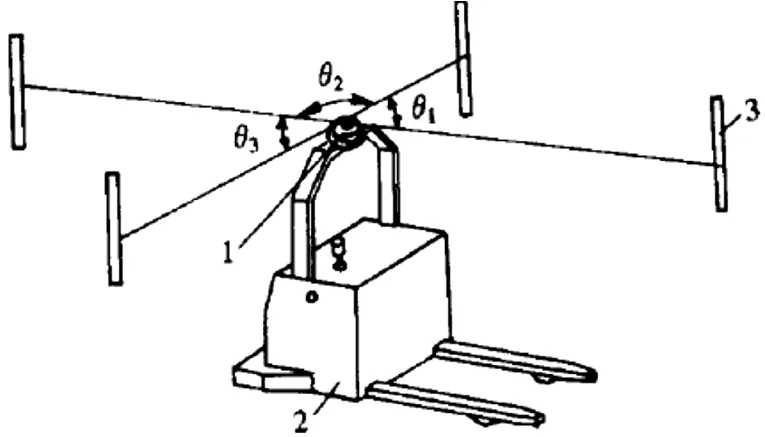
图1 AGV激光扫描器安装位置
2 激光导引系统设计
2.1 硬件组成
激光导引系统利用激光器、扫描旋转装置、光电信号采集装置、车载计算机和已知位置上的发射板,经车体方位计算及系统实时测量和计算小车的位置和方向.这套系统利用光学原理及几何运算,能够较精确地对AGV进行定位.小车激光导引系统的结构如图2所示.
计数器箱由二进制计数器和先进先出(FIFO)存储器组成.在每1转中,计数器由参考信号复位并根据旋转编码器提供的角度信号计算角度.当光电探测器检测到反射信号时,计数器产生1个中断信号,FIFO存储器保存角度信号并且不会干扰计数器的工作.
计算机单元由CPU、存储器、I/0接口、无线通信系统、输入设备和其他辅助设备组成.初始化数据通过输入设备存入存储器,每当完成1次360°扫描后,硬件产生1个中断信号,CPU发1个“读”信号从计数器箱存储器中获得角度数据.当获得3个或以上角度数据时,CPU就可计算出小车的位置和方向,然后将计算结果与目标坐标进行比较,或者根据需要,通过无线电通信方式传给地面控制系统.地面控制系统也可通过同一通信线路对车体方位计算子系统进行操作,如初始化、重置车体方位以消除累积误差等.
2.2 自动导引的控制实现
AGV方向控制是接受引导系统的方向信息通过转向装置来实现的.转向装置的结构通常设计成两种形式:铰轴转向式和差速转向式.前者的方向轮装在转向铰轴上,转向电机通过减速器和机械连杆机构控制铰轴从而控制方向轮的取向;后者在左、右两轮上分别装上独立的驱动电机,通过控制左、右轮的速度比来实现车体的转向[5].如图3所示,在L、R两轮上分别装上独立的驱动电机,C、D两轮在旋转和取向上都是自由的,它的稳定性较好,承载能力较大.vL、vR分别表示两驱动轮的速度,图示时刻小车中心线与目标路径偏差为e,小车前进方向与目标路径之间的夹角为θ,运动控制系统只要通过控制电机,使L、R两轮产生一定的速度比,就可以差速转向实现路径跟踪.
通过对驱动车轮的电机转动角度的周期性采样可以获得车轮前进或后退的距离.增量式光码盘连接在左、右驱动电机轴上,随着电机的转动,光电编码器发出A、B两项脉冲,相位的超前或滞后关系代表了电机的正转或反转.鉴相电路与脉冲计算电路相结合,可判断出左、右电机正转和反转的角位移变化情况.在理想情况下,电机轴的角位移与AGV左右驱动轮行走的距离存在比例关系.将上述光码盘发出的脉冲进行滤波,鉴相与计数处理后所得信息由路径轨迹推算导向法(dead—reckoning)可实现对AGV行驶路径的估计.
激光导引AGV的位置计算是利用小车当前运行的速度、转向的角度、间隔时间等参数对下一位置进行估算,计算出的是相对于前一位置的新位置.根据估算的新位置关联反射镜,根据关联的反射镜修正自身位置,车载控制计算机将当前方位与目标点方位进行比较,据此比较的结果给左、右电机发送驱动控制信号,从而实现激光导引AGV的自动引导.
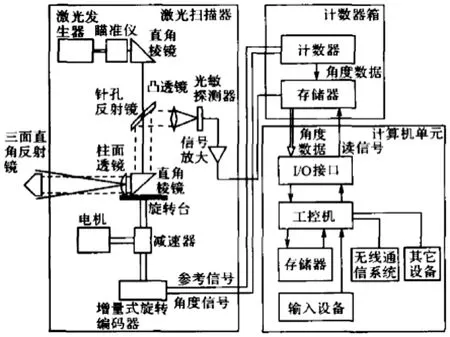
图2 小车激光导引系统结构
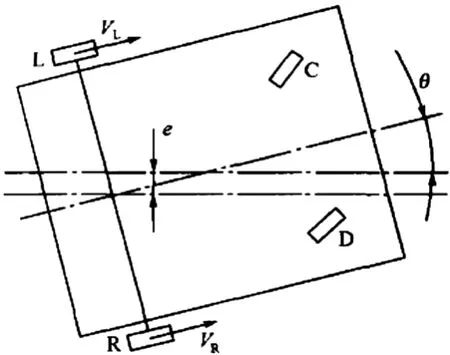
图3 差速转向装置
3 小结
AGV小车的导引技术有多种,激光导引的原理清晰简单,可靠性强,操作起来也比较容易,非常适合各个领域的应用需求,未来将成为AGV导引的主流技术.
[1]黄霞.嵌入式自动导引小车(AGV)系统研究与设计[D].南京:南京理工大学,2009.
[2]沈颖.激光导引AGV车载控制系统研究[D].合肥:合肥工业大学,2007.
[3]冯峰.AGV自动导引小车控制系统研究[D].镇江:江苏科技大学,2008.
[4]卢冬华.计算机控制自动导向小车(AGV)的设计与实现[D].上海:上海交通大学,2006.
[5]樊跃进,王勇,丁兴.AGV自动充电系统设计[J].机械工业自动化,1999,21(2):25-26.
(责任编辑:卢奇)
TN249
B
1008-7516(2013)04-0077-02
10.3969/j.issn.1008-7516.2013.04.018
2013-05-29
李丽(1981-),女,河南济源人,硕士,助教.主要从事计算机控制与嵌入式系统研究.
猜你喜欢
煤气与热力(2022年2期)2022-03-09 06:29:30
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:20
自动化博览(2014年7期)2014-02-28 22:32:25
河南科技(2014年10期)2014-02-27 14:09:30
电子设计工程(2014年18期)2014-02-27 12:00:24
发明与创新·中学生(2014年1期)2014-01-24 09:26:38
