
Car Ingress and Egress Motion Simulation Using Ramsis Software
2013-06-02 06:17CHENGXiaobiaoYANGZhigangZHOUZhenfuLIAODepan
机床与液压 2013年18期
CHENG Xiaobiao,YANG Zhigang,ZHOU Zhenfu,LIAO Depan
Changan Ford Automobile Ltd.,Product Development Department,Technology Development Center,Chongqing 401122,China
1.Summary
1.1.Manikin
Manikin is a tool to describe human body characteristics based on human physical dimensions.As the modern automobile design increasingly emphasizes“people-oriented”trend,manikin and its derivatives like eyellipes,head position contours,hand control reach envelope,are the main tools to validate package rationality,riding comfort,operating and controlling and positions of accelerate pedal,steering wheel and seat in design phase.It also serves as main tools to validate package roominess rationality of head clearance,knee clearance,shoulder room and elbow room.The common manikins in vehicle design are 5%female(short stature),50%male(middle stature)and 95%male(tall stature).The dynamic analysis of vehicle ingress and egress in this thesis is based on 95%standard size manikin according to the SAE J833 1989 requirements.
1.2.Ramsis Introduction
AS a CAD software co-developed by Human Solutions Company and Munich Industrial University Ramsis is mainly used to occupants simulating and ergonomicsanalysis calculation. Itautomatically computes and simulates driver’s gestures according to different assignments and optimizes the gestures by human-machine comfort and rationality.
This thesis describes a process creation of vehicle ingress and egress dynamic simulating analysis method using Ramsis.
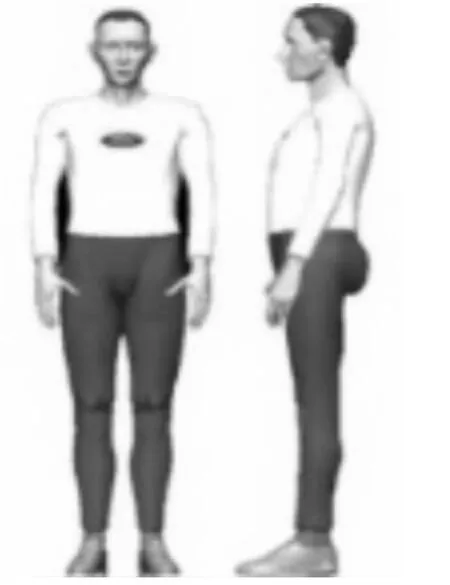
Fig.1 SAE 3D Manikin
2.Preparation for driver ingress and egress analysis
2.1.Prepare the neighboring data and analysis definition
2.1.1.Collect the neighboring data and lightweight
AS shown in Chart 2,collect body system relevant data.Ramsis having limited capability for 3D data,it is very necessary to lighten the listed data in Tab.2 to help Ramsis computing speed.

Tab.1 SAE 95%Male Manikin Basic Size(mm)
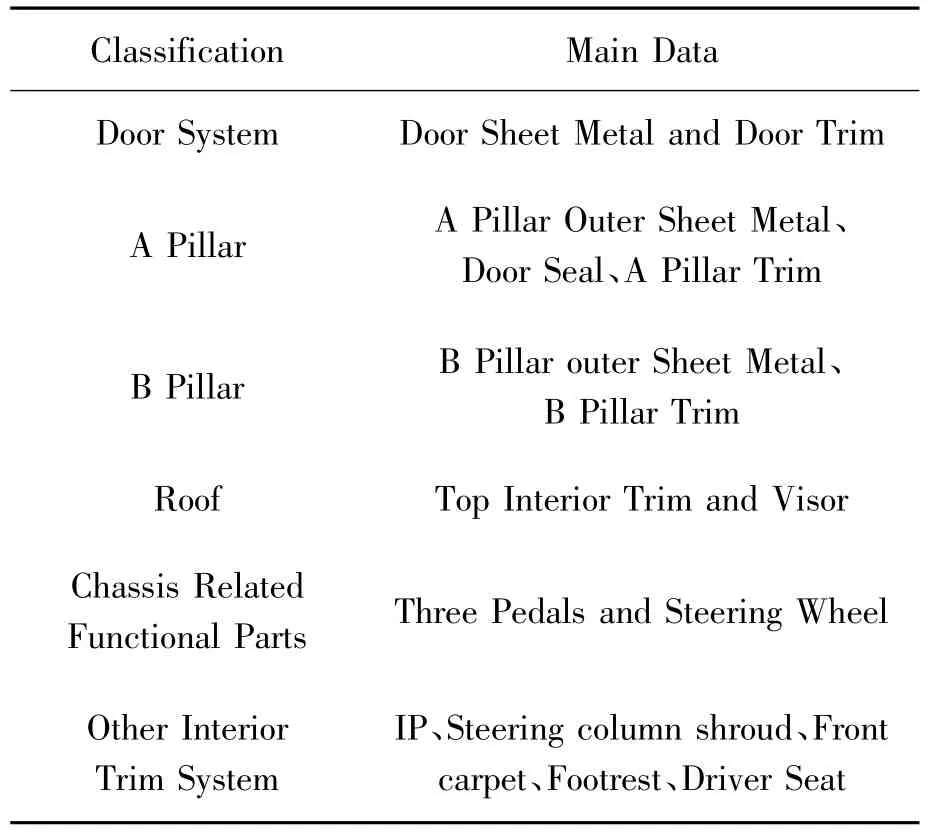
Tab.2 The basic data list for analysis
2.1.2.Define the gap between data and manikin during the simulation
In reality none part of driver’s body is allowed to interfere with vehicle parts in the process of ingress and egress.It is necessary to definite the gap requirements between manikin and the relevant data as basis for the following analysis.

Fig.2 Optimized data

Tab.3 The gap requirements between data and manikin in the process of simulation
2.2.Confirm the ingress and egress approach
The method of Ingress and Egress is mainly affected by the following two aspects:
Subjective:As driver`s age,gender,height,size,physical condition and other factors different ways used by different drivers.
Objective:Different types of vehicles will lead to different choice on the method of Ingress and E-gress,such as Passenger Car and Commercial vehicle
Excluding the complexity and uncertainty of sub-jective factors there are two types for discussion here by objective factors eg.head or hip priority entering type,see Figure 3 and Figure 4 for details.For small passenger cars the Value of H30(vertically dimension from the SgRP-front to the Accelerator Heel Point,SgRP means“Seating Reference Point”)is basically less than 405mm,driver’s SgRP is relatively low from the ground so he/she needs to lower his/her gravity center before entering into the cab for easy access to the operating position.This thesis focuses on“hip priority entering type”of small passenger car to introduce a simulation method of ingress and egress dynamic process based on Ramsis software.

Fig.3 Head priority entering type

Fig.4 Hip priority entering type
3.Create the simulation analysis model of ingress and egress
3.1.The general idea of ingress and egress process simulation
The general idea of ingress and egress process simulation is to divide the whole driver’s dynamic ingress process into a series of static position postures and define the dynamic frame value between each two adjacent postures.Ramsis can automatically connect all the defined postures and complete the dynamic simulation of the analysis model.
As shown in Fig.5,all the simulations are done with“Motion Recorder”command in“Animate”drop-down menu of Ramsis software;every posture is named one“Posture”.The definition method of each posture is that all manikin key points in Figure6 are correspondingly constrained with all the transition points of every transition posture to further complete the movement setup of dynamic simulation.

Fig.5 Ramsis Dynamic Simulation Dialog Box
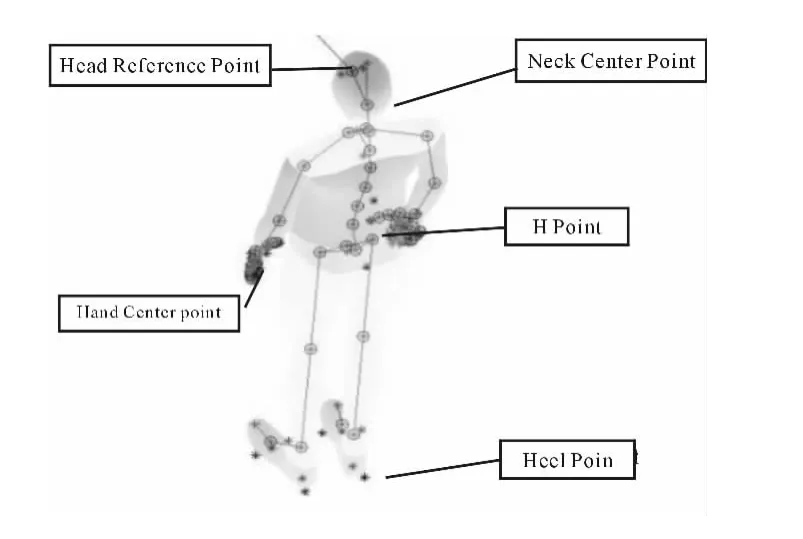
Fig.6 All Key Points of Manikin to be defined
3.2.Setup manikin main static positions(postures)
With car ingress for example,as shown in Figure7,the ingress process is divided into three static key-phase positions—original position before getting in the cab(Standing on the ground,ready to get in the cab),preparing position to enter into cab position when driver is sideways bending(the driver’s hip is in the cab but the head isn’t)and the normal driving position(the driver get all the things ready and can drive normally).
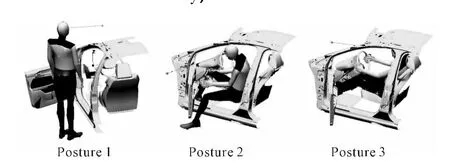
Fig.7 Three Main Postures in the Ingress Process
Posture1 Definition :Create 95%Manikin in Ramsis,as shown in Figure7-Posture1,Using the“Move”command in the Manikin menu to adjust the Manikin to the original position(Posture1).All the hard point of the manikin can be displayed by execu-ting the“”command(Wire frame Manikin Representation)on the left of Ramsis’s interface.After the Manikin is in the right position open the“Motion Recorder”dialog box under the“Animate”menu,as shown in Fig.8 and click"Append"to save the Posture1.
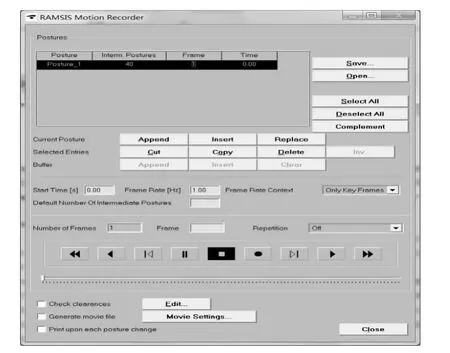
Fig.8 Motion recorder dialog box
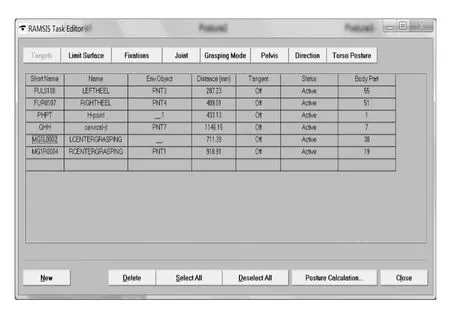
Fig.9 Ramsis task editor dialogeox
Posture 2 Definition:Using the“Create point”command in the“Geometry”drop-down menu,create all the assumed hard point position as shown Posture2 in Figure 7,there into the left heel point locates on the sill’s left-down position on the ground,the right foot heel point locates on the cab frontal floor,the head reference point locates on the left-up side of the door frame,manikin’s H point locates at the top of cushion and on the left-front side of whole vehicle R point.After all the hard points are created,open the“Define Task”command in the“Animate”drop-down menu,in the“Task Editor”dialog box as shown in Figure 9,click“New”button to add a new restriction,and correspondingly constrain between the manikin hard points and all the assumed hard points.After this,click the“Posture calculation”below the dialog box,compute all the constrains,and then a manikin transition posture appears.Check the interference situation between the transition posture and its surrounding parts,if the interference exists,further adjust and optimize the above-mentioned hard points position using the“Translate”command in the“Geometry”drop-down menu,repeatedly the above operations,until the gap between manikin and peripheral parts meet the requirements in Table 3,thus Posture 2 is completed to define.
Posture 3 definition:Using the“Targets”command in the“Task Editor”dialog box,correspondingly constrain the following combination,the manikin’s H point and the vehicle R point,the right foot treading point and the accelerate surface,the left heel point and the footrest panel,left hand center point and the outer surface left-middle position of the steering wheel,and the right hand center point and the outer surface right-middle position of the steering wheel.Then operate the manikin driving gesture using the“Calculation”command,thus Posture 3 is completed to define.
After the three positions(Posture1,Posture2,and Posture3)are confirmed,as shown in Figure 10,modify the frames value(Interm.Postures)between the two postures until the simulation can be carried out smoothly.After this,click“Save”to save it.Thus the ingress dynamic simulation is produced preliminarily.And then playback and preview the simulation using the control tools below Figure 8.

Fig.10 Simulation Playback
3.3.Adding the transition point and optimize ingress process
Interference may appear between manikin and the up body in above-mentioned simulation process,so it is very necessary to optimize the simulation process.
First,Adding the Transition Point,According to the Fig.11,at 3.2 automatically generated dynamic simulation,casing in the right foot heel position changes,the driver right foot heel point will move di-rectly from Posture1 to Posture2 according to red dotted arrows,as the moving of point to point is too direct,the right foot will interference with front sill,in this case,the transition heel point position is very essential,it can further optimize the movement contrail in the whole process.

Fig.11 Add Heel Movement Transition Point
Second,Creating the Manikin’s Transition Postures,When all transition points created,use“Define Task”command in“Animate”menu,correspondingly constrain the transition points and the hard points of manikin’s head,hands,feet and waist and so on,and compute the required transition postures.After this,check every transition attitude in gap aspect with its peripheral parts,furthermore,adaptably adjust and optimize the created transition points position in above process,and then do manikin gestures operations.Repeat the above steps,until the gap between manikin and peripheral parts meet the requirements in Tab.3,select the Posture2 use mouse pointer in the list of Posture as shown in Fig.10,and click the following“Insert”command,Posture 1.1 will be inserted between Posture 1 and Posture 2.

Fig.12 Adding Transition Posture
According to the above method,Posture 1.1 is created;modify the correspondingly dynamic frames value(Interm.Postures),until the simulation can be carried out smoothly,click“Save”to save it.And then playback and preview the simulation using the control tools below Figure 10,check the interference situation between manikin and peripheral parts during the dynamic simulating again,if the gap can’t meet the requirements in Table 3,repeatedly optimization steps are needed.It is feasible to further adjust and optimize the transition points’position and transition gestures,or subdivide both the adjacent postures further.As shown in Figure 13,with the depth of subdivision work,the difference between the two adjacent postures is much smaller,and the dynamic simulation is much smoother,the simulation result is also more close to the real state of driver ingress.

Fig.13 the depth of subdivision work between Posture1and Posture 2
3.4.Generate Manikin Hard point Moving Trail
After all the transition postures added,a smooth dynamics simulation result of car ingress is created.In the simulation process,each of Manikin hard points can sweep a spline curve.This curve is the Manikin hard point’s moving path in car ingress.As shown in Figure 14,click on playback button(a button like “”)in the control toolbars,a smooth dynamic egress simulation process is generated.
Thus the dynamic simulation process about the ingress and egress has completed based on the Ramsis software using the SAE 95%male Manikin.

Fig.14 Manikin Hard point Trajectory Figure in the Process of Car Ingress
4.Conclusions
Based on the Ramsis software,using SAE 95%male Manikin,from ingress way,gap requirements of ingress process between Manikin and surrounding parts,simulation models creation,transition postures optimization,Manikin hard points trajectory generation and other aspects,this thesis introduces a detailed method of driver ingress and egress dynamic simulation and provides a reference for the ergonomics dynamic study analysis of ingress and egress.
[1]ZHAO Shangyi.The Application of Ramsis Software in Ergonomics Design[J].Equipment Manufacturing Technology,2008(7):64-66.
[2]ZHU Weiyu,CHEN Changming,SHEN Hao.The Application of Ramsis of Automotive Ergonomics[J].CHINA SCIENCE AND TECHNOLOGY:information,2007(8):59-60.
[3]ZHAN Jianyun,ZHENG Jinjun.Study on Auto Body Packing Tools[J].Tianjing Auto,2002(2):25-28.
[4]Matthew P.Read and Stephanie Huang.Modeling Vehicle Ingress and Egress Using Human Motion Simulation Frame Work[J].SAE TECHNICAL PAPER SERIES,2008(1):1896.
[5]MAO Enrong,ZHANG Hong,SONG Zhenghe,et al.Ergonomics in Vehicle Engineering[M].Beijing:Beijing Institute of Technology Press,2007.
[6]Elodie Chateauroux,WANG Xuguang.A Database of Ingress/Egress Motions of Elderly People[J].SAE TECHNICAL PAPER SERIES,2007(1):2493.

- 机床与液压的其它文章
- Strength Analysis and Optimization of a Torsion Beam Rear Suspension
- Development of Vibration Signal Acquisition and Analysis System for Machine Tools Based on LabVIEW
- Numerical Analysis and Experimental Research on Micro Milling Process with Cycloidal Tool Path
- Analysis of the Optimization of Gear Pump Pulsation Based on Matlab
- Simulation Evaluation and Performance Analysis of a Double Coil Magnetorheological Valve
- Remote Condition-based Maintenance Approach to Hydraulic System of Construction Machinery