
Characteristics Simulation of the Open-circuit Axial Plunger Pump Based on AMEsim
2013-06-02 06:17GAOShuxiangCHENXiaohuDINGYao
机床与液压 2013年18期
GAO Shuxiang,CHEN Xiaohu,DING Yao
Second Artillery Engineering University,Xi’an 710025,Cnina
1.Introduction
With industrial development,the types of pump are endless.So far,in all types of positive displacement pumps,piston pump is the most ideal structure to achieve high pressure and speed.The open-circuit plunger pump theory is the first type of plunger pumps to achieve a self-cooling,self-lubricating,without the return lines,realized the series connection of piston pump,which also create a new way to the development of ultra-high pressure high flow pump,to reduce the temperature of the pump,to improve pump lubrication conditions and the life of the pump.
LMS Imagine.Lab AMESim offers a complete 1D simulation suite to model and analyze multi-domain,intelligent systems and to predict their multidisciplinary performance.The components of the model are described by analytical models representing the hydraulic,pneumatic,electric or mechanical behavior of the system.To create the system simulation model in AMEsim,the user can make use of a large set of validated libraries of pre-defined components from different physical domains.The software creates a physics based model of the system,which doesn’t require a full 3D geometry representation.This approach gives AMEsim the capability to simulate the behavior of intelligent systems long before detailed CAD geometry becomes available.
LMS Imagine.Lab offers an extensive set of application specific solutions which comprise a dedicated set of application libraries and focus on delivering simulation capabilities to assess the behavior of specific subsystems.The current portfolio includes solutions for internal combustion engines,transmissions,thermal management systems,vehicle systems dynamics,fluid systems,aircraft ground loads,flight controls,and electrical systems.The solutions combine strong simulation capabilities,effective interfaces with leading CAE solutions and advanced tools to study the static/dynamic functional behavior of any component or system in a graphical,user-friendly environment.
2.The establishment of mathematical model
2.1.Open circuit piston pump structure and working principle
Fig.1 is the open-circuit piston pump structure diagram.The plunger cylinder with port valve 1 and plunger 4 is distributed in the axial distribution in the pump body 2.There is a through hole in the center of the plunger from where low-pressure oil into the control chamber.A return spring is built in each plunger.Sliding shoes are built in the head parts of the plungers.The pump body is fixed with the port plate 6,side of which is with suction oil groove and the other side is not.
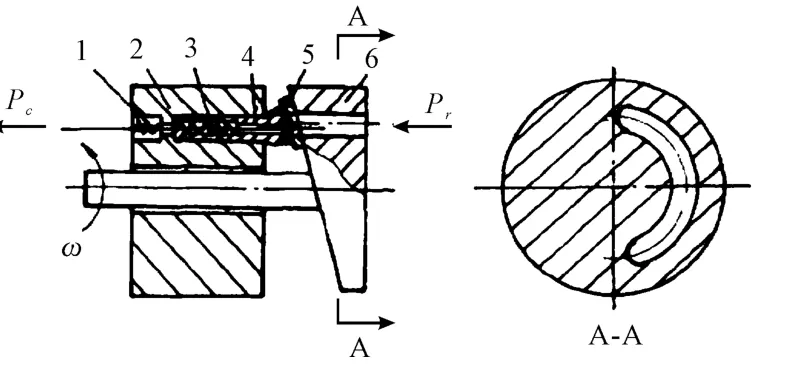
Fig.1 open-circuit piston pump structure diagram
When port plate rotates driven by driving shaft,piston cylinder does a reciprocating linear motion.Just at the opening when the plunger extends outwardly with the suction window of this side of the port plate,the low-pressure oil with flow from the port plate on the window through the shoe into the plunger cavity.When the plunger is compressed inwardly,as there are no coordinate suction oil groove,the bottom of the port plate is blocked forming a sealed chamber.With the rotation of the shaft,the volume of the sealed chamber decreases gradually with an increasing pressure.When the pressure reaches the opening pressure,the port valve is opened,thus the high-pressure oil output.As the shaft keeps rotating,a steady stream of high-pressure oil keeps outputting.
2.2.The establishment of mathematical model
1)Motion analysis of the plunger
Fig.2 is the kinematic diagram of the open-circuit axial plunger pump.Let the angle between the inclined port plate and the cross section of the pump body be β,the illustrated position which is the upper dead point of the plunger movement be a reference starting point of the movement,the radius of the circle which the plunger distributed beR.
①Displacement of the plunger
The extended length of the plunger when at the upper dead point is:

Let the extended length bex1when the plunger rotates an angle of φ,the following equation can be got:
Thenx1can be computed by:

The displacement of the plunger is:

When the plunger is at the lower dead point,φ =180°,the displacement of the plunger reaches the maximum and it is:

Also Δxmaxis the stroke of the plunger.
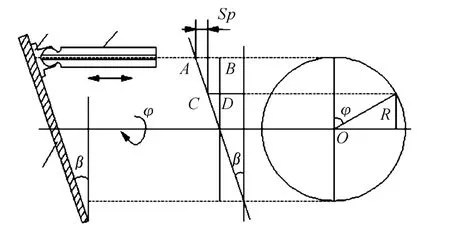
Fig.2 The kinematic diagram of the opencircuit axial plunger pump
②Speed of the plunger
Let the angular velocity of the pump body be ω.Make a differentiation of Δxwith respect tot,the speed of the plunger with respect to the pump body can be computed by:

The average speed of the plunger is:
③Acceleration of the plunger
Make a differentiation ofvwith respect tot,the acceleration of the plunger with respect to the pump body can be computed by:

When φ =0 or π,the speed reaches the maximum:

The relationship among the displacement,velocity,acceleration and angular φ is shown in Fig.3 and it is a regular pattern of Simple harmonic motion.
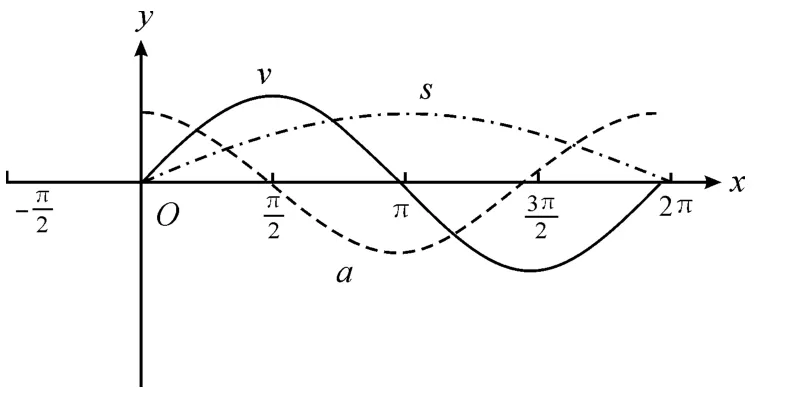
Fig.3 Kinematic characteristics of the opencircuit axial plunger pumps
2)Flow analysis of the pump
①Average flow
When the shaft does a revolution,each cylinder completes a suction oil and output process.The volume change of a single cylinder is:

Where:A-cross-section area of the plungers;d-diameter of the plunger.
Let the number of pump plunger bez,then the theoretical displacement of the pump per revolution can be computed by:

The theoretical average flow can be computed by:

Conclusion can be made that the displacement of the pump is proportional to the tangent of the inclined angle of the port plate.The flow of the pump can be changed by changing the inclined angle of the port plate.
Practically,due to the existence of insufficient oil suction,leakage and other reasons,the actual flow the pump is lower than the theoretical.Let the volumetric efficiency of the pump be η,the actual flow of the pump is:

②Instantaneous flow
There are multiple plungers absorbing and discharging oil at the same time,so the instantaneous theoretical flow is the sum of the flow of all those plungers which are discharging oil:
Where:Qiis Instantaneous theoretical flow of the plunger of No.i,mis the number of the plunger that are discharging oil.
The instantaneous flow of the plunger is:

Where:Viis the axial speed of the plunger of No.i,φiis angular of the plunger.
Then,the following equation can be got:
Also:
Do some mathematical derivation;the following equation can be got:

3.Simulation model
Based on the above analysis about flow and kinematics characteristics of theopen-circuit axial plunger pump,simulation modeling for single plunger can be made using AMEsim super original.It is shown as Fig.4.
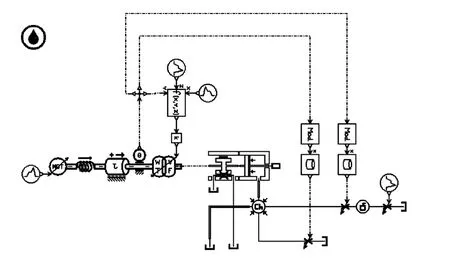
Fig.4 Simulation modeling for single plunger
4.The analysis of the simulation model
Respectively,the system pressure was set to be 50,100,150 and 200 bar,curves of the inclined angle of the port plate and the pump flow were drawn.As shown in Fig.5 and 5,the inclined angle of the port plate is increased when the pressure increased.When the inclination angle increases,the displacement of the plunger becomes larger.Then,the absorbing and discharging function of the plunger enhanced.Then,the flow of the plunger increases.Finally,the work efficiency of the pump increases.But greater pressure leads to more pulsation.The pulsation leads to the vibration of the port plate and noise which can lead to the failure of the piston pump.The pressure of the system must be appropriate to maintain the stability of the system while it is working.
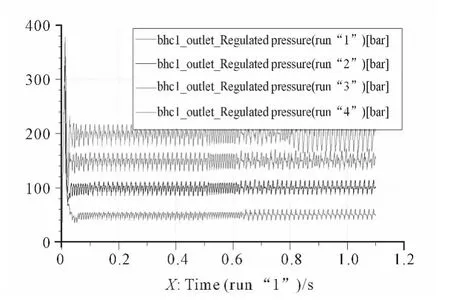
Fig.5 Pressure adjustment
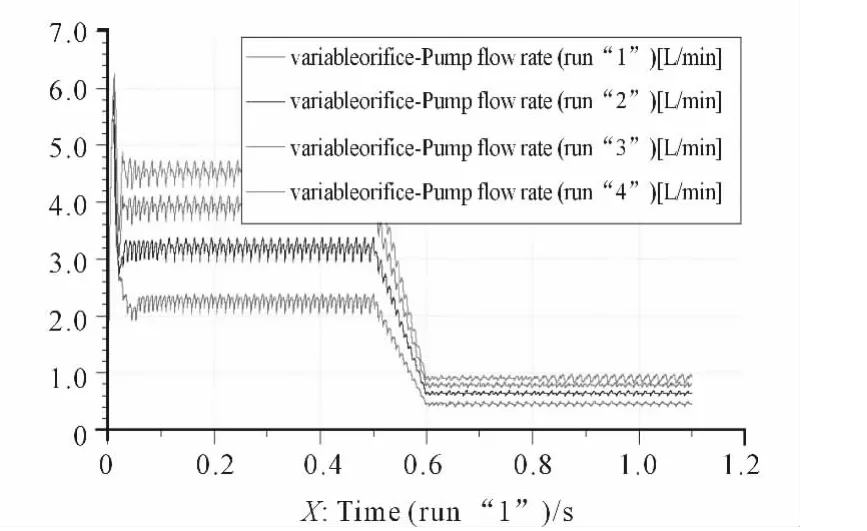
Fig.6 Flow of the pump
[1]NIE Songlin,SHI Xueyuan,HU Bin,et.al.Simulation on Status of Hydraulic Contamination and Optimum Collocation of Hydraulic Filters in Hydraulic System[C]//Proceeding of ISTP’2007.2007:1053-1056.
[2]XIAO Tibing,JIANG Xingping,LIUNG Ling,e alt.Modeling and Simulation of Hydraulic System of the Beam Part of the Tile Press Based on AMEsim[M].[S.l.]:IEEE,2011:593-596.
[3]FU Yongling,QI Xiao Ye.AMESim System Modeling and Simulation-From Novice to Professional[M].Beijing:Beijing Aerospace University Press,2006.
[4]FU Yongling,FAN Dianliang,QI Haitao.The Application of Co-Simulation Based on AMESim and Matlab in Electro-hydraulic Servo System[C]//2011 International Conference on Electronic&Mechanical Engineering and Information Technology.2011:3547-3550.
[5]ZHANG L X.The Load Simulator Using Blow Servo Valve with Interconnected Pores[C]//Proceedings of Third China-Russia-Ukraine Symposiumon Astronautical Science and Technology.Xi’an:[s.n.],1994:652-655.
[6]WANG W H ,HOU Z S,JIN S T.Model-Free Indirect Adaptive Decoupling Control for Nonlinear Discrete-Time MIMO Systems[C]//IEEE Conference on Decision and Control& Chinese Control Conference 09.Shanghai:[s.n.],2009:7663-7668.
[7]QI Haitao,FU Yongling.Simulation of Electro-hydrostatic Actuator Based on AMESim[J].Machine tool&hydraulics,2007,35(3):184-186.
[8]XING Keli,FENG Yu,JIN Xiajie,et al.Simulation of Electrohydraulic Servo System Based on AMESim/Matlab[J].Machine Tool& Hydraulics,2004,10:57-58.
[9]WAN Lixiang,DING Baohua,ZHOU Zhou,et al.Study onDynamical Simulation of Hydraulic Servo System Based on AMESim and Simulink [J].Coal Mine Machinery,2007,9:40-42.
[10]GU Hairong,WANG Yongqi,TAO Weiet al.Hydraulic system simulation of hydrostatic bulldozer based on AMESIM[J].Road Machinery& Construction Mechanization,2005(1):47-49.

- 机床与液压的其它文章
- Strength Analysis and Optimization of a Torsion Beam Rear Suspension
- Development of Vibration Signal Acquisition and Analysis System for Machine Tools Based on LabVIEW
- Numerical Analysis and Experimental Research on Micro Milling Process with Cycloidal Tool Path
- Analysis of the Optimization of Gear Pump Pulsation Based on Matlab
- Simulation Evaluation and Performance Analysis of a Double Coil Magnetorheological Valve
- Remote Condition-based Maintenance Approach to Hydraulic System of Construction Machinery