缆索起重机电气控制系统的改进方案
2013-06-01 12:39胡林海
机电工程技术 2013年12期
胡林海
(中国水利水电第四工程局有限公司第二分局,河北涿州 072750)
在我国大型水电工程施工的过程中,经常会使用缆索起重机来对大坝进行浇筑。不过使用传统的缆机控制系统控制起来非常麻烦,经常会出现故障,而且维修起来也非常麻烦。同时,在对机组进行调速时,需要占用大量的资源,且在起升绳弹跳时,很容易出现断裂的情况。本文通过对某缆索起重机的改进方法为例,对PLC和数字直流变流器配合使用的控制系统改进方案进行介绍。
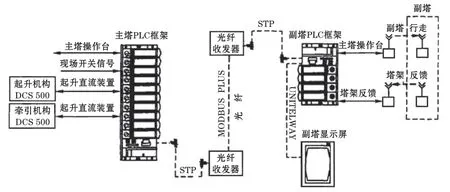
图1 控制系统简图
1 控制系统简介
某缆索起重机属于辐射式缆机。副塔主要是用来安装移动机构的移动端,主塔为布置牵引和起升机构的固定端。副塔上安装的司机室是固定的,可以进行牵引、起升、行走的操控。主塔可以对缆索起重机进行牵引和起升操作。具体控制系统如图1所示。
2 配置动力回路
2.1 配电设备的配置
因为缆索起重机的流动性比较高,所以此缆机的配电设备需要选用箱式变电站。配电箱主要由1台S9-M油浸式封闭变压器、两路低压馈电机构、一路低压受电机构和一路高压进线组成,起重低压受电和低压馈电结构主要是用来对设备牵引和起升时使用的直流调速装置线路进行保护,所有的低压出线线路都有一个抗电器和一个断路器[1]。使用这种配电方案,变电站中元件结构比较紧密,节省空间,且箱子不会受到灰尘和水的污染,方便搬运。
2.2 直流调速装置和传动方案的安装
使用直流双闭环拖动的方法来进行起重机的牵引和起升,测速反馈装置使用测速发电机。牵引机构主要由两台电机、一套整流装置、规定电机的额定电压为220 V,为了确保电机可以同时运行,分别使用励磁并联、电枢串联的方案对两台电机进行连接。起升结构主要由两部制动器、一套整流装置、一台电机组成,使用的电机电压为450 V,在额定负载工况下,空钩速度为210 m/min,下降的速度为165 m/min,上升的速度为125 m/min。使用全数字直流调速装置安装到可控硅流设备上,通过微处理器对调速装置进行调节和掌控。相关参数的调整和设置可以通过含有数字显示参数设定的元件全部设置完成,而不需要再用到其他的设备,非常的方便。两个反并联三相全控桥组成的可逆系统又叫电枢,产生的弱磁范围非常大。为了使得参数设定在一个最好的范围值,可以使用经验优化对速度环进行调节,磁场曲线和电流环使用装置进行自动调节。而且装置上还安装了具有保护作用的诊断报警功能。如图2所示。
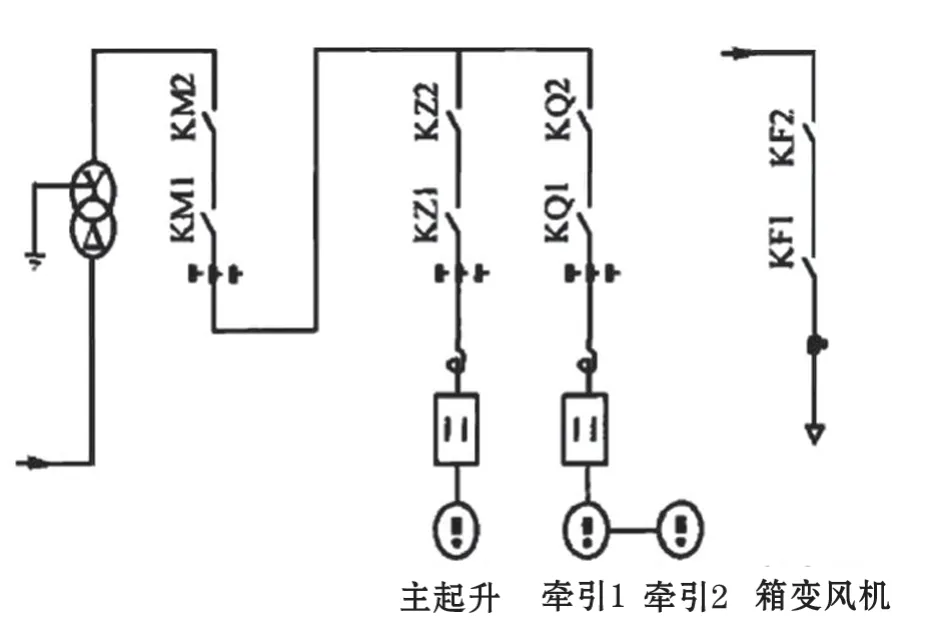
图2 动力回路配置简图
3 配置PLC和安装软件
3.1 PLC的安装
此缆索起重机使用德国生产的PLC系统,分别安装在主塔和副塔上,其中副塔上的PLC系统安装在副塔司机室中,主塔上的PLC安装在电气房中,主塔和副塔PLC都使用继电输出模块、24 V 供电模块、220 V 开关量输入模块,来确保PLC系统的安全稳定。主副塔之间使用光纤来进行数据的传输。主塔上的PLC系统为整个PLC控制系统的核心,主要对机构的停止和启动、投入或者退出负载电源、机械问题的报警等进行控制,副塔上安装的PLC系统的主要作用是和主塔PLC系统进行数据的交换以及对相关数据进行处理。
3.2 触摸屏
触摸屏和副塔PLC之间的信息交换是通过使用Unitelway协议来进行交换的。牵引子画面、主画面、起升子画面、设置画面是触摸屏的主要的四个部分。其中牵引画面和起升子画面的主要作用是用来监测和查询牵引及起升设备的工作情况。主画面是对整个起重机的工作状态进行监控的,比如起升速度的快慢、起升的高度、牵引的位置等等。设置画面主要是用来对牵引和起升的软限位进行设置的,不过设置画面的操作需要拥有专门权限,才可以进行操作,以免出现操作失误的现象。
3.3 软件功能的设置
此缆索起重机电气控制系统的软件使用PL7-PRO进行编写的,主要的功能模块有直流调速装置初始化模块、配电模块、通讯处理模块、牵引和起升控制模块五个部分组成。
(1)调速装置初始化模块设置。在控制系统启动时,是有特定的顺序要求的,如果未按照特定顺序进行启动,就很容易导致控制系统出现报警的情况。调速装置初始化模块主要就是用来控制系统的启动顺序的,从而避免出现不按顺序操作的情况。
(2)紧急停止的处理设置。通常情况下,如果在系统运行过程中,突然把主电源断开,会产生非常大的冲击电流,然后会对直流调速装置整流桥造成损害。为了避免这种情况的发生,此缆索起重机控制系统使用了全数字直流调速装置,在发生突然断电事故时,可以先对数字直流调速装置进行紧急电气制动,然后对数字直流调速装置的全控整流桥进行隔离,最后才对主电源进行切断,这样就很好地避免了整流桥损坏的情况发生。
(3)档位控制和档位标志。通常来说主控制器信号的传播速度是高于档位信号的传播速度的,不过,在进行旁路牵引时,如果速度过快会导致塔头和小车产生撞击,所以在进行旁路牵引时,速度要尽量放低,可以在软件中设置在进行这一牵引操作时,主动把主控制器的高档屏蔽,即屏蔽2~5 档,只保留一档的速度。在设备抱闸时会对档位进行标记。当液压杆制动器在抱闸时,会出现制动延时的情况,很容易出现在低速工况下溜坡或者溜钩的情况,在低速运行时,档位标志首先进行抱闸,然后把全数字直流调速装置断开,在高速运行时,为了降低刹车瓦片的损耗程度,先使用全数字直流调速装置进行电气制动,在速度降低后,再进行抱闸[2]。
(4)速度给定换算。机器的起升额定下降速度、上升速度、空钩速度是存在差异的。在软件程序中设置了两个标么值,分别为总体标么值V1和档位速度表么值V2。假设额定上升速度的标么值为1,那么其余各档速度的标么值分别为0.1、0.35、0.45、0.65、1。空钩的标么值为1.71、下降总体标么值为1.35。那么就可以使用此公式进行速度换算n=V1×V2×n,在此公式中n 代表基准值,通过在软件中设置此公式进行换算,就会很容易对速度进行换算。
(5)通信处理。数据之间的交换可以使用寄存器进行交换,通常情况下,一台PLC最多可以和30台PLC建立信息传送,信息的接收和发送一般都在15个字左右[3]。
4 起重机的保护
对缆索起重机控制系统的保护也是非常重要的一个方面,此缆索起重机电气控制系统设置了完整的保护功能,具体为:(1)供配电的保护功能,控制系统中使用了瓦斯和温度对变压器进行保护,从而保证供配电在一个正常工作状态;(2)当线路出现过流或者过载现象,电源缺相时,可进行欠压保护,可很好地避免过载现象的发生,另外可以使用温度对箱变整体进行防护,对电源进行相序、急停等方面的保护;(3)机构保护,为了对硬件限位进行保护,可以通过在触摸屏上设置软限位来进行保护,为了保证在工作的过程中,制动器一直保持在一个打开的状态,可以在制动器上安装松闸限位来进行保护。
5 结语
综上所述,通过在缆索起重机上安装PLC装置和全数字直流调速装置,使原来的缆索起重机电气控制系统发生了非常大的改变,起重机的性能得到了全面的提升,同时司机的工作量降低了很多。而且,使用上文中的信息传送方法,使得电缆的使用数量减少了很多,也减少了工作人员对电缆的维护次数和维护难度。此缆索起重机电气控制系统经过以上方法的改装后,完全达到了工地浇筑的规定要求,创造出了非常大的经济效益,是值得大力推行的。
[1]张元兵.起重机电控系统改造中应注意的问题[J].港口装卸,2006(5):27.
[2]北京ABB 电气传力系统有限公司.DCS500B 操作指导[Z].2004.
[3]北京施耐德电气有限公司.Magelis 操作员对话终端[Z].2005.
猜你喜欢
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
交通科学与工程(2021年3期)2021-11-04
上海公路(2019年3期)2019-11-25
水道港口(2019年5期)2019-11-19
石油工程建设(2019年2期)2019-05-11
中国特种设备安全(2018年10期)2018-12-18
石油化工建设(2018年2期)2018-07-11
船舶标准化工程师(2015年5期)2015-12-03
舰船科学技术(2015年8期)2015-02-27
筑路机械与施工机械化(2014年4期)2014-03-01