
输电线路除冰机器人跨越带倾角线路障碍物的方法研究
2013-05-10 11:05丁昌鹏朱大林艾福洲
制造业自动化 2013年10期
张 屹,丁昌鹏,朱大林,韩 俊,艾福洲
(1. 三峡大学 机械与材料学院,宜昌 443002;2. 宜昌供电公司,宜昌 443000)
0 引言
近年来,由于输电线路上的覆冰和积雪带来的巨大经济损失,国内高校和各科研院所开始大规模对输电线路除冰机器人进行研究。山东科技大学王吉岱团队主要对除冰机器人除冰方式进行了研究[1];湖南大学孙炜教授团队将研究重点放在了机器人传感器和机器视觉以及控制上[2];武汉大学动力与机械学院吴功平教授团队对移动机器人机构、自主移动导航、电源及其管理系统和机器人本体的系统集成做了深入探讨[3];华南理工大学则通过模型分析和仿真对巡线机器人跨越引流跳线的功能进行了研究[4]。这些研究都取得了一定的成果,但是关于机器人越障功能的研究较少,且仅有的对机器人越障功能的研究主要集中在简化的直线线路条件下,没有考虑实际线路中存在的倾角问题,对大倾角线路的越障研究和实验不够完善,而实际线路中的倾角问题是不可避免的。基于此,文章重点分析机器人跨越带倾角线路障碍物的条件,总结线路倾角与结构参数之间的关系,设计出了一种能跨越带倾角线路障碍物的新机器人结构,并进行仿真及实验验证,丰富机器人越障领域的研究成果。
1 除冰机器人机械结构总体设计
除冰机器人是机电一体化系统,包括机器人机构、通信、控制、传感器和电源等,机械结构是整个系统的基础。除冰机器人在输电线路上除冰,基本前提是机器人能在线路上平稳行进,输电线路上有防震锤、线夹、绝缘子等障碍物,机器人除能沿导线行走之外,关键是遇到障碍物能安全平稳越过。本课题组设计的机器人由除冰机构、行走机构、手臂机构、错动箱及控制箱组成,其中行走机构采用前后两行走轮的双行走轮结构;手臂机构包括具有伸缩、旋转功能的前、后手臂和具有夹线夹的中间手臂,前、后臂分别位于导线左、右两侧,中间臂位于导线正下方。如图1所示。
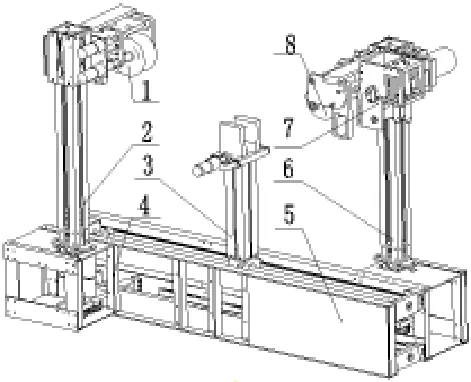
图1 除冰机器人结构图
为满足越障除冰需要,机器人上装有10套直流无刷电机的伺服系统,在前后两个手臂上装有控制行走轮滚动和夹线夹的夹紧松开的成对伺服系统,前臂上装有控制除冰机构工作的伺服系统,错动箱上装有控制中间手臂水平移动和左右错动箱错动的伺服系统,左、右错动箱里面分别安装有控制前、后手臂的升降及旋转的伺服系统,即一个伺服系统控制一个手臂的升降和旋转两个动作,中间臂上装有控制夹线夹夹紧松开的伺服系统。左右错动箱里还各装有一个电磁铁,对手臂进行定位,机器人本体上还装有接近开关、行程开关等传感器。
2 除冰机器人控制系统设计
本课题组设计的除冰机器人主要采用人机结合、局部智能的控制方式,主要包括远程控制系统、机器人本体控制系统和执行层,整个控制系统的组成结构如图2所示。
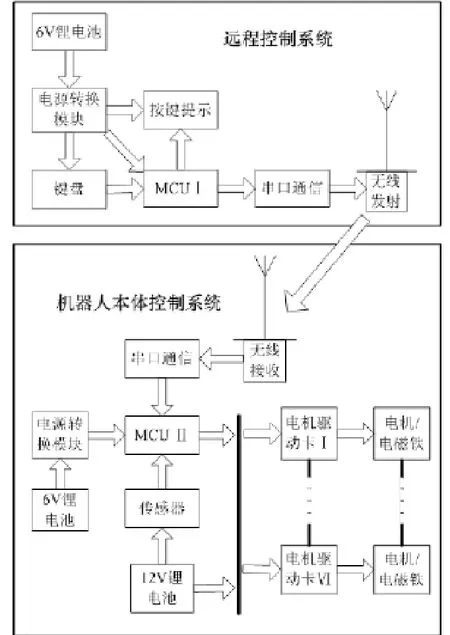
图2 除冰机器人电控系统
无线收发模块采用APC220模块,APC220模块是高度集成的半双工微功率无线数据传输模块,其嵌入高速单片机和高性能射频芯片,采用高效的循环交织纠检错编码,抗干扰和灵敏度都大大提高,最大可以纠正24 bits连续突发错误。系统选用AVR系列的Mega128作为主控芯片,该芯片内部含有丰富的硬件资源,能够十分方便地与无线收发模块APC220进行通信。电机驱动采用Freescale公司的MC3386,该驱动可以同时驱动两个电机。
在远程控制方式下,其接收远程控制系统下发的控制命令,将其解释为各个电机的运动序列,并依次发送给执行层进行执行; 在自主越障时,其根据知识库和传感器检测信息,自主进行机器人动作规划,生成电机动作。
3 越障方法研究
3.1 越障原理
除冰机器人在输电线路上除冰,基本前提是机器人能在线路上平稳行进,输电线路上有防震锤、线夹、绝缘子等障碍物,机器人除能沿导线行走之外,关键是遇到障碍物能平稳可靠地越过。图3为机器人前臂翻越带倾角线路上绝缘子示意图。
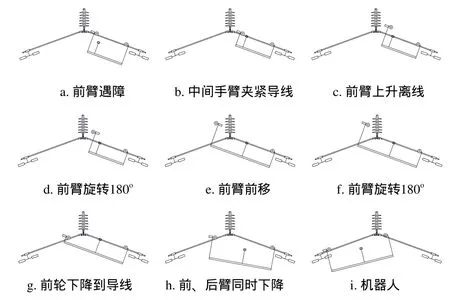
图3 除冰机器人前臂跨越绝缘子示意图
当机器人前臂遇到障碍物时,通过遇障传感器发出停止信号使机器人停止运动,机器人开始自动越障。前臂和后臂同时收缩,中间臂夹线夹上中装有前、后两个分别控制前臂和后臂的传感器,前传感器接近导线时,前臂停止收缩,后传感器接近导线时,后臂停止收缩,中间手臂夹线夹夹紧导线,后臂上的夹线夹夹紧导线;通过前臂升降旋转电机使前臂上升到最高,前臂电磁铁插销收进,前臂升降旋转电机降速并使前臂顺时针旋转180°,前臂电磁铁插销弹出,前臂位置固定;前臂向前移动,越过障碍物后,前臂电磁铁插销收进,前臂升降旋转电机降速并使前臂顺时针旋转180°,前臂电磁铁插销弹出,前臂位置固定;此时由于机器人自身重力作用,中间臂夹紧夹上的前传感器脱离导线,前臂下降到导线,直到中间臂夹线夹上的前传感器接近导线停止下降;中间臂夹线夹和后臂夹线夹松开导线,前臂和后臂同时伸长到最高点;机器人向前行走,直到后臂遇到障碍物,机器人停止运动。后臂采用与前臂相同的越障原理越过障碍物。
3.2 线路倾角与机器人主要机构尺寸关系
架空线路是由多跨导线与多座杆塔、基础以及附属连接件组成的连续、耦合的空间体系结构。在实际的输电线路中,线路走廊穿越的地理环境更加复杂,如经过大面积的水库、湖泊和崇山峻岭,输电杆塔间存在着较大间距,基础所处地势高低不一,而且输电线采用的是柔性相对较大的金属材料铝,两相邻杆塔间输电线呈现的是弧线形,而不是绷紧的直线形。靠近线夹两侧的短距离的输电线与水平面之间存在着一定的角度,这个角度即为实际输电线路中存在的倾角,此角度会因基础地势、杆塔间距、输电线型号及其它相关因素的不同而有差异,倾角会给机器人越障带来困难。在工程实际中,一般悬垂角为5°~12°;当线路通过山区高差较大时,悬垂角可达20°~ 25°,超过25°的悬垂角极少见[5]。
线路倾角及障碍物位置约束机器人本体机构尺寸,本课题组以导线倾角及障碍物位置为约束条件设计计算机器人机构尺寸。将线夹两侧短距离内的导线刚性处理,在分析机器人越障时不考虑导线变形影响。除冰机器人本体材料为铝合金LY12,在运行中机器人与线路结构简化成为一个刚性系统,在前臂越障过程中,由于中间臂夹线夹和后臂夹线夹均已经夹紧导线,两点固定使机器人纵向轴线与同侧导线平行。此处考虑线路倾角,分析计算机器人跨越绝缘子、线夹障碍物时线路倾角与机构尺寸的关系。
机器人跨越防震锤需满足的条件:
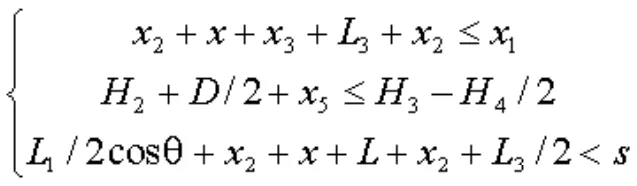
机器人跨越绝缘子需满足的条件:
式中:x为除冰机构前端超出前臂侧端距离;x1为错动箱相对错动最大距离;x2为越障时机器人两端(除冰机构前端,后行走轮后端)距障碍物的安全距离,取x2=30mm;x3为前臂侧端距前臂行走轮后端距离,x3=120mm;x4为手臂上下箱错动最大距离;x5为越防震锤时中间臂夹线夹中心距防震锤的安全距离,x5=30mm;L为机器人前后臂侧端相隔距离;L1为悬垂线夹长;L2为绝缘子盘径;L3为防震锤中心宽度;H1为导线中心到绝缘子底部的距离;H2为防震锤下部中心到导线中心距离;H3为前后臂伸至最长时,中间臂夹紧夹中心到导线中心的距离,H3=130mm;H4为中间臂夹线夹高度;d为前臂越过绝缘子时,前行走轮与绝缘子之间的安全距离,d=30mm;D为防震锤最大直径;D2为行走轮直径;S为防震锤中心到悬垂线夹中心距离;
为导线中心轴线方向与水平方向的夹角。
实际输电线路的倾角必然存在,在相对平缓的线路时,手臂伸长量x4小,此时行走箱错动距离主要取决于障碍物的结构尺寸;随着倾角增大,x4增量明显;以障碍物两边对称倾角分析,线路倾角理论上须小于25°,则机器人越障能力完全满足实际线路工况。
4 除冰机器人越障仿真与实验
本课题组在制造物理样机前,运用现代的虚拟设计方法以验证越障方案的可行性并评价机构尺寸。以上节的分析计算结果为依据,以机器人跨越110KV带倾角为20°输电线路为例,此时机器人前后臂间距L=750mm,错动箱相对错动最大距离x1=740mm,手臂上下箱错动最大距离x4=320mm。按越障原理规划的机器人越障动作,忽略本体的局部结构,在Pro/E环境下建立机器人的三维模型以及带倾角线路环境,进行仿真分析。其过程如图4所示。
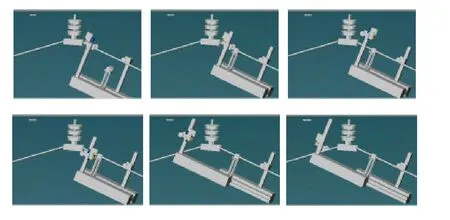
图4 机器人跨越带倾角线路障碍物仿真
图4列出了机器人前臂跨越单边20°倾角线路中绝缘子和线夹的运动过程。后臂越障具体步骤与前臂一致。仿真结果显示,优化的机器人结构和越障方案切实可行,机器人手臂携带除冰装置能顺利的完成带倾角线路的越障功能。
在实验室搭建带倾角的输电线路模拟环境进行样机实验,如图5所示。通过模拟线路的样机实验,机器人能很好的满足设计功能要求,能跨越带倾角线路绝缘子串和线夹,越障动作顺利可靠。

图5 除冰机器人样机实验室越障实验
5 结束语
通过分析输电线路实际工况,得出了机器人机构尺寸与实际线路倾角的关系,使得机器人结构设计分析更精确;设计出能跨越实际倾角线路障碍物、具有高机动性能的除冰机器人,结构简单、控制简便;通过仿真和实验验证了机器人结构正确性,能跨越带倾角线路障碍物,机器人适应性好,实用性强,实现了除冰机器人从实验分析到实际应用的转变。
[1] 王吉岱,王珊,雷云云,等.一种新型输电线路除冰机器人的本体结构设计[J].机械设计与制造,2011,5(5):62-64.
[2] 王聪,孙炜.高压输电线路除冰机器人抓线运动控制[J].机械工程学报,2011,47(9):8-15.
[3] 徐显金,李维峰,吴功平,等.沿架空地线行驶的自主巡检机器人及应用[J].武汉大学学报(工学版),2010,12(6).752-761.
[4] 余晓鑫,田联房,王孝洪,等.基于SolidWorks的巡线机器人机械本体设计及越障运动仿真[J].机械设计与制造,2010,8(8):180-182.
[5] 懂吉谔.电力金具手册.2版[M].北京:中国电力出版社,2001.
[6] 张屹,邵威,朱大林,等.架空输电线路除冰机器人的样机研制及动力学仿真[J].水电能源科学,2011,29(3):16 2-165.
猜你喜欢
黑龙江水利科技(2022年8期)2022-09-22
实用手外科杂志(2022年2期)2022-08-31
医疗装备(2022年9期)2022-05-26
计算技术与自动化(2022年1期)2022-04-15
铁道科学与工程学报(2021年9期)2021-10-20
宁夏电力(2021年1期)2021-03-19
黑龙江科技大学学报(2020年1期)2020-03-24
震灾防御技术(2019年3期)2019-06-02
电子制作(2018年17期)2018-09-28
组合机床与自动化加工技术(2017年8期)2017-09-08
