
直流5 kA电磁斥力驱动式高速触头操动机构动作可靠性的优化设计
2013-05-05 07:25武瑾庄劲武王晨江壮贤
船电技术 2013年10期
武瑾,庄劲武,王晨,江壮贤
直流5 kA电磁斥力驱动式高速触头操动机构动作可靠性的优化设计
武瑾,庄劲武,王晨,江壮贤
(海军工程大学电气工程学院,武汉 430033)
额定大电流的电磁斥力驱动式触头操动机构难以实现工程化,论文从减小电磁斥力、增强材料强度、提高机构工程可实现性等方面考虑,提出了增大驱动电容减小预充电压、斥力线圈放电回路中串联电感、优化斥力线圈结构参数以及采用电导率较小、相对磁导率较大的钢材作为斥力线圈支撑板等的优化方案。仿真和试验数据表明:在斥力线圈放电回路中串联电感,不仅保证了驱动电容的体积尽可能小,有利于工程应用,也极大地降低了脉冲斥力对机构的机械冲击,提高了机构的动作可靠性,有效地延长了其机械寿命。
大电流 电磁斥力 可靠性 优化 工程化
0 引言
在地铁、轻轨、船舶等直流电网中,随着系统容量的不断增大,一种将机械开关与固态开关相结合的混合型直流限流断路器孕育而生。机械开关承担稳态通流任务,系统发生短路故障时,机械开关分断的同时导通固态开关,电流从机械开关换流至固态开关,由固态开关分断短路电流[1-3]。固态开关无弧且动作迅速,为了快速抑制短路电流的上升,需要缩短机械开关的响应及刚分时间,提高动触头运动初期的分闸速度。因此,基于涡流感应原理的电磁斥力机构逐渐取代了传统的操动机构。这种新型高速触头操动机构与固态开关配合使用,可以有效地提高断路器分断短路电流的能力。
电磁斥力机构是利用放电脉冲电流通过盘状斥力线圈时,与附近金属斥力盘感应出的涡流产生脉冲斥力作用,进而推动动触头快速动作。一方面,随着系统额定电流的不断提高,电磁斥力峰值可以达到几十甚至几百kN,同时力的作用时间只有几百个µs[4-6];另一方面,断路器机械寿命必须满足几千次甚至高达几万次的国、军标要求[7]。因此断路器的分闸操作对机构机械冲击的累积势必降低其动作可靠性并增加其工程化应用的难度。本文将呈现出高达90 kN脉冲斥力的冲击对直流5000 A电磁斥力驱动式高速触头操动机构所造成的材料与结构的破坏。
文献[8]中,基于系统电压等级5000 V的电磁斥力驱动式高速操动机构,通过仿真得到其脉冲斥力峰值接近180 kN。文献[9]中,基于额定7000 A的电磁驱动式直流混合开关,脉冲斥力峰值高达100 kN。文献[10-11]中,尽管系统容量较小,但电磁斥力峰值仍可达几十kN。然而,大部分文献仅仅完成了电磁斥力驱动式触头操动机构的仿真或原理样机的验证性试验,鲜有涉及机构的工程化问题,包括机构动作稳定性测试及优化设计等。本文基于直流5000 A电磁斥力机构样机,结合具体的分断指标要求,提出增大驱动电容减小预充电压、在斥力线圈放电回路中串联电感以及优化机构材料和线圈结构参数等方法,力求优化大电流下电磁斥力驱动式高速触头操动机构的方案设计,提高动作可靠性,实现断路器的工程化应用。论文采用斥力线圈放电回路中串联电感的优化方案,完成了直流5000 A机构样机的2000次分、合闸操作,并从刚分时间、初始气隙、机构内阻及运动轨迹等方面,论证了方案的可行性以及机构动作的稳定性。
1 大脉冲斥力对机构的机械冲击
文中提到的直流5000 A混合型限流断路器高速触头操动机构是采用电磁斥力驱动的,原理样机的结构尺寸与电气参数如表1所示。
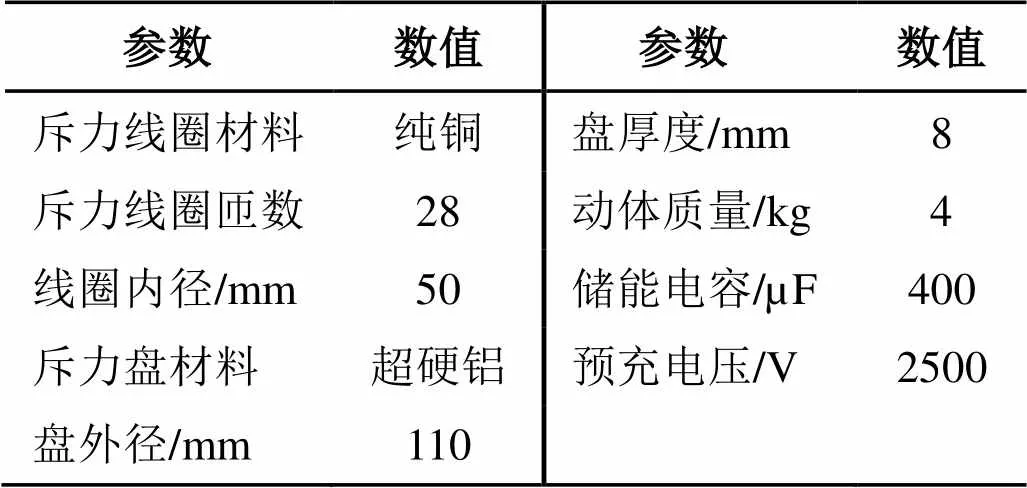
表1 原理样机结构及电气参数
1.1 直流5000 A机构样机的运动仿真
借助工程电磁场有限元仿真软件Ansoft,我们对直流5000 A的电磁斥力机构样机建立了二维仿真模型。图1是完成网格剖分后的轴对称模型,网格划分得越多,计算结果越精确,但同时计算量也随之增大。
根据断路器的分断特性,电磁斥力机构的运动指标主要由两个点确定,一是触头两端起压时刻的额定开距,一是触头两端产生过压时刻的额定开距。根据直流5000 A断路器的分断指标要求,样机的运动特性需满足:起压点1 ms时触头额定开距1.5 mm以及过压2 ms时额定开距4 mm。

图1 样机二维仿真模型
为了获得更短的刚分时间和更大的初始运动速度,图2采用小电容、大电压的驱动策略,在储能电容400 µF,预充电压2500 V的驱动能量下,电磁斥力峰值高达90 kN。

图2 样机仿真结果
1.2 直流5000 A机构样机的试验
在对机构样机进行几十次分闸操作之后,斥力线圈板与斥力盘间的气隙越来越小,由最初的1 mm减小到0.05 mm左右;触头的运动特性不稳定,尤其是刚分时间波动较大。拆卸样机后如图3所示:发现斥力线圈支撑环氧板严重开裂;表层的环氧薄板部分泛白起皮;位于支撑环氧板下方的支撑钢板出现塑性变形。斥力线圈放置于支撑环氧板内,当斥力盘受到电磁斥力带动动触头快速运动时,斥力线圈会受到相同的力并对支撑板造成冲击。为了保证机构运动的稳定性,斥力线圈支撑板必须具有很好的抗冲击能力。
为了分析上述现象产生的根源,借助于高速摄像记录下斥力线圈支撑板的形变过程。电磁斥力产生后,支撑板出现剧烈振荡,最大有0.8 mm的形变量,直至稳定,整个过程持续时间接近5 ms。支撑板选用的是普通环氧材料,屈服强度小。因此,高达90 kN电磁斥力的反复冲击以及环氧支撑板塑性变形的累积必然对机构材料的强度,甚至动作的可靠性形成巨大挑战。

图3 巨大冲击力对样机造成的破坏
2 机构参数的优化
由图2可以看出,90 kN电磁斥力下动触头的位移完全能够满足预期的指标要求,并留有一定裕度,因此为了提高机构的动作可靠性,可以适当减小电磁斥力峰值。
通常,在电磁斥力作用时间内,动触头会获得一个最大运动速度V;斥力消失后,由于负载力的作用,动触头会以V为初速度,作减速运动,直至机构成功锁扣。
驱动电容不变,降低预充电压,在保证运动特性曲线满足指标要求的情况下,的确可以减小电磁斥力。然而,仅仅减小电容的预充电压,降低电磁斥力峰值的同时缩短了力的作用时间,这会使V迅速减小,进而影响其后期的运动轨迹。因此为了使动触头运动到最大开距,成功锁扣,仅仅减小预充电压,只能实现电磁斥力的小幅度降低。
2.1 驱动电容的优化
小电容大电压的方案适合刚分时间尽量短、触头间尽早形成大开距的情况[12]。而直流5000 A断路器分断指标中的两个关键点对应着电磁斥力的作用时间基本结束,即它对刚分时间和初始速度的要求并不高,那么减小电磁斥力峰值,并适当延长力的作用时间仍然可以满足预期指标要求。在驱动能量相同的情况下,增大驱动电容减小预充电压是可以实现上述驱动策略的。
现将驱动电容分别增大到1 mF、5 mF,对应的预充电压减小到1580 V、707 V,那么相关数据的仿真对比结果如表2所示。
表2 相同驱动能量下增大驱动电容的仿真对比

其中,I、F分别为脉冲电流峰值、脉冲斥力峰值;V为动触头的最大速度;定义为机构效率,即最大动能与驱动能量的百分比;定义为驱动电容的能量密度,即单位体积内的能量,越大表明实际驱动电容的体积越小,更利于工程应用。表2中,驱动能量不变,随着电容的增大、预充电压的减小,电磁斥力的确可以迅速减小,同时机构效率也有所提高,然而电容的能量密度急剧减小,即电容体积增大了许多,这并不利于机构的工程化应用。
2.2 驱动电路的优化
驱动能量不变,同时确保驱动电容体积尽可能小,为了减小电磁斥力,在斥力线圈放电回路中串联电感也是一种优化途径。显然,增大回路电感,同时回路电阻也相应地增加,必然会降低放电脉冲电流,进而减小电磁斥力。
如图4所示,L为串联电感,为了延长力的作用时间,将其串入二极管续流回路;R为电感内阻。仿真中,驱动电容400 µF,预充电压2500 V,将串联电感分别调整为20 µH、40 µH,其仿真对比结果如表3所示。在驱动能量及驱动电容体积不变的情况下,随着串联电感的增大,电磁斥力迅速减小,同时机构效率也有一定的提高。

图4 斥力线圈电容放电回路
表3 串联电感后的仿真对比

1.1节提到的断路器指标中,动触头运动特性的时间轴是以刚分时刻作为零点的。刚分时间是指从斥力线圈放电回路晶闸管导通到动、静触头间弧压建立的时间,随着电容或串联电感的增大,机构刚分时间会随之增大。增大驱动电容或串联40 μH电感后,采用直线位移传感器,并搭建刚分时间测试回路对直流5000 A机构样机的运动特性进行记录,处理后得到如图5所示的对比波形,时间零点均为机构相应的刚分时刻,可以看出,对于直流5000 A机构样机来说,斥力线圈放电回路中串入40 μH电感这一优化方案,在运动特性满足预期指标要求的前提下,能够将脉冲斥力的峰值减小到30 kN,极大地减弱了力对机构的机械冲击。
2.3 斥力线圈结构参数的优化
斥力线圈放电回路中串联40 μH电感,虽然能够有效地减小电磁斥力,但是该电感并没有参与力的作用,这是对能量的浪费。若通过改变斥力线圈的结构尺寸,使得回路电阻、电感与串联40 μH电感的方案保持一致。为了得到相同的脉冲力,即相同的运动特性,可以减小驱动电容的能量,即进一步减小其体积。
仿真中,选择线径为1.6 mm的铜导线,绕制40匝,使得线圈内、外径基本不变,驱动电容1.5 mF,预充电压1150 V,能量由1250 J减小到990 J,其脉冲斥力与运动轨迹的仿真对比结果如图6所示。可见,在串联电感的方案基础上,适当改变斥力线圈的结构参数,不仅运动特性保持不变,而且驱动能量也减小了,进一步降低了机构的工程化应用难度。

图6 串联电感与改变线圈结构两种方案的仿真对比
2.4 斥力线圈支撑材料的优选
为了提高机构的动作可靠性,延长其机械寿命,一方面可以改变驱动策略,减小电磁斥力,进而降低力对机构的机械冲击;另一方面可以从机构的结构设计和材料的选择上进行优化。
正如1.2节提到的,为了保证机构动作的稳定与可靠,斥力线圈支撑板必须具有很好的抗冲击性。除了优化驱动参数,减小电磁斥力外,可以通过选择强度更高的材料以抵御力的反复冲击。
钢材作为替代对象,强度高,同时可导电,由图7可以看出,支撑材料的电导率和相对磁导率会对电磁斥力产生不同程度的影响。从能量角度解释,在斥力线圈放电回路驱动参数相同的情况下,若支撑板导电,它同样会感应出涡流,消耗一部分电能,那么斥力盘感应出的涡流会降低,从而减小脉冲斥力,同时电导率越大,脉冲斥力越小。同样用能量的观点阐述,支撑板选择导磁材料可为斥力线圈产生的磁场提供了更好的导磁回路,从而减少能量在空气中的损耗,同时相对磁导率越大,脉冲斥力越大。因此,应该选择电导率较小且相对磁导率较大的钢板作为斥力线圈的支撑材料。

图7 不同支撑材料下电磁斥力的仿真对比
3 机械寿命试验与结果
对机构参数进行优化,一方面增强了材料的强度,另一方面降低了电磁斥力对机构的机械冲击。论文采用在斥力线圈放电回路中串入40 μH电感的优化方案,对直流5000 A的原理样机进行了2000次分、合闸操作,以验证其动作可靠性。

表4 初始气隙与灭弧室内阻试验数据
表4列举了操作过程中,合闸状态下斥力线圈与斥力盘间的初始气隙以及灭弧室内阻的变化情况。初始气隙的变化会直接影响线圈与斥力盘间的互感,从而影响脉冲电流、脉冲斥力,最终影响机构的运动特性;灭弧室内阻过大会影响断路器额定通流情况下的温升。表4中,初始气隙的平均值为2.7 mm,大量的试验数据表明,上、下0.1 mm的波动不会对机构的运动特性有显著的影响;灭弧室内阻均在要求值10 µΩ以内波动。
图8记录了机构刚分时间的变化情况,根据断路器的分断特性,分断过程中,需要提前设定机构的刚分时间,而刚分时间的长短会影响触头的燃弧能量,进而影响真空介质恢复强度。前20次分、合闸操作,由于机构处于运动的磨合期,因此波动较大,之后刚分时间在160~290 μs间波动,均值为225 μs,最大、最小值有正负65 μs的偏差,介质恢复试验证明,这个偏差不会对触头的燃弧能量产生质的影响[14],因此,图8中刚分时间的波动是在允许范围之内的。

图8 机构刚分时间试验数据
由图9可以看出,2000次分、合闸前后触头运动轨迹基本一致,机构的运动特性非常稳定,图中,时间零点即为放电脉冲电流的零点。因此斥力线圈放电回路串入电感的方案可以很好地解决大额定电流下,巨大脉冲斥力制约机构机械寿命的问题,提高了断路器的动作可靠性。

图9 寿命试验前后运动轨迹对比
4 结论
论文通过对直流5000 A电磁斥力驱动式高速触头操动机构动作可靠性的研究,得到如下结论:
1)驱动电容能量不变的情况下,增大电容减小电压的驱动方案可以极大地减小脉冲斥力、提高机构效率,然而驱动电容体积增大,不利于工程应用;
2)仿真与试验结果表明,在斥力线圈放电回路中串联电感,不仅保证了驱动电容的体积尽可能小,也极大地降低了脉冲斥力对机构的机械冲击,有效地提高机构动作可靠性;
3)基于串联电感方案,在确保回路电阻、电感不变的情况下,适当改变斥力线圈的结构尺寸,能够减小驱动电容能量,从而更有利于工程应用;
4)选择电导率较小、相对磁导率较大的钢材作为斥力线圈支撑板,在增强支撑板抗冲击能力的同时,可适当提高机构效率。
[1] 王晨, 张晓峰, 庄劲武, 等. 新型混合式限流断路器设计及其可靠性分析[J]. 电力系统自动化. 2008, 32(12): 61-67.
[2] 庄劲武, 张晓锋, 杨锋, 等.船舶直流电网短路限流装置的设计与分析[J].中国电机工程学报. 2005, 25(20): 26-30.
[3] 王晨, 庄劲武, 张晓锋, 等.基于IGBT的新型直流电力系统限流装置的工作原理与实验研究[J].电工技术学报.2006, 21(9): 57-61.
[4] 王子健, 何俊佳, 尹小根, 等. 基于电磁斥力机构的10kV快速真空开关[J]. 电工技术学报. 2009, 24(11): 68-75.
[5] Jean-Marc M, Alfred R. A DC hybrid circuit breaker with ultra-Fast contact opening and integrated gate- commutated thyristors[J]. IEEE Transactions on power delivery, 2006, 21(2): 646-651.
[6] 毛海涛, 杨锋, 庄劲武, 等. 混合型限流高压转换开关电动斥力简化计算[J]. 高电压技术. 2007, 33(9): 159-162.
[7] 周会高, 杨陶莉, 赵瑞庆, 等. 浅议高压开关设备的温升和机械试验[J]. 高压电器. 2002, 38(5): 60-61.
[8] 史宗谦, 贾申利, 朱天胜, 等. 真空直流断路器高速操动机构的研究[J]. 高压电器. 2010, 46(3): 18-22.
[9] Roodenburg B., Evenblij B.H., Huijser T.. Simulation of a flat spiral inductor-disk geometry for electromagnetic (EM) acceleration[C]. 2nd European Pulsed Power Symposium, Hamburg, Germany, 2004: 202-206.
[10] 贺开华, 乐洪有. 基于Maxwell 2D 的电动斥力操作机构动态特性仿真[J]. 船电技术. 2007, 27(6): 378-381.
[11] Jadidian J. A compact design for high voltage direct current circuit breaker[J]. IEEE Transactions on Plasma Science, 2009, 37(6): 1084-1091.
[12] 江壮贤, 庄劲武, 王晨, 等. 电磁斥力机构中驱动电容参数对触头初始电气间隙的影响[J]. 船电技术. 2012, 32(2): 1-4.
Reliability Optimization Design of DC 5 kA High-speed Contacts Operation System Driven by Electromagnetic Repulsion Mechanism
Wu Jin,Zhuang Jinwu,Wang Chen,Jiang Zhuangxian
(Department of Electrical Engineering of Naval University of Engineering, Wuhan 430033, China)
TM561
A
1003-4862(2013)10-0001-05
2012-11-23
国家青年科学基金项目(51207166)
武瑾(1984-),女,博士生。研究方向:舰船电力系统安全运行。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
新世纪智能(英语备考)(2018年11期)2018-12-29
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
探测与控制学报(2015年4期)2015-12-15
环境科技(2015年4期)2015-11-08
