
基于微处理器的多功能肌电假肢控制系统
2013-04-29 07:08姜乃夫李光林
集成技术 2013年4期
田 岚 姜乃夫 李光林
(中国科学院深圳先进技术研究院 深圳 518055)
1 引 言
国家统计局 2006年的统计数据显示,我国的残疾人总数为 8296 万,其中肢体残疾人数量最多,为 2412万人。由于意外事故、先天缺陷、疾病、自然灾害等原因,肢体残疾人的数量还在不断增加。因此,设计符合肢体残疾人需要的假肢具有十分重要的意义。
目前市场上商业化的功能性假肢有索控假肢与肌电假肢两种。索控假肢存在功能单一、操控缓慢、动作笨拙、维护困难等问题。肌电假肢使用人体皮肤表面采集到的肌电信号(Electromyogram, EMG) 作为假肢的控制信号,但目前的肌电假肢需要用一对肌肉的收缩与放松来控制一个自由度的动作。如果需要控制多个自由度,则先要同时收缩一对肌肉 “切换” 自由度。这种控制方法不符合人们通常控制肢体的习惯,训练过程漫长。
近年来,国内外的研究机构及假肢、机器人公司都在寻求新的方法,设计高性能假肢及控制系统。英国 Touch Bionics 公司的 i-LIMB 手具有 5 个可以独立控制的手指[1],德国 Otto Bock 公司以及上海科生公司均生产了高性能的机电一体化假肢。考虑到传统的假肢控制方式不能让截肢者灵活地操控这些高性能假肢完成日常生活中的复杂动作,人们提出了使用运动神经信息作为假肢控制源的方法,包括使用脑机接口[2-4](Brain-computer Interface, BCI)、周围神经机器接口[5-6](Peripheral Nerve Interface, PNI)以及表面肌电信号解码等。但脑机接口及周围神经机器接口技术存在采集到的神经电信号微弱、信噪比低、需要植入电极等问题,短期内投入实际应用的可能性较低。
研究人员提出了使用肌电信号的模式识别算法实现假肢控制的思想[7,8]。当截肢者通过想象,用他们的“幻影(Phantom)”肢体做不同动作时,来自大脑的运动神经信号使残存肌肉收缩产生 EMG 信号;用体表电极记录该 EMG 信号,并用模式识别方法解码,得到截肢者想要做的肢体动作类型;根据识别的动作类型操控假肢完成相应的动作。利用这种控制方法,假肢使用者可以自然而直接地选择和完成他们想要做的各种不同肢体动作。
目前,模式识别分类算法已经被应用到了假肢控制中[9,10]。使用模式识别分类算法,可以克服目前的肌电假肢存在的功能单一、操控困难、非直觉控制及训练过程漫长等不足,实现肌电假肢的多自由度直觉、自然控制,改善和提高假肢的操控性能。经验证,使用 6 个表面肌电电极、6 个手部及腕部动作(握拳、手张开、腕内收、腕外展、腕内旋、腕外旋)的完成精度可以达到 95% 以上。但是,模式识别分类计算复杂,需要在计算机中完成,不能“嵌入”假肢而应用到日常生活中去。
本文使用高性能的微控制器实现基于肌电模式识别技术的假肢控制,开发便携式假肢控制器,有望实现多功能肌电假肢的灵活控制。
2 系统结构
本文设计了一种使用肌电信号模式识别技术的假肢控制系统,如图1 所示。
整个系统由肌电假肢控制器与多功能假肢临床训练软件两个部分组成。 肌电假肢控制器以高性能微处理器为核心,包括肌电电极、肌电信号采集模块、控制模块、通信模块、电机驱动模块等,可连接多自由度假肢(如三自由度假肢,能完成手腕内收、手腕外展、手腕内旋、手腕外旋、手握拳以及手张开六个动作)。用户需要根据自己的实际情况定制假肢接受腔,并选择合适的位置在接受腔内部安装肌电电极。多功能假肢临床训练软件安装在计算机上,提供一个人机交互界面,用于动作模式的分类训练以及虚拟现实控制。假肢控制器与计算机通过 USB 接口进行通信。
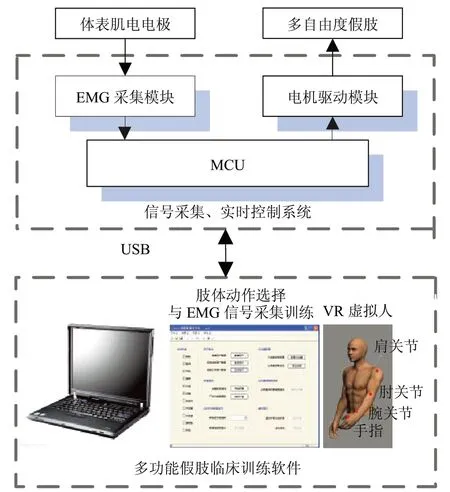
图1 假肢控制系统框图
使用前,首先需要 “训练” 系统识别不同的动作类型。假肢使用者根据软件的提示,用 “幻肢”完成相应动作。软件使用模式识别算法,对采集到的肌电信号进行模式识别分类,计算出动作分类器。动作分类器可通过虚拟现实等方法进行测试,直到分类正确率达到预设的标准。随后将分类器发送到假肢控制器上,假肢控制器使用该动作分类器实时解码肌电信号,在脱离计算机的环境下识别假肢使用者想要完成的动作类型,控制假肢完成相应动作。流程图如图2 所示。

图2 假肢控制系统工作流程图
3 肌电假肢控制器设计
肌电假肢控制器的框图如图3 所示。分为肌电信号采集模块、微处理器、电机驱动模块、USB 通信模块以及电源管理模块几个部分。

图3 肌电假肢控制器硬件框图
3.1 肌电信号采集
肌电信号采集模块的功能是将相应电极检测到的原始表面肌电信号进行放大、滤波处理,经过 AD 转换,得到不失真的数字信号供给后级使用。肌电信号属于高噪声背景下的低频微弱信号,因此肌电信号的采集模块需要尽可能地滤除噪声,保留有效信号。
本文选择 TI 公司面向 ECG/EMG/EEG 信号采集的模拟前端(Analog-Front-End AFE)芯片 ADS1298完成信号采集。ADS1298 内置 8 个差分输入通道,每个采集通道都包括输入信号选通、可编程 PGA、高精度 ADC 以及可配置的导联脱落检测等。同时,芯片内部集成了右腿驱动电路以及内部参考电压,可根据需要配置及使用。ADS1298 集成度高、体积小、性能出色,与传统的分立式肌电采集前端放大滤波电路相比,使用集成的模拟前端芯片能大大缩减 PCB 占用空间、降低功耗,提高系统可靠性。图4 为 ADS1298功能框图[11]。
与传统的分立式肌电信号采集电路相比,ADS1298 并不包括两级放大及滤波,仅在内部集成一个 EMI 滤波器(RC 滤波器)用以消除电磁干扰,右腿驱动模块用以降低工频干扰。芯片采用低放大倍数、过采样 AD,将噪声和数据高保真采集,交给数字端作信号处理。这样就在提高前端集成度的同时保证并提高了性能。同时,用数字端做信号处理,也增加了系统的灵活性。

图4 ADS1298 功能框图
ADS1298 通过 SPI 接口与 MCU 连接,接收MCU 发送的命令,并将采集的数据传送给 MCU。
3.2 微处理器
微处理器是假肢控制器的核心模块,协调系统各个功能的实现。微处理器通过 USB 通信模块接收计算机发来的命令,从肌电信号采集模块取回 EMG 数据,进行预处理(滤波)并发送给计算机。接收计算机得到的分类器数据,使用这些数据进行动作实时分类,通过电机驱动模块控制假肢完成相应的动作。
系统选择 TI 公司的 TMS320F28335 作为控制芯片。TMS320F28335 是 TI 公司 C2000™ 32 位高性能浮点微控制器/数字信号处理器 Delfino 系列的一员[12]。芯片的选择主要基于以下几点:
(1)处理能力强大,32 位 DSP(Digital Signal Processor)构架 CPU,高达 150 MHz 的系统频率,内部集成硬件单精度浮点单元,能实现肌电信号的快速滤波与模式识别算法。
(2)集成了丰富的片内外设,片内集成了脉宽调制(ePWM)模块,串行外设接口(SPI)模块、增强型12 位模数转换器(ADC)模块(16 通道)、以及 88 个具有输入滤波功能可单独编程的多路复用通用输入输出(GPIO)引脚等,能很好地实现外部芯片通信、电机控制等功能,减小设备体积。
(3)具有低功耗和省电模式,延长工作时间。
Delfino 浮点系列 MCU 的功能框图如图5 所示。
3.3 电机驱动模块

图5 C28x Delfino 浮点系列 MCU 功能框图
MCU 采集到肌电信号后,经过模式识别分类算法计算出需要完成的动作类型,控制假肢完成相应动作。本文使用上海科生假肢有限公司生产的前臂假肢,内部有 3 个直流电机。电机驱动模块需要控制 3个直流电机的运行,调节转速与方向。
TMS320F28335 内部集成了 6 个 ePWM 通道作为电机的控制源输出。使用双 H 桥直流电机驱动芯片 L298P 驱动电机工作。电机工作电流反馈到TMS320F28335 内部的 ADC,用于检测及控制转速。
由于电机运行时电流变化较大,会影响到前端EMG 信号采集模块电源的稳定性,引入噪声,因此,在 MCU 和电机驱动模块之间,使用数字隔离器ADuM7440 隔离,保证系统的正常运行。
3.4 USB 通信
假肢控制器与计算机的通信方式选择了USB(Universal Serial BUS 通用串行总线)接口。USB接口是一种通用的计算机与外设连接的方式,具有传输速度快、支持热插拔、使用方便等优点,也便于计算机端的多功能假肢临床训练软件开发。
本文选择了 CH376S 作为 USB 接口芯片。CH376内部集成了 USB 协议的基本固件,简化了常用的控制传输,开发周期短。
3.5 电源管理
锂电池体积小、容量大,适宜作为便携设备的电源。本系统的电源管理模块以锂电池为电源,经过电压转换为各个模块提供各自所需的工作电压。
电源管理模块的主要任务是为假肢控制器提供3.3 V 及 1.8 V 电压,为假肢电机提供 11.1 V 电压,为电机驱动模块提供 5 V 电压。考虑到肌电信号采集模块对电源纹波比较敏感,假肢控制器所需的 3.3 V 电压及 1.8 V 电压由 3.7 V 锂电池经 LDO(Low Dropout Regulator,低压差线性稳压器)芯片电压变换得到。假肢电机供电使用 3 节锂电池串联得到 11.1 V 电压,经过 DC/DC 芯片得到电机驱动模块需要的 5 V 电压。两组电压之间使用数字隔离器隔离。
4 多功能假肢临床训练软件设计
计算机上需要安装多功能假肢临床训练软件,与假肢控制器协同使用。软件使用 Visual C++ 10 编写。多功能假肢训练软件包括三部分功能:肌电信号实时采集、动作分类器的训练及测试以及虚拟现实控制,如图6 所示。

图6 多功能假肢训练软件结构框图
(1)肌电信号实时采集:控制下位机实时采集肌电信号,发送至软件显示,用户通过观察肌电信号可判断肌电电极与皮肤的连接状况并进行调整;
(2)动作分类器训练及测试:使用者在使用前必须进行训练,在软件的提示下完成预设的动作,使用模式识别算法对采集到的表面肌电信号进行训练,得到动作分类器;
(3)虚拟现实控制:建立一个可完成各种手部动作的虚拟现实人,用于动作分类的效果评估或康复训练,动作分类器训练完成之后,软件控制下位机实时采集用户的表面肌电信号,计算动作类型并输出,控制虚拟现实人完成相应动作,用于观察动作分类的效果;同时,建立虚拟环境下的小游戏,可通过完成小游戏进行康复训练。
5 结果与分析
使用本系统,采集肢体健全者前臂的表面肌电信号并训练分类器,实验照片如图7 所示。
实验时,在前臂表面粘贴 8 通道电极,采集到的肌电信号如图8 所示。可以看出,基本滤除了工频干扰及其谐波、高频噪声及基线漂移等噪声。
使用离线数据计算与测试分类器,使用 6 个电极完成 6 个手部、腕部动作,分类精度可以达到 95%以上。
模式识别分类方法已经被验证可用于肌电假肢的控制。但以往的分类都是基于计算机完成,不能嵌入假肢中。与其它系统相比,本系统依然使用计算机完成模式识别分类算法中的动作分类器训练,但是将实时动作分类的部分移植到了微控制器中。因此,动作训练完成后,假肢控制器断开与计算机的连接,用于实际生活中的假肢控制。
本系统已经完成肢体健全者的实时测试,但还未进行截肢者的测试。截肢者的实时信号质量及分类效果有待进一步实验验证。同时,还需全面评估使用者对本系统的使用感受、动作训练时间以及实际动作完成效果。

图7 系统整体调试图
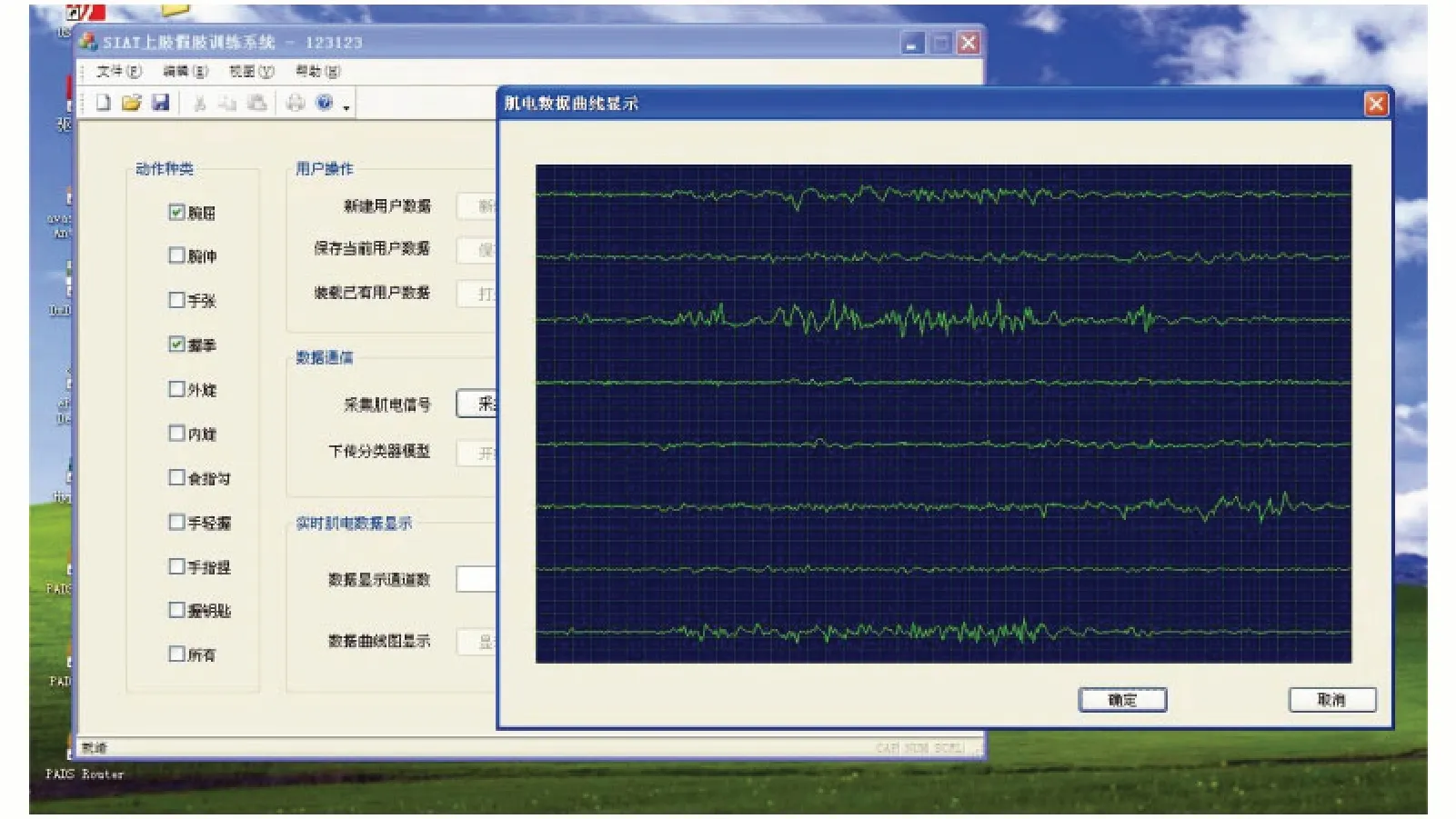
图8 实时肌电信号显示
6 结 论
本文搭建了一套基于微处理器的肌电假肢控制系统,系统能佩戴在使用者身上,使用模式识别分类算法,将采集到的表面肌电信号进行分类,得到使用者希望完成的动作类型,并控制假肢完成相应动作。经测试,检测到的肌电信号没有明显的噪声,信号质量较好。使用离线数据测试分类器,分类精度能达到95% 以上。
[1]查理. 肌电假手的研究进展 [J]. 国防科技, 2007, 9: 6-13.
[2]Hochberg L R, Serruya M D, Friehs G M, et al. Neuronal ensemble control of prosthetic devices by a human with tetraplegia [J]. Nature, 2006, 442: 164-171.
[3]Gao X, Xu D, Cheng M, et al. A BCI-based environmental controller for the motion-disabled [J]. IEEE Transaction on Neural Systems and Rehabilitation Engineering, 2003, 1: 137-140.
[4]杨立才, 李佰敏, 李光林, 等. 脑机接口研究综述 [J]. 电子学报, 2005, 33(7): 1234-1241.
[5]Hoffer J A, Loeb G E. Implantable electrical and mechanical interfaces with nerve and muscle [J]. Annals of Biomedical Engineering, 1980, 8: 351-360.
[6]张晓文, 高忠华, 胡天培, 等. 神经信号控制假肢研究 [J]. 中国生物医学工程学报, 2005, 24(5): 624-628.
[7]Huang Y H, Englehart K B, Hudgins B, et al. A Gaussian mixture model based classification scheme for myoelectric control of powered upper limb prostheses [J]. IEEE Transactions on Biomedical Engineering, 2005, 52: 1801-1811.
[8]21 Hargrove L, Englehart K, Hudgins B. A comparison of surface and intramuscular myoelectric signal classif ication [J].IEEE Transactions on Biomedical Engineering, 2007, 54: 847-853.
[9]Li G, Kuiken T A. EMG pattern recognition control of multifunctional prostheses by transradial amputees [J]. 31st Annual International Conference of the IEEE EMBS, 2009,6914-6917.
[10]Li G, Schultz A E, Kuiken T A. Quantifying pattern recognition—based myoelectric control of multifunctional transradial prostheses [J]. IEEE Transactions on Neural System and Rehabilitation Engineering, 2010, 18(2): 185-192
[11]Texas Instuments Inc. ADS1298 datasheet [EB/OL]. http://www.ti.com, 2011.
[12]Texas Instuments Inc. TMS320F28335 datasheet [EB/OL].http://www.ti.com, 2012.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
海外星云(2021年6期)2021-10-14
中外文摘(2020年19期)2020-10-31
意林·全彩Color(2018年7期)2018-08-13
中成药(2017年10期)2017-11-16
智能系统学报(2017年5期)2017-01-22
现代电生理学杂志(2016年4期)2016-07-10
海军航空大学学报(2015年1期)2015-11-11
中国康复理论与实践(2015年7期)2015-05-09
