
一种振动测量仪的设计
2013-04-25 02:17李剑平罗文广陈文辉杨芝平杨绍传
电子科技 2013年10期
李剑平,罗文广,陈文辉,杨芝平,杨绍传
(广西工学院 电气与信息工程学院,广西 柳州545006)
目前,在工业生产过程中,大部分加工设备都是由电机拖动的旋转设备组成,加工设备传动机构通过联轴器与电机连接,传动结构在电机拖动下旋转工作;如果传动结构在安装过程中,电动机轴向安装不平衡,投入使用后,电机拖动加工设备工作,会导致加工设备在电机轴的水平方向和垂直方向产生振动,振动幅度与传动结构在电机轴向安装的不平衡程度直接相关,如果振动幅度过大,将对设备和现场人员的安全构成直接威胁。因此电机拖动的旋转设备在安装调试过程中和正式投入运行之前,需要测量传动结构水平和垂直方向的振动参数[1],并根据振动情况调整传动结构的电机轴向的安装位置,使传动结构在电机轴向尽量保持平衡,确保传动结构的振动幅度在安全区域内。此外,由于加工设备的安装环境较复杂,振动测量仪器难以在安装位置直接观测,需通过较远距离的无线传输设备,将采集到的振动数据传至手持设备或计算机进行实时观测。
1 系统整体设计
振动测量仪的工作原理如图1所示,由传感器、现场测量部分和上位机部分组成。现场测量部分包括微控制器、调理电路、蓝牙模块、显示器和报警模块等组成,具备振动参数上限设置、现场数据和曲线实时显示、越限声光报警等功能。上位机部分的设计采用ARM7微控制器为核心,配备有液晶显示器、键盘、报警等装置,具有接收现场测量部分发送回来的数据,然后进行与现场测量部分的同步数据显示和同步报警,还具有数据曲线的保存和回放等功能。
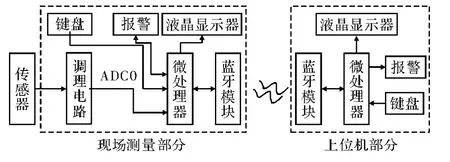
图1 系统工作原理图
2 现场测量部分设计
2.1 振动传感器模块
振动测量仪的技术参数如表1所示。

表1 振动测量仪的技术参数
电机拖动的旋转设备机械振动主要是低频振动,因此选振动频率在0~2 000 Hz范围内的YD-30加速度传感器即可满足要求。该传感器为内置集成压电式IEPE型传感器,高灵敏度、低输出阻抗、抗干扰能力强,适合远距离传输。供电与信号输出共用电缆线。
现场测量部分微处理器选择采用芯片LM3S8962,该芯片基于32位的Cortex-M3核心架构,工作频率可达50 MHz以上,具有丰富的中断资源和片内硬件资源,内部带有10位ADC。
2.2 前置调理电路
典型IEPE传感器需要2~20 mA恒流源供电。由于YD-30传感器内部未加放大和滤波电路,所以输出电压较低,频带一定,而且LM3S8962AD[2]模块的内部参考电压为0~3 V,所以需要加前置调理电路将信号滤波、放大,转换为0~3 V后才能送至LM3S8962的模拟输入通道ADC0。采用AD694产生恒流源,RC构成滤波电路,参数为RC=1/(2πf),其中f=2 000 Hz;并用OP37构成放大电路。前置电路如图2所示[3]。
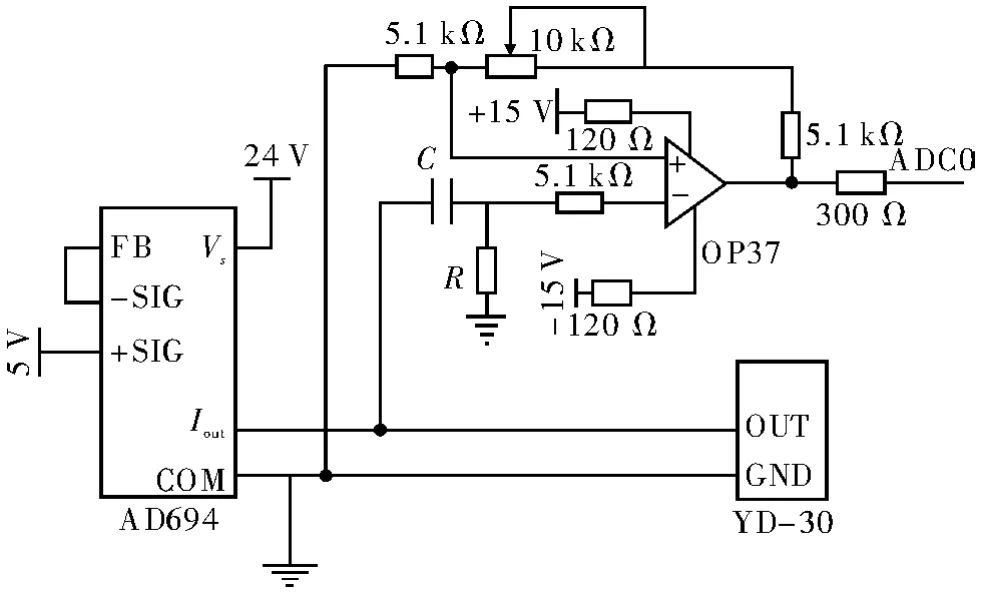
图2 传感器及调理电路
显示模块用于实时显示测量数据和曲线,为满足对振动数据和曲线的显示要求,显示模块选用内部带汉字字库的点阵式LCD12684,可以通过串口方式与微处理器LM3S8962连接。
为满足复杂工业环境下对电机拖动的旋转设备振动测量,振动测量仪引入了蓝牙技术。蓝牙模块选用工业较远距离蓝牙模块BT-1800,通信距离可达1 000 m以上。可将微处理器的串口信号转换成蓝牙信号,实现设备之间的蓝牙无线通信[4-5]。
蓝牙模块BT-1800串行接口与LM3S8962的串行口UART0连接,通过拨码开关SW设置BT-1800的PIO5-IO2输出电平为“0100”,将串口通信的波特率设置为标准串口波特率115.2 kbit·s-1。
3 上位机部分设计
上位机部分具有接收现场测量部分发送回来的数据,实现与现场部分同步数据、曲线实时显示与越限报警功能,还具有数据保存和回放等功能。
上位机部分控制芯片采用LPC2478,其内部集成LCD控制器;液晶显示器采用LMT057DCDFWU-NBN型号TFT显示屏,其内部有TFT控制器,触摸可选,与控制芯片串行连接;蓝牙模块设置与现场测量部分的蓝牙模块匹配。
报警装置采用电磁式有源蜂鸣器12095V5,无电磁及射频的干扰,内部带驱动电路,接控制芯片I/O口。
4 软件设计
为提高测量数据的精度和稳定性,需要对数据进行数字滤波、抗干扰等,然后输出显示、判断报警、向上位机发送数据。采用递推平均值法提高系统测量数据的精度和稳定性。测量程序的主要功能是将振动传感器输出信号进行A/D转换,线性化处理后用LCD进行实时显示,并判断是否越限报警以及通过串口发送至上位机部分。测量部分流程图如图3所示。

图3 测量部分流程图
在上位机软件设计中,首先在内核处理器中移植图形用户界面软件μC/GUI搭建嵌入式图形设计平台[6-7],方便在程序编译过程中调用μC/GUI开放源码对实时曲线进行绘制。在移植过程中根据系统要求对LCDConf.h、GUIConf.h等μC/GUI函数库进行修改,定义数据类型,至此完成显示部分的移植。
系统上电,进行初始化,本地蓝牙通过搜索附近蓝牙设备,并与指定现场部分蓝牙模块建立连接,读取到蓝牙串口的数据,对数据进行线性化处理,判断是否越限报警,记录报警历史;μC/GUI通过调用pixelDraw()画点函数进行数据曲线的绘制并送至显示器进行实时的数据曲线显示,最后将数据曲线进行保存。上位机控制流程图如图4所示。
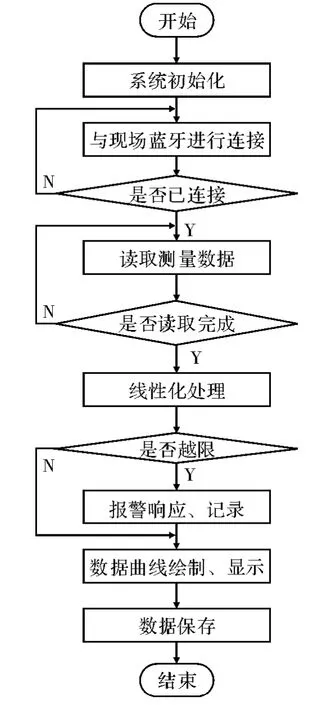
图4 上位机控制流程图
5 结束语
本文以微控制器LM3S8962为核心设计了一种振动测量仪,其通过应用蓝牙技术代替传统振动测量仪的有线连接与上位机进行通信,数据采集过程采用递推平均值法对测量数据进行处理,提高了系统测量精度;上位机实现数据曲线的实时显示、保存、回放,并且具备良好的人性化人机界面设计。该振动测量仪具有电路简单、灵敏度高、稳定性高等特点,在生产条件复杂的工业环境下具有良好的应用前景。
[1] 贺渊明,葛召炎,资道周.基于微变电容式传感器的角度一振动测量方法[J].传感器与微系统,2009,28(5):97-98.
[2]Texas Instruments,Inc.Stellaris LM3S8962 microcontroller data sheet[M].Texas USA:Texas Instruments,Inc,2012.
[3] 徐军,赵敏,雷红路,等.一种基于ARM的航空发电机振动测量仪的研究[J].仪器仪表用户,2007(1):35-36.
[4] 朱丽莉,王朝墀.蓝牙无线通信技术的应用[J].信息技术,2002(12):76-79.
[5] 陈文辉,罗文广,杨叙.基于蓝牙技术的振动测量仪设计[J].实验技术与管理,2010(11):120-123.
[6] 李红岩,侯嫒彬,王秀.基于S3C44BOX的UC/GUI的移植研究[J].微计算机信息,2006,22(2):132-134.
[7] 蔡顺祥.基于DSP的轴承振动测量仪设计[D].郑州:河南科技大学,2010.
猜你喜欢
工业设计(2022年7期)2022-08-12
建材发展导向(2021年13期)2021-07-28
电子制作(2019年9期)2019-05-30
中学生数理化·中考版(2018年11期)2019-01-31
家庭影院技术(2018年10期)2018-11-02
车迷(2018年12期)2018-07-26
家庭影院技术(2018年3期)2018-05-09
电子制作(2017年7期)2017-06-05
玩具世界(2017年8期)2017-02-06
中国老区建设(2016年3期)2017-01-15
