系泊条件下平台罗经航向校准方法研究
2013-04-19 03:06黄浩夏俊杰
中国高新技术企业·综合版 2013年2期
关键词:全站仪
黄浩 夏俊杰

摘要:在系泊条件下,为对平台罗经航向进行高精度校准,文章在借鉴静基座条件下航向校准方法的基础上,提出了一种新型方法。经实践证明,该方法能够完成系泊条件下的平台罗经航向校准,并且精度优于传统方法,满足了系泊条件下平台罗经航向校准要求。
关键词:航向校准;系泊;平台罗经;船用导航设备;陀螺经纬仪;全站仪
中图分类号:U666 文献标识码:A 文章编号:1009-2374(2013)05-0011-03
目前,平台罗经是广泛使用的自主式船用导航设备,为船舶航行提供高精度的航向、水平等姿态信息。陀螺仪是保证平台罗经姿态精度的关键部件,其工作性能会随着使用寿命的增长而下降,直至失效。不同的陀螺仪具有不同的陀螺漂移,会引起平台罗经姿态稳定点的不同。因此,在陀螺仪更换之后,需要对平台罗经姿态进行校准,以提高平台罗经的姿态精度。
平台罗经姿态校准分为水平姿态校准和航向校准。其中,对于系泊条件下的在航船舶,常用的航向校准方法有观测叠标法和观测太阳方位法,但这两种方法容易受到人为观测误差及环境因素的影响,校准精度较低,一般在0.3°以上,不能满足平台罗经对航向精度的要求。为此,本文借鉴了静基座条件下平台罗经航向校准方法,并在此基础上提出了一种可在系泊条件下对平台罗经航向进行校准的新型方法。
1 静基座条件下平台罗经航向校准方法
在静基座条件下,通常采用高精度的陀螺经纬仪、全站仪来校准平台罗经航向。陀螺经纬仪是一种精密定向设备,它和自准直经纬仪通过机械连接组成陀螺寻北仪,在没有大地测量点的无依托的情况下,确定目标相对于北向的精确方位角。全站仪是一种集光、机、电为一体的高精密测量仪器,是集水平角、垂直角、距离、高差等测量功能于一体的测绘仪器系统。
图1 静基座条件下平台罗经航向校准基本原理
在静基座条件下,通过陀螺经纬仪、全站仪进行平台罗经航向校准的基本原理如图1所示,并且操作步骤如下:
(1)使用陀螺经纬仪寻北。在启动陀螺经纬仪之前,要求将0刻度线大致对准北向。陀螺经纬仪经过自摆零位测量、粗寻北、精寻北后测得真北方向。
(2)将陀螺经纬仪测定的真北方向关联至全站仪。在寻北结束后,打开陀螺经纬仪的自准直激光,并使全站仪与经纬仪互瞄,当全站仪瞄准陀螺经纬仪的自准至十字时,输入该方位角数值,即可将真北方向关联至全站仪。
(3)使用全站仪测量航向。将两个反射棱镜分别架设在船舶中心线的船艏点与船艉点上,使用全站仪瞄准两个反射棱镜,测得两个反射棱镜的准确坐标。通过坐标计算得到船艉点到船艏点的矢量方向,即船舶艏艉线航向。
(4)校准平台罗经航向。启动平台罗经并至罗经稳定,以测定的船舶艏艉线航向为真航向来计算罗经差,根据罗经差的大小调整平台罗经航向。
2 系泊条件下平台罗经航向校准方法
经过多次统计观察,在海况较好时,系泊条件下的船舶航向围绕某一中间值在±1°之内变化,并且变化过程具有重复性。利用系泊条件下船舶航向变化的这一特点,并借鉴静基座条件下平台罗经航向校准方法,本文提出了以下这种新型方法来完成系泊条件下平台罗经航向的高精度校准。
2.1 测试设备选择
根据系泊条件下船舶运动特点以及航向校准任务要求,选择GT3-3型陀螺经纬仪与TPS1201全站仪作为测试设备。GT3-3型陀螺经纬仪是一种模块化设计的高精度定向设备,采用先进的阻尼技术和自动寻北算法,有效地提高了定向精度,操作简单快捷,无需人工干预即可给出目标方位角,易与测量人员掌握。TCRA1201全站仪将高精度、多功能及GNSS定位系统的软硬件精巧集成在一起,是该级别全站仪的引领者,具有自动识别棱镜、测量范围大、跟踪性能好、操作简便等优点。
2.2 操作步骤
在系泊条件下,平台罗经航向校准方法的基本原理同静基座条件下的一致,但其操作步骤略有不同,具体如下:
2.2.1 选取航向变化中间值。启动平台罗经并至罗经稳定,观察系泊码头的水流、风力等状况和平台罗经航向变化情况,选取航向变化的中间值。航向中间值精确到角分。
2.2.2 使用陀螺经纬仪寻北。
2.2.3 将经纬仪测得真北方向关联至全站仪。
2.2.4 以航向中间值为测量时机,使用全站仪测量航向。将两个反射棱镜分别架设在船舶中心线的船艏点与船艉点上,使用全站仪瞄准两个反射棱镜,使用对讲机将当前航向实时告知全站仪操作人员。当航向变化到中间值时测量两个反射棱镜的准确坐标。通过坐标计算得到船艉点与船艏点的矢量方向,即船舶艏艉线航向。重复测量,得到多组航向数据。
2.2.5 使用平均值校准平台罗经航向。采用已测定的多组航向数据的平均值作为船舶艏艉线真航向,并计算罗经差,根据罗经差大小调整平台罗经航向。
2.3 误差分析
陀螺经纬仪定向精度为15″/cos(),其中为当地纬度;根据国内各港口的分布情况,陀螺经纬仪定向精度在17″~30″之间。全站仪测角测量精度1″,伺服跟踪状态下全站仪的测距误差为3mm,相对全站仪和舰船之间的几百米距离可以忽略不计。当使用全站仪动态读取船艏点与船艉点的准确坐标时,船舱内观察航向人员在航向变化中间值时告知全站仪操作人员开始测量,整个过程在航向变化±1′之内完成。综合考虑以上各种误差,总误差不会超过2′,满足平台罗经航向精度6′的要求。
3 结语
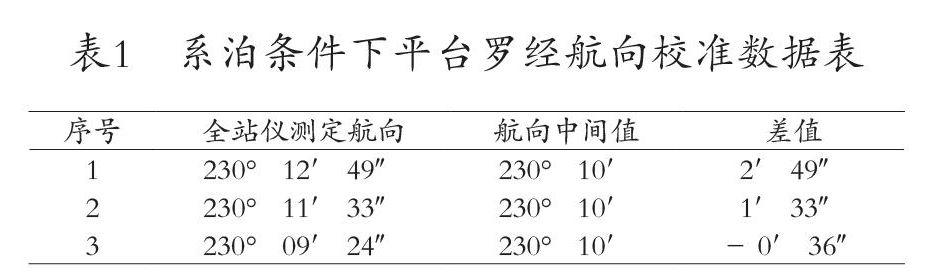
在某次实际修理过程中,对系泊条件下的平台罗经进行航向校准工程,并得到相关数据如表1所示。3组航向数据的平均值为230°11′15″,即船舶艏艉线真航向为230°11′15″,航向中间值为230°10′,罗经差为+1′15″,远小于6′的精度要求。此次校准实践,不仅完成了系泊条件下平台罗经航向校准工程,而且还验证了该新型方法的可行性与可靠性。
参考文献
[1] 王化仁,杨鲲.电罗经测定方位角的校准方法及其误差分析[J].水道港口,2006,(S1).
[2] 顾孝烈,鲍峰,程效军.测量学[M].上海:同济大学出版社,2011.
[3] 孔达,吕忠刚.工程测量[M].北京:中国水利水电出版社,2011.
[4] 吴石林,张玘.误差分析与数据处理[M].北京:清华大学出版社,2010.
作者简介:黄浩(1975-),男,江苏丹阳人,海军上海航保修理厂工程师,研究方向:船舶导航;夏俊杰(1987-),男,浙江青田人,海军上海航保修理厂助理工程师,硕士,研究方向:船舶导航。
(责任编辑:黄银芳)
猜你喜欢
环球市场(2018年18期)2018-09-10
商情(2017年38期)2017-11-28
居业(2017年5期)2017-07-24
居业(2016年6期)2017-02-05
环球人文地理·评论版(2016年5期)2017-01-03
建筑建材装饰(2016年9期)2016-12-29
山东工业技术(2016年23期)2016-12-23
现代职业教育·中职中专(2016年4期)2016-10-21
中国信息化·学术版(2013年5期)2013-10-09
中小企业管理与科技·上旬刊(2009年8期)2009-11-04