
基于ADAMS的四足机器人上下坡运动仿真
2013-03-20 08:33马宗利王建明李华赵彦刘延俊
机床与液压 2013年4期
马宗利,王建明,李华,赵彦,刘延俊
(山东大学机械学院,山东济南250061)
四足机器人实际作业时会经常遇到一定坡度的地形,因此,对四足机器人进行上下坡运动仿真分析是很有必要的。
作者借助于虚拟样机技术,在计算机上建立四足机器人的模型,改变四足机器人各条腿上的关节驱动函数,适当调整四足机器人的躯体姿态,进而维持身体平衡,完成上下坡的运动仿真。通过分析仿真结果可以提前发现一些问题,来改进四足机器人物理样机设计。
1 四足机器人的简化机构模型建立
简化的四足机器人,每条腿具有两个关节,即每条腿上各有髋关节和膝关节。每个关节设计一个自由度[1],其关节配置形式为内膝肘式,即前面两腿为肘式关节,后面两腿为膝式关节。作者应用Pro/Engineer软件建立的四足机器人模型如图1所示[2],其中机器人躯体长1 200 mm,宽400 mm,高120 mm,机器人大腿长460 mm,小腿长457.5 mm。
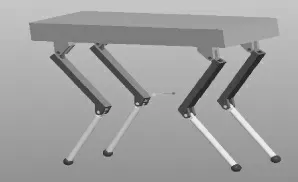
图1 内膝肘式的四足机器人模型
2 四足机器人上下坡仿真用驱动函数的设计
采用内膝肘式的四足机器人来完成上下坡的运动。在机器人上下坡时,需要调整机器人机体的姿态,使得机体平面既不平行于水平面,也不平行于坡面,而是与水平面及坡面各有一定的角度。即机器人上坡时,使前腿髋关节平衡位置后移,膝关节平衡位置前移,同时使后腿髋关节平衡位置后移,膝关节平衡位置前移,这样调整之后就会使得机器人前腿弯曲,后腿伸展,机器人的整体姿态就会变为前低后高,从而更容易上坡;而当机器人下坡时,刚好相反,即前腿髋关节平衡位置前移,膝关节平衡位置后移,同时使后腿髋关节平衡位置前移,膝关节平衡位置后移,这样调整之后就会使得机器人前腿伸展,后腿弯曲,机器人的整体姿态就会变为前高后低,从而更容易下坡。
在仿真中,设置坡面的坡度为10°,上下坡运动时,在调整平衡位置的同时,在上坡时使机器人的前腿髋关节摆动幅值相对减小,在下坡时使后腿髋关节的摆动幅度相对减小。四足机器人采用trot步态实现上下坡运动[3]。
RF (右前腿)髋关节驱动函数由3段函数组成,3种函数的曲线分别如图2所示。
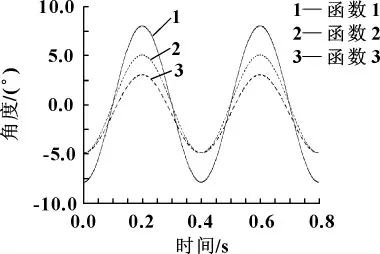
图2 RF髋关节采用的3种函数的曲线
当t=0~0.3 s时使用函数1,当t=0.3~0.4 s时使用函数2,当t >0.4 s时使用函数3,这样完整的RF髋关节驱动函数就如图3所示。
RF 膝关节驱动函数也由3段函数组成,3种函数的曲线分别如图4所示。
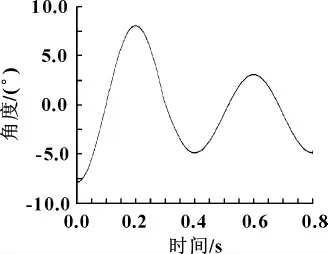
图3 RF髋关节采用的完整的驱动函数曲线
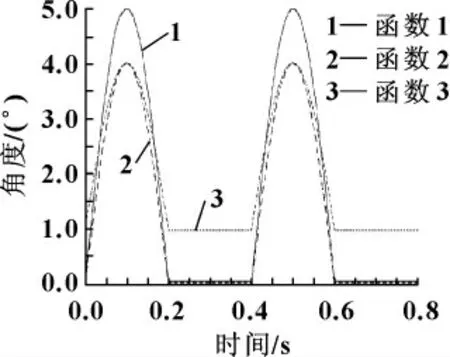
图4 RF 膝关节采用的3种函数的曲线
当t=0~0.4 s时使用函数1,当t=0.4~0.5 s时使用函数2,在当t >0.5 s时使用函数3,这样完整的驱动函数就如图5所示。
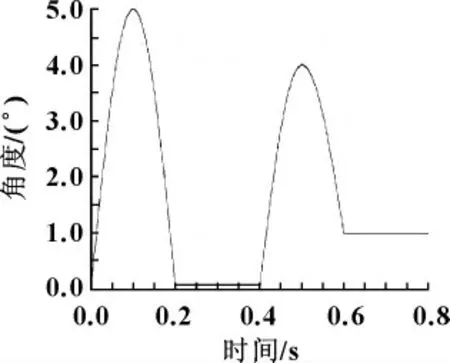
图5 RF 膝关节采用的完整的驱动函数曲线
3 四足机器人上下坡的运动仿真分析
设计的四足机器人完成坡度为10°的上下坡的运动环境如图6所示。

图6 四足机器人完成上下坡运动时的运动环境
3.1 四足机器人机体的上下坡运动仿真分析
对四足机器人机体质心进行上下坡运动仿真分析[4-6],得到机体质心在前进方向、竖直方向以及横向的位移曲线及速度曲线,分别如图7—9所示。
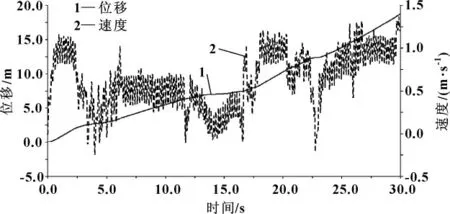
图7 四足机器人机体质心在前进方向的位移曲线及速度曲线
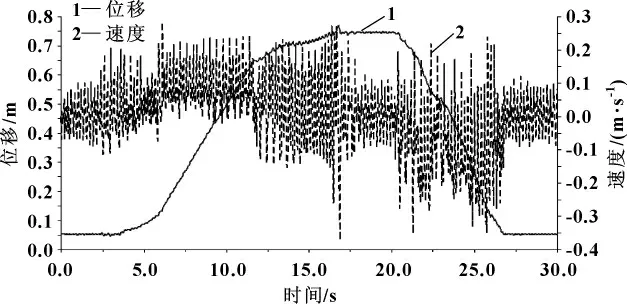
图8 四足机器人机体质心在竖直方向的位移曲线及速度曲线
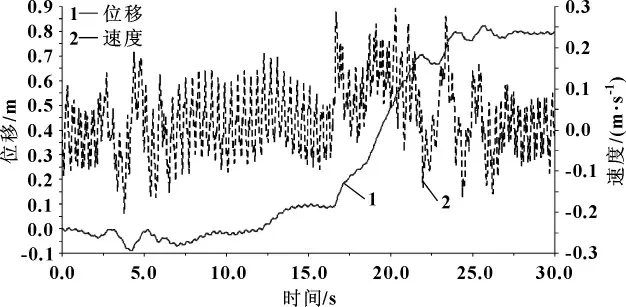
图9 四足机器人机体质心在横向的位移曲线及速度曲线
从四足机器人在竖直方向上的位移、速度图中可以明显地看出,机器人完成了平地—上坡—平地—下坡—平地的完整运动。从前进方向的位移、速度图中可以看出:机器人在从平地转为上坡时和从上坡转为平地时,都有一定程度的打滑,在前进方向上的位移出现停滞不前的情况,机器人在平地上的速度约为1 m/s,上坡的速度约为0.5 m/s,下坡的速度波动比较大,但大体在0.75 m/s处波动。另外机器人在30 s的运动过程中,在横向上大约有0.8 m的偏移量。
3.2 四足机器人足端的上下坡运动仿真分析
以四足机器人的右前腿足端为例,分析机器人足端上下坡运动时在前进过程中的运动情况,见图10—12。
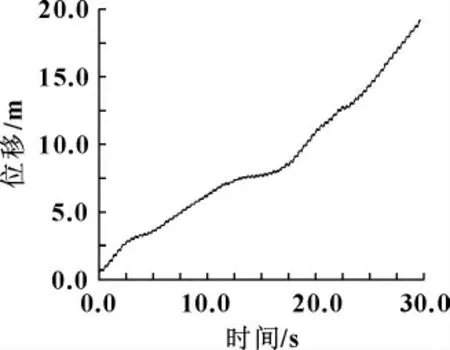
图10 四足机器人右前腿足端上下坡在前进方向上的运动曲线
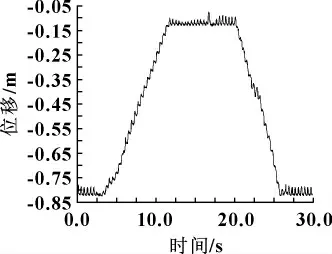
图11 四足机器人右前腿足端上下坡在竖直方向上的运动曲线
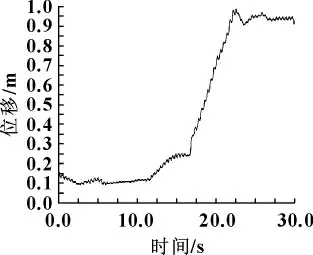
图12 四足机器人右前腿足端上下坡在横向方向上的运动曲线
四足机器人在从平地转为上坡时和从上坡转为平地时,右前腿足端都有一定程度的打滑,前进方向的位移出现停滞不前的情况,其余时间里稳定前进。机器人在竖直方向上的波动和在横向上的偏移量都不大,说明机器人的运动比较平稳。
4 结论
在ADAMS 环境下,对四足机器人虚拟样机模型进行了上下坡的仿真,分析结果表明:四足机器人基本按照预定的轨迹运动,肢体的运动比较协调,且运动平稳,实现了四足机器人的上下坡运动,说明内膝肘式的结构设计方案是合理的,可以实现上下坡。
【1】CRAIG J J.机器人学导论[M].贠超,等,译.北京:机械工业出版社,2006.
【2】段清娟,张锦荣,王润孝.基于虚拟样机技术的四足机器人结构设计[J].机械科学与技术,2008,27(9):1171-1174.
【3】张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学,2004.
【4】张锦荣.基于虚拟样机技术的四足机器人仿真研究[D].西安:西北工业大学,2007.
【5】盛明伟.四足机器人静态步行建模与仿真研究[D].哈尔滨:哈尔滨工业大学,2007.
【6】蔡自兴.机器人学[M].北京:清华大学出版社,2000.
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11
做人与处世(2022年2期)2022-05-26
赤峰学院学报·自然科学版(2021年10期)2021-11-11
数位时尚(幼儿教育)(2018年10期)2018-10-30
中共南昌市委党校学报(2017年6期)2017-02-06
中学物理·高中(2016年11期)2016-12-15
红蜻蜓·低年级(2016年6期)2016-05-14
考试周刊(2015年68期)2015-09-10
中共南宁市委党校学报(2012年3期)2012-08-15
人民论坛·学术前沿(2009年3期)2009-05-27
