非接触测量方法在柱状构筑物垂直度检测中的应用研究
2013-03-06 02:12欧斌
城市勘测 2013年4期
欧斌
(重庆市勘测院,重庆 400020)
非接触测量方法在柱状构筑物垂直度检测中的应用研究
欧斌∗
(重庆市勘测院,重庆 400020)
采用应用研究与生产相结合的方法,在柱状构筑物垂直度检测中引入了地面三维激光扫描技术,与使用比较成熟的全站仪非接触测量方法,从外业数据采集、内业数据处理以及计算结果等进行了对比,获得定量的分析结果。得到了地面三维激光扫描技术在柱状构筑物垂直度检测中的可行性、技术优势。
变形监测;垂直度;非接触测量;三维激光扫描
1 引 言
变形监测是利用测量与专用仪器和方法对变形体的变形现象进行监视观测的工作,其任务是确定在各种荷载和外力作用下,变形体的形状、大小及位置变化的空间状态和时间特征。变形监测工作是人们对变形现象获得科学认识、检验理论和假设的必要手段。
随着科学技术与工业化大生产的发展,高层建筑、超高层建筑等各种构筑物逐渐增多,体型也日趋复杂,对变形监测提出了更高的要求。如城市高层建筑、大型烟囱、桥梁塔柱、桥墩等的变形监测是维护建构筑物正常使用的必要技术措施,其中垂直度检测是其中的一个重要部分。本文针对柱状构筑物,选取墩高65m的立交匝道桥墩,采用技术比较成熟的全站仪非接触投影法进行检测的同时,引入地面三维激光扫描技术进行同步检测,对两种不同方法的外业数据采集、内业数据处理以及计算结果等进行对比,重点研究地面三维激光扫描技术在垂直度检测中的技术可行性及应用方法。
2 技术特点及仪器使用
全站仪非接触投影法是一种不接触、多断面测量,操作简单、能反映柱状构筑物中轴线空间线形状态,通过几何关系进行计算垂直度的检测方法。采用垂直度的非接触投影检测方法,其灵敏度完全能满足《公路桥涵施工技术规范》中的墩台倾斜允许偏差不得超过3‰且不大于20 mm的要求[1]。
地面三维激光扫描技术是一种先进的测量新技术,以高精确、快速、海量、无接触测量等优势在众多领域发挥着越来越重要的作用。与其他非接触式测量方法相比,该技术具有较大的偏置距离和测量范围,对某一区域扫描时,采集点位密度大,数据信息丰富,可以真实反映现实环境;测量准确度高,特别适合测量表面复杂的物体及其细节的测量,实现目标的精细化测量;测量速度快,节约大量的时间,使工作效率提高,劳动强度降低,投入费用也有减少;抗干扰性好,在昏暗的条件下或者夜间都不影响测量。
全站仪非接触投影法采用徕卡TM30智能全站仪,其测角精度0.5″,距离测量精度0.6+1 ppm。地面三维激光扫描采用RIEGL VZ-1000地面三维激光扫描仪,其采用脉冲法测距方式,拥有全波形回波技术(waveform digitization)和实时全波形数字化处理和分析技术(on-line waveform analysis),每秒可发射高达300,000点的纤细激光束,提供高达0.0005°(1.8″)的角分辨率,扫描距离可达1.4 km,它能够产生完全线性、均匀分布、单一方向的扫描激光点云线。
3 方案设计及实施
某环形立交正在进行变形监测,选择其中墩高在60 m~65 m间,墩距33 m~35 m的3个桥墩作为本次研究的检测对象,分别采用两种方案进行检测。由于全站仪非接触投影法使用较为成熟,只做简单介绍。检测墩柱实景如图1所示。

图1 检测墩柱实景图
3.1 全站仪非接触投影法
根据实际条件及墩柱的分布情况,在3个墩柱的近似圆心处布设工作基点1,作为3根墩柱观测的共用点。过墩柱中心并于墩柱与工作基点1连线的垂线方向,各布设一个工作基点,每根墩柱由两个工作基点控制,工作基点到墩柱的距离处于墩高的1.5倍左右,如图2所示。面精细扫描,为保证高精度的数据拼接,扫描时在其他工作基点上设置标靶。
4 数据处理与分析

图2 工作基点布设示意图
4.1 全站仪非接触投影法数据处理
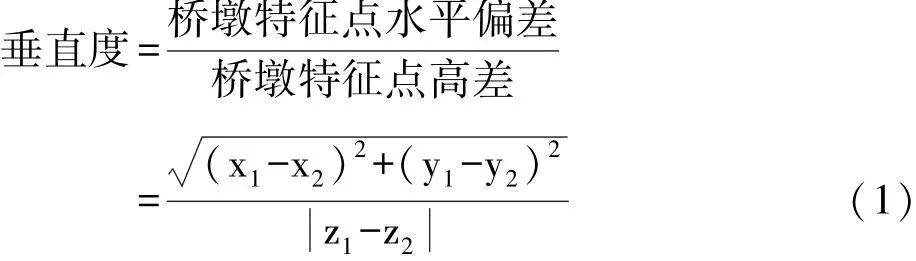
根据测量所得的各基准点到墩柱的水平角、垂直角和到墩柱中心距离等相关数据,计算出墩柱底部、顶部的中心坐标和高程,分别用x1、y1、z1和x2、y2、z2表示,根据垂直度计算公式(式1)计算各墩柱的垂直度。
4.2 地面三维激光扫描数据处理
(1)点云数据拼接与裁剪
如图3所示,单站扫描数据只能反映墩柱的某一个面,对各测站点云数据进行拼接后,才能全面的反映检测对象。点云数据拼接时,应用RIEGL自带的处理软件RISCAN PRO,按程序要求格式建立工作基点坐标文件,读入程序。程序按对应的测站点和公共标靶点进行点云数据旋转和拼接,形成统一的桥墩点云数据文件。拼接后的点云数据需要进行裁剪,去除桥墩周围的非相关点云数据。墩柱面拟合时,根据点云数据的反射强度,首先去除反射较弱的点云数据,然后根据选取的反射强度较高的点云数据,取其点云厚度平均值作为墩柱面,去噪后的墩柱点云数据如图4所示。
在各工作基点上设站,水平角采用测墩柱两侧取平均角,距离采用测到墩柱边缘的水平距离加墩柱相关尺寸求中心的方法,分别对各墩柱的墩底部和墩顶部进行观测。
3.2 地面三维激光扫描
采用RIEGL VZ-1000地面三维激光扫描仪,在图2中的5个工作基点上设站,分别对3根墩柱进行全

图3 单站扫描数据原始点云数据 图4 1号桥墩点云数据
(2)墩柱中心坐标提取及垂直度计算
在本次应用研究中,除计算墩柱顶部到底部的垂直度外,增加了墩柱顶部到中部的垂直度计算。为获得准确的墩柱底部、中部和顶部的中心坐标,分别在桥墩底部、中部和顶部截取一段点云数据,在截取的数据中做一水平截面,把水平截面的中心点作为计算墩柱垂直度的特征点,水平截面的具体高度位置根据墩柱整体扫描数据确定。截取部分点云数据如图5、6、7所示。
水平截面的中心点坐标按几何关系直接量取,如图8所示。桥墩底部、中部和顶部截取水平截面中心坐标位置关系如图9所示。
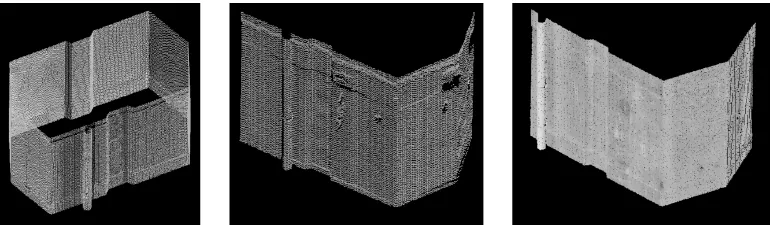
图5 1号桥墩底部点云数据 图6 2号桥墩底部点云数据 图7 3号桥墩底部点云数据
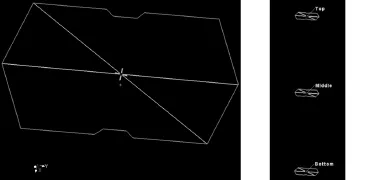
图8 墩柱中心坐标提取 图9 墩柱截面位置关系
各水平截面中心点的高程,可直接在点云截面数据中量取,也可直接量取其相对高差。该项目通过在水平截面上量取获得各墩柱其底部、中部和顶部中心点的坐标,如表1所示。
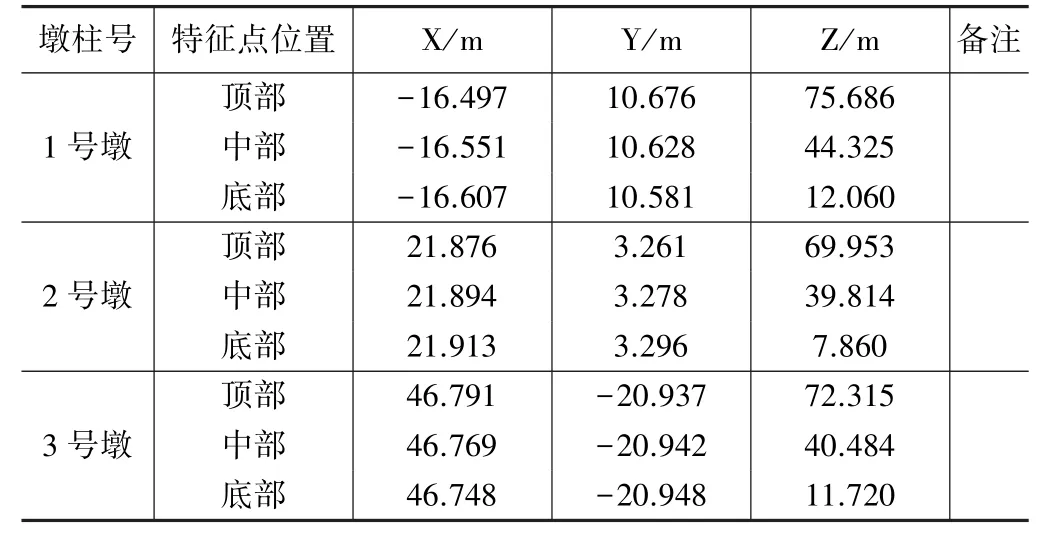
墩柱特征点坐标 表1
将表1中的数据根据不同部位,对应的代入式(1),计算各墩柱及各部位的垂直度。
4.3 垂直度对比分析
根据公式计算得到3根墩柱的垂直度,并与常规测量数据结果比较,如表2所示。

桥墩垂直度比较表 表2
从表2可以得出,各墩柱采用地面激光扫描技术测量垂直度与常规测量结果接近,均真实反映了墩柱的变形情况。各墩柱通过分段测量和计算垂直度,分段数据取平均值后可以对整根墩柱垂直度计算值进行检核,保证测量数据的准确性和高精度,满足墩柱检测的要求。
5 结 语
通过本文的对比分析,地面三维激光扫描仪能满足墩柱垂直度的测量。三维激光扫描技术在墩柱垂直段检测方法上与常规方法比较,有其独特的优势。
(1)外业工作效率高,可24小时作业。本次观测平均每站测量20 min,外业用时0.5个工作日,较常规测量方法节约了1个工作日。
(2)获取数据更丰富,可利用数据更多。常规方法获取数据只有顶部和底部数据,三维激光扫面获取点云数据以万计数,可任意切取面进行数据分析和处理。
(3)针对墩柱垂直度检测,地面三维激光扫面仪器设站灵活,不受周边条件的限制,配合“云台”等设备,可进行360°扫描。
文中引入的基于地面三维激光扫描技术的墩柱垂直度检测方法,不仅适用于桥梁墩柱、烟囱等柱状构筑物的垂直度检测,而且可应用于工业厂房、高层及超高层等建筑的垂直度检测。
[1] 余加勇,邵旭东,朱建军等.柱状构筑物垂直度非接触检测方法及其精度分析[J].武汉理工大学学报·交通科学与工程版,2008,32(6):1153~1156.
[2] 欧斌,黄承亮.三维激光扫描技术在分方测量中的应用研究[J].城市勘测,2012(2):123~125.
[3] JTJ 041-89.公路桥涵施工技术规范[S].
[4] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[5] 郑德华,雷伟光.地面三维激光影像扫描测量技术[J].铁路航测,2003,(2):26~28.
[6] 郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32~34.
The Application and Research of Non-contact M easurement M ethod in Detecting Degree of Gravity Vertical Columnar Structure
Ou Bin
(Chongqing Surveying Institute,Chongqing 400020,China)
This paper is used researching and producing method,it’s imported 3D laser scanning technology and mature total station non-contactmeasurementmethod in detecting degree of gravity vertical,contrasted with field data collection、data processing and computed result,obtained quantitative analysis result.It get feasibility and technological advantage of 3D laser scanning technology in detecting degree of gravity vertical columnar structure.
deformation monitoring;degree of gravity vertical;non-contactmeasurement;3D laser scanning
1672-8262(2013)04-142-03
P258,P234.4
B
2012—10—07
欧斌(1977—),男,高级工程师,主要从事工程测量及数据处理工作。
猜你喜欢
建材发展导向(2022年3期)2022-04-19
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年6期)2021-06-09
矿产勘查(2020年1期)2020-12-28
山东交通科技(2020年1期)2020-07-24
水电站设计(2020年4期)2020-07-16
石油化工建设(2019年6期)2020-01-16
工程与建设(2019年3期)2019-10-10
中华建设(2019年7期)2019-08-27