
基于单片机的智能航天模型发射系统
2013-02-23 09:14上海市第八中学李懿德
发明与创新 2013年35期
文 上海市第八中学 李懿德
基于单片机的智能航天模型发射系统
文 上海市第八中学 李懿德
作为上海黄浦区青少年科技活动中心航天模型组与机器人组的成员,我经常参加航天模型竞赛,发现许多初学者在赛场上会因为心理紧张出现手忙脚乱的现象。
在赛场上,一个细微的疏忽便会影响最终成绩。如果有一套自动化的系统使整套发射动作方便、快捷,将会给初学者带来许多益处。因此,有必要研制一套智能航天模型的发射系统。
通过查阅航天模型的相关文献和资料,我发现目前航天模型发射的一般方法都是人工组装发射架,然后用点火控制器手动点燃模型火箭发动机使火箭升空。点火时的风速极大地影响了模型火箭的飞行高度,进而影响滞空时间,如此重要的一点却常常被选手遗忘。
另一种方法是将玩具车改装成主要用于发射表演的航天模型发射车。目前还没有一套用于竞赛、能自动行驶至安全半径、选择发射窗口再实现发射架自动起竖、点火的发射系统。
因此,基于单片机技术来实现这一系统,具有实用价值。
一、设计目标
针对本研究的目的与意义,设计目标如下:
1.该系统能按预定轨迹到达安全半径内的指定位置。
2.发射场实时风速确定发射窗口。
3.起竖迅速、稳定,点火及时。
4.各部件坚固耐用。
5.控制电路能稳定工作。
二、研究方法
根据设计目标,确定系统设计方案,基本思路是将AVR单片机的控制器用于控制整个发射系统,板材制作发射系统本体,设计合适的发射架,并将市售的风速传感器加以改进来测风速。
本项目涉及机械工程、电子技术和自动控制技术,研究内容包括硬件和软件两部分。由于该发射系统需要自动点火,为防止单片机短暂失电导致电子电路工作紊乱而失控,点火电路需单独设置。
主要设计工作包括硬件结构总体设计、风速传感器的选择及控制流程设计。
1.硬件实现
(1)发射架的选型
模型火箭发射架主要有导杆式和导轨式两种,若使用导杆式发射架则需在模型火箭外增加1至2个导向管,发射时,导向管套入发射架,可实现定向引导。
模型火箭高速飞行时,有导向管会增加不少阻力,而使用导轨式发射架则可以摒弃导向管,所以我决定选择导轨式发射架。
(2)发射架起竖机构的实现
在初样研制阶段,我采用直流电机加装齿轮组使之带动丝杠转动,从而实现顶杆运动,完成了发射架的升降。
(3)风速传感器的实现
通过比较市场上出售的风速传感器的适用范围和价格,最后选定较便宜的小型风杯式风速传感器。
它采用光电门测速的方式,能有效测量实时风速。为适应该项目使用的单片机,我更换了光电门,增加了两个电阻,并通过编程的方式使输出的信号转变成数据。
(4)寻迹行驶功能的实现
采用一般搜救机器人上常见的灰度传感器,使之能根据灰度沿地面的黑线行驶,并在标记处停下。
(5)自动点火的实现
利用发射架固定环上的长螺丝,把模型火箭发动机点火头的两条引线接在长螺丝上,在发射架起竖至与地面垂直后长螺丝与铜片接触,干电池的正负极各接一块铜片,这样便形成了闭合回路,模型火箭发动机随之点火,火箭升空。
2.实物样机及测试
(1)样机(初样)模型如下图所示:
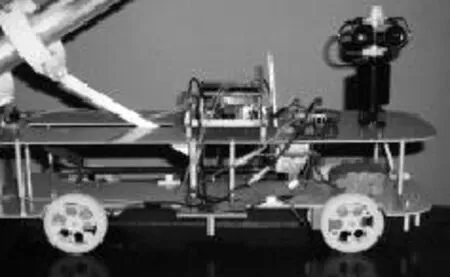
(2)整机测试及总结
测试结果表明,样机基本达到预期效果,各分系统均正常工作。但在实验过程中也发现了以下不足:
1.两车轮间距太大,转向时极为不便。优化方案:缩小两轮间距。
2.发射架起竖时噪声大,长时间使用齿轮会打滑,丝杠带动螺母时顶杆和发射架甚至整个车身都产生共振,导致模型火箭发动机点火头脱落。优化方案:拆除丝杠,缩短机器人本体两板间铜柱长度,改用大扭力伺服电机(舵机)及云台组成单自由度云台完成发射架起竖。
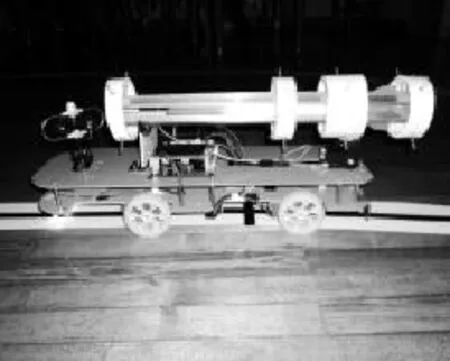
改进后正样如下图:
起竖机构还可用步进电机和转动机构,该起竖机构由步进电机驱动而带动发射架转动,转动机构可采用现有技术中的任何一种转动机构,只要能实现发射架的起竖即可。
控制器记录用于驱动步进电机转动的脉冲个数,根据脉冲个数、预设角度和步进电机的步距角之间的关系,产生所述触发信号,控制器由该触发信号控制而比较风速传感器感测的风速信号和发射窗口。
三、总结与展望
长久以来,我一直在航天模型的赛场上观察各个年龄段参赛选手的临场发挥。在国家级赛事的赛场上,要求选手在一小时内现场制作出两枚模型火箭并现场发射,普通竞赛级发射装置虽能达到效果,但组装调试的过程非常麻烦,也容易出现失误,对于刚做完作品的选手来说,无疑是雪上加霜,时间上的限制也极易造成心理紧张。
本课题的出发点就是运用现代化的智能技术,实现航天模型发射的自动化和简易化。
该智能发射系统不仅实现了航天模型发射的自动化,还能判读发射场的实时风速,选择合适的发射时机。今后,我还将完善该系统,让其实现在有风条件下的自动发射。
通过检索,我发现辽宁省一所学校有通过手动遥控方式调整发射架与地面的角度来达到目的的方案,而通过自控方式实现此功能的方法还没有。我今后的改进设想是,在机器人上装一个风向传感器,把发射架起竖装置的单自由度云台改为双舵机二自由度云台,即可实现发射架的俯仰及左右水平旋转,再通过编程控制,根据风向和风速确定发射架的偏转角度和方向。
另外还可以结合河北科技大学最新研发的模型火箭发射同步计时装置(通过专利检索得知),利用双路开关的两对触点分别控制模型火箭和计时装置的启动(现在主要的航天模型比赛都以滞空时间作为比赛成绩),不仅简化了操作过程,而且实现了模型火箭点火和计时的同步,彻底消除了人为因素对计时精度的影响,使比赛更加公平、公正且实现了航天模型竞赛的实质自动化。
通过此项目的研究,我意识到理论设想与实际落实之间的差距——丝杠设计源于理论上的“可行”,而当产品做出后却出现了种种意想不到的状况,因此产生了“归零”的处理。
在这个项目的实现过程中,我学到了许多制作方法。比如接插件与导线的连接、金属端子压线的方法等。这个项目的编程对我来说也是一种挑战,在这期间,我自学了控制程序的方法,并通过大量训练、实验,最终熟练掌握了一套程序,将其应用到本项目中。
所以,只有当创新的思维火花、扎实的专业基础和不懈的努力付出共存,才可能实现自己的梦想!
(指导老师:赵金才)
猜你喜欢
电机与控制应用(2021年12期)2021-02-28
海洋通报(2020年5期)2021-01-14
装备维修技术(2020年17期)2020-12-28
国防科技工业(2020年1期)2020-01-16
军营文化天地(2017年7期)2017-09-25
西南交通大学学报(2016年4期)2016-06-15
小朋友·快乐手工(2016年5期)2016-05-14
小朋友·快乐手工(2015年10期)2015-11-02
电网与清洁能源(2015年3期)2015-02-28
中国高新技术企业(2012年2期)2012-03-22
