
亚像素细分在光学自准直系统观测中的应用*
2013-02-13 05:43史雨辉刘延飞
大地测量与地球动力学 2013年2期
张 亿 路 杰 史雨辉 刘延飞 郑 勇
(中国地震局地震研究所(地震大地测量重点实验室),武汉 430071)
1 引言
传统光学自准直系统都是通过人眼进行观测,由于人眼分辨率的限制和观测人员的熟练程度,对观测系统的观测精度有一定的影响;同时观测人员长时间使用眼睛进行观测,容易疲劳,增加观测人员的劳动强度。为此,本文提出了一种基于CCD 探测器和数字图像处理技术的观测方法。采用面阵CCD 作为光电探测器件,对目镜视场内的光学图像进行采集,将采集到的数字图像送入计算机。通过图像处理技术对数字图像进行处理,得到视场内目标的精确位置,从而提高目视系统的观测精度。
2 基于CCD 光学自准直系统的观测方法
图1 为光学自准直系统的结构原理图。整个光路的原理为:普通白炽灯泡(S)发出的光经过绿色滤光片(F)后,射向聚光镜组(L1),聚焦后射向反射棱镜(P1),经反射后到达平面反射镜(P2),在平面反射镜(P2)靠近反射棱镜(P1)的一侧镀有铝膜层,镀铝面上是刻穿了铝膜层的十字刻线。光线透过十字刻线的缝隙投射到平行光管的物镜(L3)上,平面反射镜(P2)的十字刻线位于光管物镜(L3)的焦平面上,因此透过物镜(L3)的光线将成为平行光束射向平面反射镜(P4),被反射回来的光线再次经过物镜(L3)将成像于物镜的焦平面上,即平面反射镜(P2)的镀铝面上。十字刻线本身及其返回像经平面反射镜(P2)反射,通过显微物镜(L2)聚焦和平面反射镜(P3)反射,最后成像于瞄准分划板(M1)上。

图1 光学自准直系统原理图Fig.1 Principle of optical auto-collimation system
根据光学自准直系统原理,提出了一种基于CCD 的光学自准直系统观测方法。该方法是通过夹具将CCD 相机固定在光学自准直系统的目镜上进行数字图像采集,CCD 相机采集的图像通过USB接口传送到便携式PC 机上,然后通过图像处理技术,将处理后的结果显示在PC 机上(图2)。
在实验室环境中,搭建的光学自准直观测系统如图3。
本光学自准直系统主要由4 部分组成:
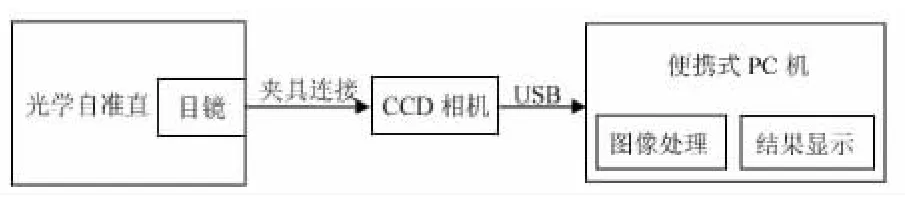
图2 基于CCD 的光学自准直系统观测原理图Fig.2 Observation principle of optical auto-collimation system based on CCD

图3 基于CCD 的光学自准直系统Fig.3 Optical auto-collimation system based on CCD
1)平行光管
实验中采用的的是F550 的平行光管,其焦距为550 mm,口径为55 mm,相对孔径为1∶10;同时选用5.7 倍放大率的高斯目镜,以十字分划板为观测目标。
2)CCD 相机及其支架
CCD 相机选用的是深圳迪美捷公司生产的DC140M 黑白相机,其感光元件采用的是SONY 公司生产的1/2″CCD,像元尺寸为4.65 mm × 4.65 mm,有效像元数为1 360 H ×1 024 V,帧率为7.5 fps,相机的外形尺寸为40 mm ×40 mm ×90 mm,通过USB 给相机供电和传输数据。同时提供了SDK,可供二次开发,并可以编程控制曝光时间、白平衡、RGB 增益、GAMMA 校正、图像尺寸等。与CCD 相机配套的镜头是日本COMPUTAR 公司生产的M1614-MP 型光学镜头,其焦距为16 mm,相对孔径为1.4,像面尺寸为2/3″,最大视场角为38.0°。
用于支撑相机的支架采用的是实验室的光学支架,其可以在X、Y、Z 三个方向进行移动。在调整相机与平行光管位置时,通过调节支架使得相机镜头的光轴尽量与目镜的光轴尽量重合,从而减小成像误差。
3)便携式计算机
第三,鸦片贸易合法化,并明确规定了鸦片进口关税税率。《中英通商章程善后条约》第五款规定:“向来洋药、铜钱、米谷、豆石、硝磺、白铅等物,例皆不准通商,现定稍宽其禁,听商遵行纳税贸易。洋药准其进口,议定每百觔纳税银叁拾两”“洋药”即鸦片,并规定鸦片进口实行从量税,每百斤纳税三十两白银。
实验中图像采集和数据处理是在便携式计算机上进行的,计算机安装了VC++ 6.0 软件和CCD 相机驱动软件。通过VC ++ 6.0 编制程序,使用厂家提供的API 函数对相机参数进行设置并采集图像,然后对图像进行处理得到结果,最后将结果显示在计算机屏幕上。
4)调整式平面反射镜
调整式平面反射镜可以通过后面的调节旋钮完成绕Z 轴的转动和绕Y 轴的转动。
在搭建好上面的光学自准直系统后,若调整式平面反射镜与光轴垂直,则返回像与十字刻线重合,在计算机屏幕上只会出现一个十字像;如果平面反射镜与光轴有一微小倾斜角,则屏幕上就会出现两个十字像。图4 所示图像是平面镜绕Y 轴有一个微小角度倾斜得到的。
3 亚像素细分
对于目标的亚像素级边缘检测,传统的处理过程[1]是:先对图像进行滤波处理,消除噪声的影响;接着,利用传统像素级边缘检测算子,得到目标像素级边缘;最后,使用亚像素细分算法进行定位。
本文采用了一种简便的亚像素级边缘定位方法。

图4 经CCD 相机采集到的十字丝图像Fig.4 Reticle image acquired from CCD camera
进行十字丝的粗定位[2],图像分割后图像如图5 所示。

图5 图像分割后十字丝图像Fig.5 Reticle image after image segmentation
确定十字丝的像素级边缘位置(图6)[3]。
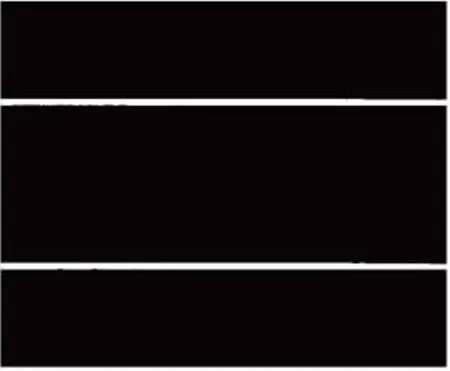
图6 积分法后十字丝图像Fig.6 Reticle image after integral method

式(1)反映了全部测量值于回归值之间的偏离程度。要使回归曲线与全部测量值最接近,就要求两者的偏离程度最小。根据极值条件有

结合式(1)、(2)可得:
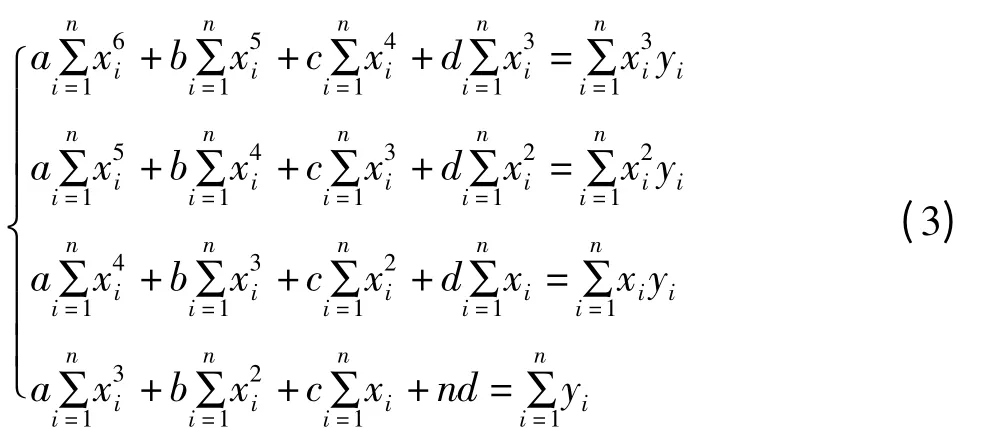
(n=取样点数)
在拟合之前,首先在原图像中像素级边缘点左右取点,共8 点。为了减小拟合误差,在取点过程中,对于异常点予以剔除;然后将这些点代入式(3)求取a、b、c、d;最后根据亚像素点的坐标得到边缘的亚像素位置。
根据亚像素边缘位置,采用最小二乘拟合法得到精确的边缘直线方程,据此求得横丝的精确中心,从而得到两横丝之间的间距。
4 实验结果
实验中采用高精度微动装置改变平面反射镜P4 的角度,然后使用数字图像处理软件计算两横丝之间的距离。为了对比方便,计算时已经将平面镜的微动角度转换为横丝之间的微动距离。
为了检验亚像素细分算法的有效性,在数据处理过程中,同时计算了未使用亚像素细分算法得到的结果。未细分的计算过程是在得到像素级边缘位置以后,直接根据像素级边缘位置来拟合边缘直线,然后取得十字丝中心,进而求得两十字丝之间的距离。测量数据如表1,微动距离为微动装置步进的距离,软件计算的结果是微动前后十字横丝之间距离的差值,误差为微动距离与软件计算结果之间的差值。
从表1 可以看出,从个体来看,只有个别点细分误差比未细分误差大,因CCD 误差、光学误差和算法误差等综合影响可以将其当做误差点;从整体上看,未进行亚像素细分的软件计算结果误差在2 μm以内,而经过亚像素细分后误差在1μm以内(其中微动装置的单步误差为0.07 μm),细分后误差均值和方差相比未细分的结果都有所减小。

表1 垂直方向测量数据Tab.1 Data of vertical direction
5 结论
提出了一种基于CCD 的光学自准直系统观测方法,并将亚像素细分算法运用到目标的亚像素定位中;同时提出了一种简便的亚像素边缘定位方法。实验结果证明,亚像素细分技术相比传统边缘定位方法,在目标边缘定位上精度更高,有效地提高了光学自准直系统的观测精度。
1 徐凤茹,等.基于视觉跟踪式自准直仪的十字线提取技术[J].激光与红外,2011,41(11):1 212-1 213.
2 冈萨雷斯.数字图像处理(第三版)[M].北京:清华大学出版社,2011.
3 史雨辉,路杰.高精度水平基标准装置自动化图像处理研究[J].大地测量与地球动力学,2010,(增刊Ⅱ):129-131.
4 陈静,尚雅层,田军委.快速多项式拟合亚像素边缘检测算法的研究[J].应用光学,2011,32(1):91-95.
猜你喜欢
新能源科技(2022年9期)2022-11-20
文史春秋(2022年4期)2022-06-16
数学大王·趣味逻辑(2021年3期)2021-03-10
华人时刊(2020年23期)2020-04-13
环境技术(2020年1期)2020-03-06
汽车观察(2018年12期)2018-12-26
数学大世界(2018年1期)2018-04-12
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
专用汽车(2016年9期)2016-03-01