锂电池储能系统充放电的双闭环自抗扰控制器设计
2013-02-10 06:13郑天文刘锋肖先勇周业如梅生伟
电机与控制学报 2013年11期
郑天文, 刘锋, 肖先勇, 周业如, 梅生伟
(1.清华大学电机系电力系统国家重点实验室,北京 100084;2.四川大学电气信息学院,四川成都 610065;3.宣城供电公司,安徽宣城 242000)
锂电池储能系统充放电的双闭环自抗扰控制器设计
郑天文1, 刘锋1, 肖先勇2, 周业如3, 梅生伟1
(1.清华大学电机系电力系统国家重点实验室,北京 100084;2.四川大学电气信息学院,四川成都 610065;3.宣城供电公司,安徽宣城 242000)
针对锂电池储能系统(battery energy storage system,BESS)具有非线性、时变、强耦合的特征,以及模型误差和不确定外扰对系统控制的影响,基于自抗扰控制(active disturbance rejection control,ADRC)技术对BESS充放电控制策略与实现进行了研究。首先建立了适用于自抗扰控制的BESS数学模型;然后提出了BESS自抗扰控制一般设计方法;最后设计了BESS双闭环自抗扰控制方案,并在PSCAD/EMTDC环境中构建了仿真模型,比较分析了采用传统PI控制和自抗扰控制时BESS的动态性能。仿真结果表明,双闭环自抗扰控制下的BESS充放电控制,在充电电压/电流等参考值变化、电网电压波动以及系统参数变化等工况下,相比传统PI控制,均具有更好的动态品质和抗扰动能力。
锂电池储能系统;充放电控制;自抗扰控制;不确定扰动
0 引言
风能、太阳能等新能源发电是传统发电形式的重要补充,其在电力能源中所占比例也逐年增加[1]。然而,风电、光伏发电等电源由于自身的间歇性、波动性以及负载的随机性,会严重影响公共联接点(point of common coupling,PCC)的电能质量和系统稳定。
锂电池储能系统(battery energy storage system,BESS)作为可控电源,可实现“储能-电网”之间的能量互动,使新能源并网发电接入更趋稳定,有利于保障“‘源’-‘网’-‘荷’-‘储’”系统功率实时平衡。BESS不仅可存储剩余电能,应对电网失电等突发事件,还能配合调度系统,起到“削峰填谷”的作用。以BESS为基础的电力控制、调节与分配,可实现能源合理高效地利用[2-4]。
一般地,BESS的控制设计有如下需求:充电时直流侧电压、电流波动小,冲击小;放电时交流侧并网电流正弦度高,谐波含量低。且在充放电过程中,BESS需具备较强的抗扰动能力。
目前BESS的控制系统大多基于传统PI控制,难以满足上述需求[5-6]。文献[5]提出了基于 PI控制器的储能系统直流侧电压控制,虽稳态时直流电压波动较小,但出现了超调现象,有较大冲击;文献[6]提出采用双环PI控制策略实现电池充放电,但并网电流电能质量较差。究其本质,主要是电池储能系统具有非线性、时变、耦合的特征,基于线性化的PI控制,难以实现良好的控制效果。在现有关于BESS控制研究中,很少有文献考虑电池储能系统的上述特征,尤其是系统等效参数发生变化或外界存在不确定干扰时,控制系统应如何设计,更鲜有提及。理论上,BESS控制属于一类典型的非线性鲁棒控制问题。主要的解决途径有两类,一是将其转化为HJI(hamilton-jacobi-issacs)不等式求解,实现对干扰的抑制[7];二是采用基于受控能量函数的方法,通过设计控制器使得系统能量函数在不确定性条件下的导数为负来实现控制性能的鲁棒性[8]。然而,这两条途径一般需要受控对象较为准确的动态模型,且较难考虑时变因素的影响。
自抗扰控制(active disturbance rejection control,ADRC)技术是一种针对非线性、时变、耦合和不确定系统的鲁棒控制方法[9]。基于ADRC技术的控制器具有超调小、收敛速度快、精度高、抗干扰能力强和算法简单等优点。正因如此,ADRC已在电能质量、光伏并网发电以及风力发电系统等领域中得到应用[10-13]。文献[10 -11]分别将自抗扰控制引入动态电压恢复器和静止无功发生器,解决了动态响应速度慢和稳态误差大的问题,提高了系统电能质量;文献[12]针对光伏并网逆变控制系统的特点,将自抗扰控制器应用到光伏三相并网发电中,提高了并网点电流波形质量,减小了对电网的冲击;文献[13]研究了大型风电机组转速自抗扰控制技术,实现了风速变化时的最大功率点快速跟踪,提高了风能的捕获效率。
本文在现有研究基础上,综合考虑BESS具有数学模型难以精确获得且在实际应用中存在不确定干扰等固有属性,基于自抗扰控制技术,提出了一种不依赖于BESS系统精确数学模型,且能提高BESS控制性能的综合控制策略。
论文首先介绍了ADRC基本思想和设计原则,然后建立BESS数学模型,并针对其模型特点进行自抗扰控制器设计,提出了BESS的综合控制策略;最后在不同扰动场景下,比较了传统PI控制和自抗扰控制的性能,验证了所提方案的正确性和有效性。
1 ADRC基本原理
ADRC汲取了经典PID控制和现代控制理论的优点,并对PID控制进行了改进。ADRC是一种基于量测的建模,其核心思想是将系统模型的不确定性(内部扰动)和其他不确定性(外部扰动)一起作为“总扰动”,通过构造“扩张状态观测器”对“总扰动”进行估计并实时补偿[9,14-16]。

对于n阶非线性系统,有其中:f(y,y',…,y(n-1),t)为系统函数,可表征模型的不确定性;w(t)为系统其它不确定扰动;u为控制项,b为控制量增益。
ADRC的基本框架如图1所示。

图1 自抗扰控制的基本框架Fig.1 Diagram of ADRC
图1中,n阶跟踪微分器(tracking differentiator,TD)给出了参考输入v的各阶导数跟踪信号e1,e2,…,en。n+1阶扩张状态观测器(extended state observer,ESO)估计出对象的各阶状态变量 z1,z2,…,zn和对象总扰动的实时作用量zn+1。非线性状态误差反馈(non-linear state error feedback,NLSEF)利用TD输出和ESO输出的误差输出被控对象所需的控制量,并对扰动量进行补偿。
ADRC实现过程如下:
1)跟踪微分器
该微分器用于实现对系统输入信号的快速无超调跟踪,同时能给出良好的微分信号,其表达式为
其中:e为误差信号;α为可调参数;δ为滤波因子,表示fal(e,α,δ)函数的线性段长度。
2)扩张状态观测器
该观测器可对系统的状态和扰动进行估计并加以补偿,从而增强系统的鲁棒性其表达式为

3)非线性状态误差反馈
ADRC采用非线性反馈控制代替线性加权组合的PID控制,能够获得更好的控制性能,其表达式为

4)参数选定规则
ADRC参数调整方法一般分为2步:一是把TD、ESO和NLSEF看成独立的3个部分,分步整定;二是结合NLSEF对ADRC进行整体参数协调整定。依照上述原则整定参数后的ADRC,可保证具有较强的鲁棒性[9,15]。
2 BESS建模及ADRC控制器设计
2.1 BESS数学建模
BESS主要包括锂电池(battery)和并网变换器(power conversion system,PCS)两部分:其中,前者提供能量,后者传递能量。图2为电池储能系统结构示意图。

图2 锂电池储能系统结构简图Fig.2 Diagram of li-battery energy storage system
图 2 中,udc、idc分别为直流侧电压、电流;ia、ib、ic表示变流器输出侧三相电流,iga、igb、igc为三相并网电流,ua、ub、uc及 ea、eb、ec分别为 PCS 输出侧三相电压和变压器低压侧三相电压;LT、C0分别表示变压器等效电感以及直流侧支撑电容;L1、C1、R1分别表示交流滤波器的电感、电容和阻尼电阻。R为电感等效电阻,K为变压器高压侧与低压侧额定电压之比。
若忽略阻尼电阻以及IGBT开闭等损耗,并假设隔离变压器具有理想特性,则可将其等效为电感。
定义开关脉冲函数sk为

式中,k=a、b、c。PCS 正常工作时,上、下桥臂有且仅有一个开关开通。
根据图2,在dq0坐标系下,采用等量变换,在忽略PCS桥路自身损耗并假设PCS交流侧功率与桥路直流侧功率相平衡的前提下,则可建立BESS的数学模型为

其中:L=LT+L1;ed、id、sd和 eq、iq、sq分别表示 d 轴、q轴的交流电网电压、变流器输出电流和开关函数。ω为交流电网的角频率。
从BESS的数学模型可以看出,在dq0坐标系下采用电流直接控制的BESS是一个典型的开关非线性、时变、强耦合系统,且系统等效电感参数L难以精确测量,如此则给BESS控制系统的设计带来了挑战。
(a)Minimize dispraise of other(b)Maximize praise of other
2.2 BESS的ADRC控制器一般设计方法
为提高BESS控制性能,结合其数学模型,设计ADRC控制器如下:
1)模型规范化
为便于设计,首先将式(7)表示的BESS数学模型按照式(1)进行规范化处理为

由式(8)可知,受控系统为一阶系统,故可采用一阶自抗扰控制器。从dq0坐标系下的BESS数学模型可以看出,d轴和q轴方程存在对偶关系,故以下仅以交流侧d轴下的自抗扰控制器设计为例(即式(8)中的第一个表达式),进行说明。
2)TD设计
针对一阶系统,采用一阶微分跟踪器,控制规律为

式中,r0,α0,δ0均为待定可调参数。
3)ESO设计

式中,α1,δ1,β1,β2等都是待调参数。
4)NLSFE设计
NLSEF将广义误差e1作为输入,并考虑系统扰动补偿,控制方程为

式中:r2,α2,δ2等都是待调参数;ud是最终控制变量。
3 BESS充放电的双闭环ADRC控制方案
BESS的核心功能是实现能量双向传递,本质是整流充电和逆变放电。为实现电池储能系统恒压、恒流充电和指定功率放电的功能,且提高其在电网电压波动、参考值突变以及系统参数改变等情况下的抗扰动能力,在同步旋转坐标系下,设计了BESS双闭环自抗扰控制策略,控制框图如图3所示。

图3 BESS控制框图Fig.3 Diagram of BESS control
图3控制框图中,主要包含电气量量测、坐标变换以及外环和内环控制器等环节。其中,外环和内环控制器均是采用自抗扰技术设计,具体介绍如3.1~3.2节所述。
3.1 外环ADRC控制器
外环控制器主要用于实现控制目标,并产生内环控制所需参考信号。外环控制器如图4所示。

图4 BESS外环控制器Fig.4 Outer-loop controller of BESS
图4中,电池充电时,采用恒流或者恒压方式,将设定值与实际值的偏差通过ADRC控制器产生控制信号idref,iqref,使其能够快速响应参考值突变以及量测值扰动等情况,从而准确地跟踪参考电流或电压。放电时,为简化控制环节,采用基于瞬时功率理论的功率解耦控制,直接获取作用于内环的参考信号。
3.2 内环ADRC控制器
内环控制器主要进行精细调节,用于提高BESS输出的电能质量和动态响应性能,其控制框图如图5所示。
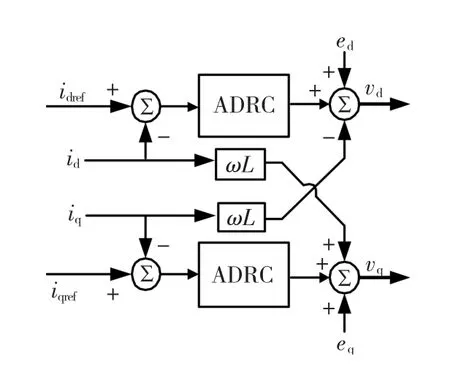
图5 BESS的内环控制器Fig.5 Inner-loop controller of BESS
图5中,内环控制器采用基于ADRC的前馈解耦控制,即将三相瞬时电流iabc经Park变换后的dq轴分量id,iq分别与外环控制器输出的“参考信号”idref,iqref比较得到的误差作为ADRC控制器输入,然后通过电压前馈补偿和交叉耦合补偿,输出电压控制信号vd与vq。
基于ADRC设计的内环控制器,可减小电压、电流采样误差(扰动)、电网电压突变以及系统电感参数不精确等对系统控制的影响,有效地提高控制效果。
4 仿真分析
为验证本文所提方法的正确性和可行性,采用PSCAD/EMTDC软件搭建BESS仿真平台,并对比分析采用ADRC和传统PI控制的控制性能。表1给出了BESS仿真分析相关参数。

表1 BESS仿真分析相关参数Table 1 Relative parameters of BESS
此外,ADRC控制器参数均整定为:r0=5 000,α0=0.55,α1=0.4,β1=8 100,β2=12 000,α2=0.6,r2=450,δ1=δ2= δ3=0.001。传统 PI控制外环控制器参数为:KP1=2,KI1=500;内环控制器参数为:KP2=1,KI2=2 500。
根据BESS控制性能要求,分别采用ADRC和传统PI控制对各种工况下的充电、放电模式进行仿真,以检验BESS的稳态性能以及其抵抗外界扰动的能力。
4.1 BESS充电
电池储能系统的充电过程主要考虑恒压充电和恒流充电两种运行模式。
4.1.1 恒压充电
工况1:设定充电电压为550 V;在0.1 s时刻,假设电网电压下降至0.9 pu,持续时间20 ms。此时,采用恒压充电策略的直流侧电压波形如图6所示。

图6 电网电压暂降时直流侧电压波形Fig.6 DC Voltage wave under grid voltage sag
图6可以看出,在控制启动至达到稳定阶段,ADRC需15 ms,PI控制需50 ms;扰动发生后,ADRC经过约20 ms就恢复稳态,且电压跌落量小;PI控制电压跌落大,且需要约50 ms才能恢复稳态,控制器跟随性能较差。
工况2:在0~0.1 s,设定充电电压为550 V;0.1~0.2 s,设定充电电压为530 V。此时,直流侧电压波形如图7所示。

图7 充电电压给定突降时直流侧电压波形Fig.7 DC voltage wave with down-step change of DC voltage reference
图7表明,当充电电压参考值突降时,ADRC可以很快响应此扰动,直流侧电压平滑地降低至新设定的参考电压(“软着陆”过程);而PI控制则经历了一个“超量下降”过程:电压跌落至参考电压之下,之后再升至参设定值。
工况3:在0~0.2 s,设定充电电压为530 V;将模型中电感参数由实际值0.4 mH改为0.65 mH,以模拟实际运行中可能存在的参数摄动对控制的影响。如此,两种控制方法下的直流侧电压波形如图8所示。

图8 电感值变化后直流侧电压波形(0.65 mH)Fig.8 DC voltage wave with a changed inductance value(0.65 mH)
图8反映了系统电感参数发生变化后,传统PI控制出现了超调和周期性衰减的过程,达到稳态时间约100 ms,相比图7中0.1~0.2 s阶段,控制效果变差;而采用ADRC虽然也出现了电压波动现象,但波动较小,且很快就恢复至稳态(约40 ms),说明ADRC具有较强的参数适应能力。
4.1.2 恒流充电
工况1:设定充电电流为20 A;在0.1时刻,假设电网电压升高至1.1 pu,持续时间20 ms。此时,直流侧电流波形如图9所示。

图9 电网电压暂升时直流侧电流波形Fig.9 DC current wave under grid voltage swell
从图9可以看出,恒流充电稳态时,ADRC响应速度明显快于PI控制,且直流电流抖动小。当外界发生扰动后,ADRC虽也经历了一个调整适应的过程,但25 ms以内就恢复正常;而PI控制遇到扰动后,出现了超调和周期性波动现象,50 ms后才恢复稳态。
工况2:在0~0.1 s,设定充电电流为10 A;0.1~0.2 s,设定充电电流为20 A。结果如图10所示。

图10 充电电流给定突增时直流侧电流波形Fig.10 DC current wave with up-step change of DC current reference
图10为给定充电电流突增时的直流电流波形。在给定值突变时刻,ADRC能迅速感知并软启动至新设的参考值(约10 ms);而PI控制未能承受参考值突变的扰动,控制量先下调后再“缓慢”升至参考值(约50 ms)。
从图6~图10的分析可知,充电情况下,ADRC相对传统PI控制,对于直流侧电压/电流的控制性能更为优越,主要体现在:
1)响应速度快,超调量小;
2)稳态时,电压或电流的波动小;
3)抵抗外界扰动的能力强。
4.2 BESS放电
BESS放电主要体现其与电网的功率交互,故采用指定功率的放电模式。
仿真工况:在0~0.1 s,设定有功放电功率为15 kW;在0.1~0.2 s,有功放电功率设为35 kW。无功功率均设为0。规定电流从BESS流向电网为正方向。为方便对比,特将图11中PI控制获得的功率曲线向上平移3个单位,如图11所示。

图11 放电功率给定突变时功率曲线Fig.11 Power cure with step change of power reference
图11表明,采用PI控制,稳态时的功率波动较大,出现较多尖峰和毛刺;当给定功率值突变时,PI控制虽能快速响应,却出现较大冲击,存在“超调”和“响应”的矛盾。而ADRC不存在上述问题,超调小、响应快,功率曲线波动小。
图12~图13分别展示了上述工况放电时,PI控制和自抗扰控制得到的A相交流侧电压、电流波形。

图12 放电功率给定突变时交流侧A相电压/电流波形-PI控制Fig.12 AC voltage and current wave with step change of power reference-PI control

图13 放电功率给定突变时交流侧A相电压/电流波形-ADRCFig.13 AC voltage and current wave with step change of power reference-ADRC
分析图12、图13可知,放电情况下:PI控制时,交流侧电流存在较多纹波和畸变(尤其在给定值变化时刻附近);而自抗扰控制得到的交流电流波形更加平滑,谐波含量更少。
5 结论
鉴于自抗扰控制技术具有良好的控制性能,本文在建立电池储能系统数学模型的基础上,设计了其双闭环自抗扰充放电控制策略。PSCAD/EMTDC仿真结果表明,与传统PI控制相比,采用本文控制方案主要具有如下优势:
1)自抗扰控制技术很好地解决了锂电池储能系统在非线性、时变、耦合特性以及不确定干扰下的控制设计问题,所设计的双闭环自抗扰控制器具有优良的动态响应性能。
2)当受到外界扰动时(如电网电压波动、参数设定值突变、系统参数改变等),电池储能系统在双闭环自抗扰控制下仍能保持良好的控制性能,具有较好的鲁棒性。
值得说明的是,本文提出的BESS自抗扰控制策略主要适用于电压对称情况。对于三相电压不平衡及故障条件下的BESS控制研究,将是今后的工作重点。
[1] SPAGNUOLO G,PETRONE G,ARAU'JO S V,et al.Renewable energy operation and conversion schemes:A summary of discussions during the seminar on renewable energy systems[J].Industrial Electronics Magazine,2010,4(1):38 -51.
[2] BARTON J P,INFIELD D G.Energy storage and its use with intermittent renewable energy[J].IEEE Transactions on Energy Conversion,2004,19(2):441-448.
[3] 丁明,陈忠,苏建徽,等.可再生能源发电中的电池储能系统综述[J].电力系统自动化,2013,37(1):19-26,102.
DING Ming,CHEN Zhong,SU Jianhui,et al.An overview of battery energy storage system for renewable energy generation[J].Automation of Electric Power Systems,2013,37(1):19 -26,102.
[4] 彭思敏,曹云峰,蔡旭.大型蓄电池储能系统接入微电网方式及控制策略[J].电力系统自动化,2012,35(16):38 -43.
PENG Simin,CAO Yunfeng,CAI Xu.Control of large scale battery energy storage system interface to microgrid[J].Automation of Electric Power Systems,2012,35(16):38 -43.
[5] 侯朝勇,胡学浩,惠东.全数字控制的锂电池储能并网系统的设计与实现[J].电力自动化设备,2012,32(3):125 -130.
HOU Chaoyong,HU Xuehao,HUI Dong.Design and implementation of grid-connected lithium battery energy storage system under total digital control[J].Electric Power Automation Equipment,2012,32(3):125-130.
[6] CHEN Boyuan,LAI Enshin.New digital-controlled technique for battery charger with constant current and voltage control without current feedback[J].IEEE Transactions on Industrial Electronics,2012,59(3):1545-1553.
[7] 梅生伟,申铁龙,刘康志.现代鲁棒控制理论与应用[M].第2版.北京:清华大学出版社,2008.
[8] 梅生伟,刘锋,薛安成.电力系统暂态分析中的半张量积方法[M].北京:清华大学出版社,2010.
[9] 韩京清.自抗扰控制技术——估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[10] 黄本润,夏立,吴正国.自抗扰控制器在动态电压恢复器中的应用[J].电机与控制学报,2012,16(6):106 -110.
HUANG Benrun,XIA Li,WU Zhengguo.Active disturbance rejection controller for dynamic voltage restorer[J].Electrical Machines and Control,2012,16(6):106 -110.
[11] 唐杰,王跃球,刘丽.配电网静止同步补偿器的自抗扰控制[J].电网技术,2012,36(1):153 -157.
TANG Jie,WANG Yueqiu,LIU Li.Active disturbance rejection control for distribution static synchronous compensator[J].Power System Technology,2012,36(1):153-157.
[12] 张淼,刘立强.光伏三相并网系统的自抗扰控制[J].控制理论与应用,2008,25(1):175 -177.
ZHANG Miao,LIU Liqiang.Disturbance rejection controller for photovoltaic three-phase-grid-connected system[J].Control Theory and Applications,2008,25(1):175 -177.
[13] 夏安俊,胡书举,许洪华.大型风电机组自抗扰转速控制[J].电机与控制学报,2012,16(9):33 -38.
XIA Anjun,HU Shuju,XU Honghua.Speed control of large scale wind turbines based onactive disturbance rejection control[J].Electrical machines and control,2012,16(9):33 -38.
[14] SUN Dong.Comments on active disturbance rejection control[J].Industrial Electronics Magazine,2007,54(6):3428-3429.
[15] 郭源博,周鑫,张晓华,等.三相电压型脉宽调制整流器的自抗扰控制[J].电力系统自动化,2011,35(16):87 -93.GUO Yuanbo,ZHOU Xin,ZHANG Xiaohua,et al.Auto-disturbance rejection control for three-phase voltage-type PWM rectifier[J].Automation of Electric Power Systems,2011,35(16):87-93.
[16] HAN Jingqing.From PID to active disturbance rejection control[J].IEEE Transactions on Power Electronics,2009,56(3):900-906.
(编辑:刘琳琳)
Double-closed-loop active disturbance rejection control design for the charging/discharging of lithium-battery energy storage system
ZHENG Tian-wen1, LIU Feng1, XIAO Xian-yong2, ZHOU Ye-ru3, MEI Sheng-wei1
(1.State Key Lab of Power System,Department of Electrical Engineering,Tsinghua University,Beijing 100084,China;
2.School of Electrical and Information,Sichuan University,Chengdu 610065,China;3.Xuancheng Power Supply Company,Xuancheng 242000,China)
Lithium-battery energy storage system(BESS)is characterized by nonlinearity,time varying and strong coupling,greatly challenging the control system design,especially when model inaccuracy and external disturbances are taken account in.Suggests designing the charging/discharging control of BESS based on the active disturbance rejection control(ADRC)technique.First,establishing the ADRC model of BESS;Then,proposing the general methodology of ADRC design for BESS;At last,providing a double-closed-loop ADRC control strategy for the charging and discharging of BESS.And comparing the performances of the conventional PI control and the proposed ADRC control by carrying simulations on PSCAD/EMTDC platform.Simulation results manifest that the proposed double-closed-loop ADRC control endows BESS better dynamic performance and stronger ability to attenuate disturbances under different conditions,such as variation of charging voltage,charging current or system parameters.
lithium-battery energy storage system(BESS);charging/discharging control;active disturbance rejective control(ADRC);uncertain disturbances
TM 73,TM 91
A
1007-449X(2013)11-0020-08
2013-03-20
国家电网公司重点科技项目(5212G0120005);国家自然科学基金(51007041);国家高技术研究发展计划(“863”计划)(2012AA050204)
郑天文(1987—),男,博士研究生,研究方向为新能源发电系统及其控制技术;
刘 锋(1977—),男,副教授,研究方向为电力系统稳定和控制;
肖先勇(1968—),男,教授,博士生导师,研究方向为电能质量、智能电网的教学和研究工作;
周业如(1956—),男,高级工程师,宣城供电公司信息中心主任,研究方向为电力通讯技术;
梅生伟(1964—),男,教授,博士生导师,研究方向为电力系统非线性控制、复杂系统理论和应用。
梅生伟
猜你喜欢
数学物理学报(2022年4期)2022-08-22
宁夏电力(2022年1期)2022-04-29
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
数学物理学报(2019年4期)2019-10-10
通信电源技术(2018年3期)2018-06-26
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
贵州师范学院学报(2016年3期)2016-12-01
电源技术(2015年11期)2015-08-22