便携卫星天线精确定位研究
2013-02-01 02:33王民冉莉
中国科技信息 2013年7期
王 民 冉 莉
南京中网卫星通信股份有限公司,江苏南京 210032
便携卫星天线精确定位研究
王 民 冉 莉
南京中网卫星通信股份有限公司,江苏南京 210032
便携卫星天线能否迅速准确地对星是便携应急通信系统中的关键技术,传统的方法难于同时解决对星系统的实时性和准确性,提出了以空间坐标变换的理论来求解卫星在天线载体坐标系下的位置角度,并运用基于IGRF和GPS的磁偏角计算方法,来修正天线航向角。实际应用证明,该方法能够提高对星的速度和准确度,具有很好的可行性。
空间坐标变换;国际地磁参考场(IGRF);磁偏角修正;天线三大角度
引言
为了应对诸如森林火险、消防安全、电视转播等突发事件中的应急通信,机动、灵活的卫星通信系统不可或缺,便携卫星通信将是理想的选择。为保证通信单元的工作,首先卫星天线要能快速、准确的对准所需卫星。所以对便携卫星天线精确定位的研究有非常重要的意义。
本文提出基于空间坐标变换的理论,及运用基于IGRF和GPS的磁偏角计算方法修正到、天线初始航向角。使天线定位更加快速、准确。
1 天线三大理论角
由GPS测得天线所在地的经纬度后,天线的方位角、俯仰角和极化角可由以下经验公式求得[1]:
天线方位角计算公式是:

上述公式中的Ψs为卫星的经度,Ψg是天线所在地的经度,θ是天线所在地的纬度,所计算出的方位
角是以正南方向为基准的。
公式(1-1)计算出的A>0,则天线的指向为南偏东;A<0,则天线的指向为南偏西。地理坐标系下的天线方位角为:

2 空间坐标变换
2.1 天线对星转角问题
由于应急通信车不可能总是停在水平面上,所以天线所在平面与水平地面存在不固定的夹角。使用上面所计算出的方位角、俯仰角、极化角,来控制天线就不一定能对准所需的卫星。如果能把卫星的上述3个角度转化为相对天线所在平面的角度,那么就很容易控制天线转到卫星所在位置,下面详细探讨了以空间坐标变换的方法来计算卫星在天线载体坐标系下的位置角度。
2.2 载体坐标系下的卫星天线方位角、俯仰角
针对上述2.1问题为了准确对星,必须要把地理坐标系变换到载体坐标系上。天线底座固连在载体上,所以选择载体坐标系为:天线展开时的正前方为X轴的正向,垂直于天线底座上方为Z轴正向,以Z轴为转轴,按右手法则确定Y轴方向。
地理坐标系到载体坐标系的空间变换可分解3次旋转变换(旋转过程遵循右手法则)[2]。首先地理坐标系绕Zg轴旋转εz角,使地理坐标系的Xg轴和载体坐标系的XC重合,再绕地理坐标系的Xg轴旋转εx角,使地理坐标系的Yg轴与载体坐标系的Yc轴重合,最后,绕地理坐标系的Yg轴旋转εy角,使地理坐标系的Zg轴和载体坐标系的Zc轴重合。
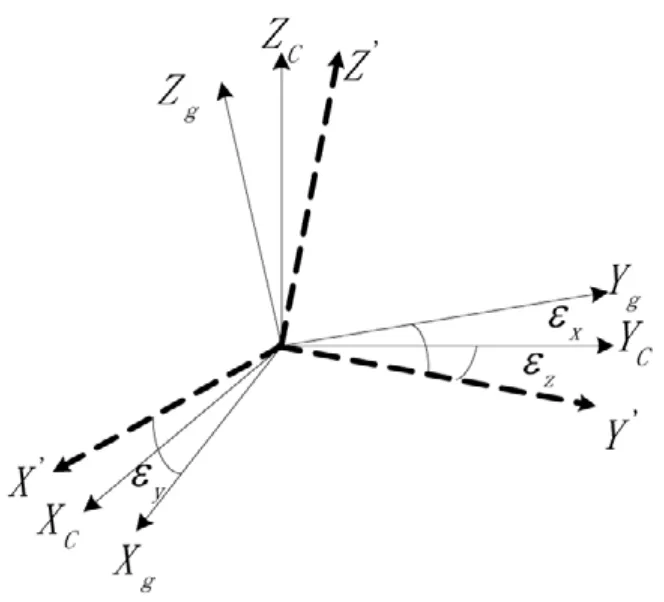
图3 坐标旋转示意图
地理坐标系到载体坐标系的变换矩阵:

若地理坐标系下坐标(Xg,Yg,Zg),载体坐标系下同一点的坐标为(X,Y,Z)则得到

3 基于IGRF和GPS的磁偏角修正
针对磁偏角对电子罗盘航向角测量的影响,给出基于IGRF和GPS的磁偏角计算方法。
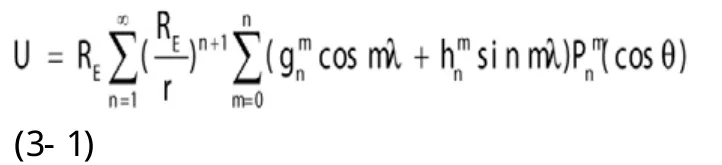
国际地磁参考场IGRF是国际地磁和高空物理协会于1970年制定的国际统一地磁模型。该模型基于高斯提出的理论,用球谐级数表示地磁基本场。IGRF是一张数表,包括球谐级数系数和系数年变化率,表上的参数为不同国家提出四种模型系数的加权平均值,每5年根据最新的测磁数据做一次更新。应用时,根据当前时间和系数年变化率求出当前时刻的级数系数,再把当前地点的经度、纬度和高度一同代入球谐级数,即可以求出该时该地的地磁偏角。
IGRF将地球上某一点Q处的磁位U表示为如下的球谐级数[3-4]:

将Q点的磁位U对相应的坐标微分,可求得沿坐标轴x、y和z的场强分量如下[5]:

其中经度、纬度和高度由GPS获得。

4 结语
便携卫星天线的准确对星是便携应急通信系统中的关键一环,本文对便携卫星天线自动对星系统中的关键点进行了探讨,提出了以空间坐标变换的理论来求解卫星在天线载体坐标系下的位置角度,和基于IGRF和GPS的磁偏角计算方法,来修正天线航向角,提高了对星的速度和准确度。通过试验测试,运用该理论方法完全可以精确对准所需卫星。
[1]王秉钧等.现代卫星通信系统[M].北京:电子工业出版社,2004
[2]朱华统,杨元喜,吕志平.GPS坐标系统的变换[M].北京:测绘出版社出版,1994
TP301.6
A
10.3969/j.issn.1001-8972.2013.07.044
王民(1978-).男,河南驻马店人,南京中网卫星通信股份有限公司,研究方向为控制理论与控制工程。
猜你喜欢
结构工程师(2022年2期)2022-07-15
卫星应用(2022年1期)2022-03-09
卫星应用(2021年11期)2022-01-19
河北省科学院学报(2020年1期)2020-05-25
空间科学学报(2020年4期)2020-04-22
科技传播(2019年22期)2020-01-14
现代计算机(2018年19期)2018-08-01
北京航空航天大学学报(2017年5期)2017-11-23
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
移动信息(2016年9期)2016-12-31