
基于MoG-HMM的齿轮箱状态识别与剩余使用寿命预测研究
2013-01-25 00:43张星辉康建设高存明曹端超滕红智
振动与冲击 2013年15期
张星辉,康建设,高存明,曹端超,滕红智
(1.军械工程学院,石家庄 050003;2.68262部队,青铜峡 751601;3.68129部队,兰州 730060)
基于MoG-HMM的齿轮箱状态识别与剩余使用寿命预测研究
张星辉1,康建设1,高存明2,曹端超1,滕红智3
(1.军械工程学院,石家庄 050003;2.68262部队,青铜峡 751601;3.68129部队,兰州 730060)
提出了基于混合高斯隐马尔可夫模型的齿轮箱状态识别与剩余使用寿命预测新方法。建立了基于聚类评价指标的状态数优化方法,通过计算待识别特征向量的概率值来识别齿轮箱当前状态。在状态识别的基础上,提出了剩余使用寿命计算方法。最后,利用齿轮箱全寿命实验数据进行验证,结果表明,该方法可以有效的识别齿轮箱状态并实现了剩余使用寿命预测,平均预测正确率为90.94%,为齿轮箱的健康管理提供了科学依据。
混合高斯隐马尔可夫模型;剩余使用寿命预测;状态识别
有效的状态识别和剩余使用寿命(Remaining Useful Life,RUL)预测是设备健康管理的关键步骤。设备的大多数故障都是从正常到失效缓慢退化的过程,这些状态变化(磨损、裂纹等)由于受到机械构造的限制,一般不便直接测量,但可通过外部测量设备来确定其内部状态的变化。由于测量设备本身误差及噪声的影响,使得测量结果具有一定的随机性,与设备内部状态的关联关系变得复杂。这种由设备外部测量结果反映内部状态变化的过程是一种双重随机过程。其与隐马尔可夫模型(Hidden Markov Model,HMM)的建模过程一致。目前,HMM在故障诊断领域已有很多成功的案例[1-3]。但多数文献只对不同故障模式进行故障诊断,对全寿命退化过程不同退化状态识别研究较少。腾红智等[4]应用连续隐马尔可夫模型(Continuous Hidden Markov Model,CHMM)对齿轮箱全寿命过程不同状态的识别进行了研究。其应用K均值聚类算法和交叉验证思想相结合对状态数进行了优化。该方法针对不同的状态数目都要进行分类错误率的计算,计算过程繁琐。而一些聚类方法验证指标(如分割系数等)则能够简便快速确定最优状态数,可以进一步提升运算效率。混合高斯隐马尔可夫模型(Mixture of Gaussians Hidden Markov Model,MoG-HMM),允许隐状态以多高斯分布产生观测值,相比单个高斯分布而言更能合理的表达外部观测与内部状态之间复杂的关联关系。为此,本文研究了基于MoG-HMM的状态识别与RUL预测方法,并将其应用于齿轮箱全寿命过程的退化状态识别和RUL预测,实验结果证明了该方法的有效性。
1 MoG-HMM基本原理
MoG-HMM是HMM的其中一种形式,该模型是一个双重随机过程。其中一个随机过程描述隐状态之间的概率转移关系;另一个随机过程描述隐状态产生观测值的概率关系。一个MoG-HMM可以由下列参数描述:
(1)K:模型中的隐状态数。其状态分别为1,2,…,K,t时刻的状态表示为st;
(2)A:状态转移概率矩阵,A=aij,aij=P[st+1=j
因此,可以记 MoG-HMM 为:λ =(K,A,B,π)。
2 基于MoG-HMM的状态识别与RUL预测
设备从正常到失效要经历一系列不同的退化状态,状态之间具有一定的转移关系。其和MoG-HMM的建模过程一致。利用MoG-HMM对设备退化过程实施状态识别和RUL预测包括三个关键步骤:确定退化状态数目、状态识别和RUL预测。
2.1 退化状态数目优化
设备退化状态数目的确定是利用MoG-HMM进行状态识别和剩余使用寿命预测的前提。多数文献都是靠经验来确定退化状态数目。Dong等[5]根据油液的污染度将泵轴承分为四个退化状态。文献[6]在应用HMM预测时,假设设备的退化状态数目为2(好和坏)。退化状态数目的确定大致可以分为三种方法:一是由专家根据经验确定;二是利用交叉验证思想以分类器的分类错误率最低来确定;三是应用聚类方法评价指标确定。由于设备的构造越来越复杂,由专家根据经验来确定退化状态数目缺乏通用性,且需要大量的实验,对于高可靠、价格昂贵的部件并不适用。利用交叉验证的思想确定最优退化状态数目需要对不同的退化状态数目都训练分类器并检验分类错误率,其计算时间长,效率低。而应用聚类方法评价指标确定最优退化状态数目则简便易行,计算效率高。
首先,假设聚类数目(退化状态数目)为c,c∈{2,3,…,cmax}。选择一种聚类方法将提取的特征矩阵分为c类,计算各个聚类评价指标的值,每个c值都有一组评价指标值相对应,由此可以确定最优的c值。其过程如图1所示。
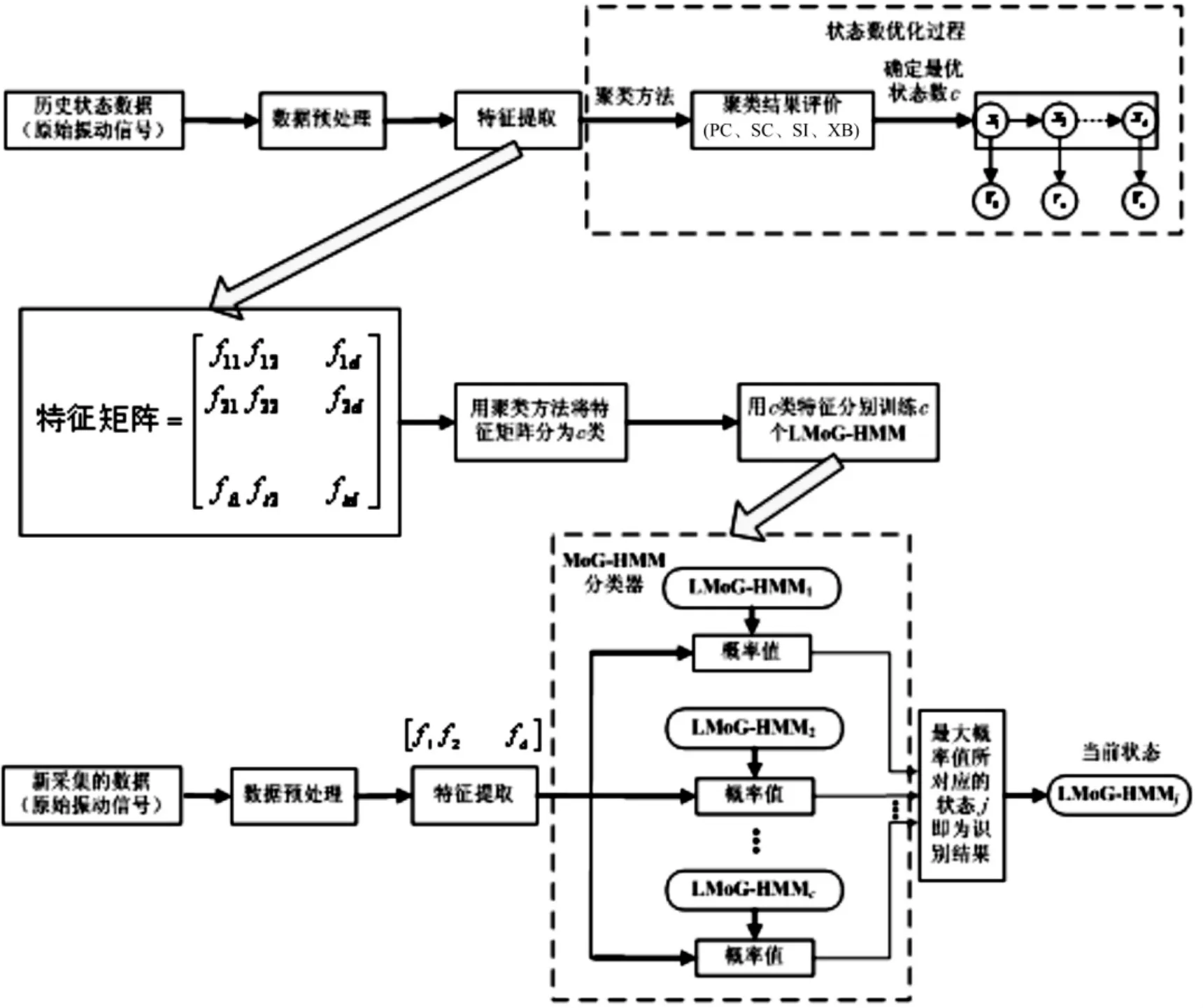
图1 基于LMoG-HMM的退化状态识别框架Fig.1 Framework of degradation state recognition based on LMoG-HMM
聚类方法评价指标分别为:
分割系数[7](Partition Coefficient,PC),其定义为:
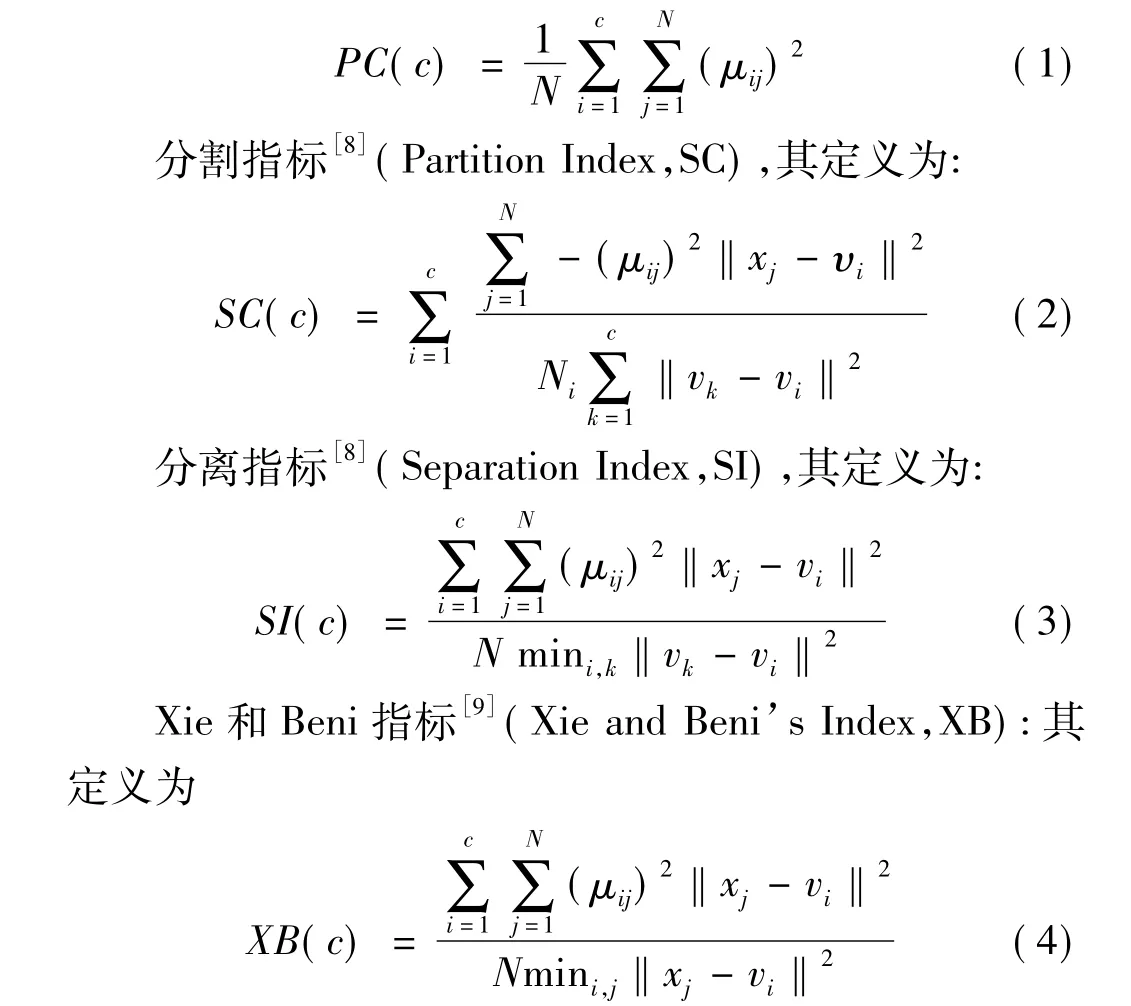
以上表达式中μij表示第j个样本属于第i类的概率,xj表示第j个样本,vi表示第i类的聚类中心,vk表示第k类的聚类中心,1≤i,k≤c,c表示聚类数目,N 表示样本数目。其中,PC取值越大越好,SC、SI和XB取值越小越好。
2.2 基于MoG-HMM的退化状态识别
该方法包括两个阶段:训练和识别,其过程如图1所示。假设从历史状态数据中提取的特征矩阵为F,F=(ft1,ft2,…,ftn),1≤t≤T,1≤d≤D。T 为设备失效时间,D为提取的特征数。用某聚类方法将特征矩阵F分为c类,用该c类特征分别训练c个MoG-HMM,因其隐状态并不代表设备的退化过程,因此称为局部混合高斯隐马尔可夫模型(Local Mixture of Gaussians Hidden Markov Model,LMoG-HMM)。当获取新的特征向量O时,就可以分别计算c个LMoG-HMM分别产生O的概率概率值最大的 LMoG-HMM所对应的退化状态即为当前所处的退化状态。如图2所示,当新的设备从正常状态开始退化时,将从监测信号中提取的特征向量不断的输入用历史数据训练好的LMoG-HMM分类器中,由概率最大原则来判断该时刻设备所处的退化状态,直到设备再次失效。由此确定出该设备的退化状态序列 H=((si)1,(si)2,…,(sj)t),1≤i,j≤K,1≤t≤T。i为初始退化状态,j为 t(当前)时刻退化状态。该退化过程和观测矩阵又可以用一个MoG-HMM表示,称为全局混合高斯输出隐马尔可夫模型(Global Mixture of Gaussians Hidden Markov Model,GMoG-HMM)。
2.3 基于MoG-HMM的剩余使用寿命预测
当获得退化状态序列H后,通过求取退化状态信息即可进行RUL预测。往往同型号的多个设备其退化过程也不尽相同,当其退化量超过某一预先确定的阈值时,设备失效。对其进行RUL预测,也就是预测从当前退化量到达退化量阈值所需的时间。通常,设备真实的退化量是无法测量的。因此,在实际计算过程中,可以从提取的特征向量中,选取全寿命过程中某一特征作为设备退化量的度量。
定义如下退化状态信息:
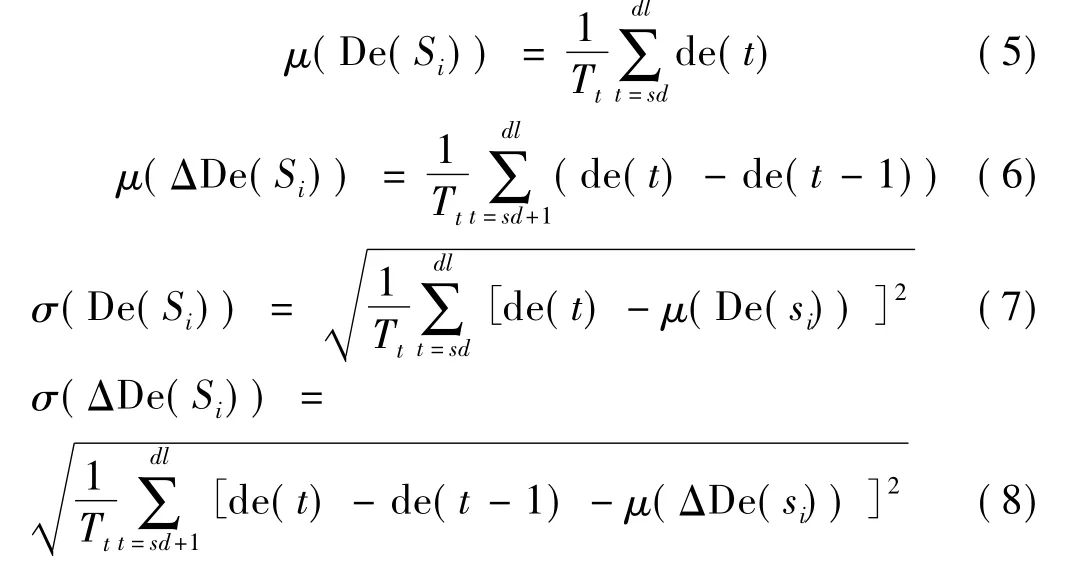
其中:De(Si)表示设备处于退化状态Si时每个时间点的退化量,de(t)表示t时刻时的退化量。Sd表示退化状态Si开始时间,dl表示退化状态Si结束时间。Tt=dl-sd+1。用来预测的GMoG-HMM模型可以进一步表示为:

μ(De(Si))和μ(ΔDe(Si))表示退化状态i每个时间点的平均退化量和平均退化量变化。σ(De(Si))和σ(ΔDe(Si))表示退化状态Si每个时间点退化量的标准差和退化量变化的标准差。退化状态序列H和退化信息 μ(De(Si))、μ(ΔDe(Si))、σ(De(Si))与σ(ΔDe(Si))可以估计用于RUL预测的退化向量。其主要思想是结合置信度估计t时刻的平均退化量和变化范围。其可以表示为式(9)~(11)。
t时刻的退化量可以表示为:



RUL的值即可表示为退化量阈值Dlimit与现有退化量的差值。




图2 全寿命过程退化状态识别Fig.2 Degradation state recognition of full life cycle
3 实验及数据分析
3.1 实验设置
实验设备如图3所示,实验所用齿轮箱型号为JZQ175;动力源为电磁调速电机,型号为YCT180-4A;风冷磁粉制动器为齿轮箱提供载荷,型号为FZ200.K/F。齿轮箱结构及传感器位置如图4所示。该实验为全寿命实验,为缩短实验时间,齿轮箱传递功率为额定功率的2~2.5 倍,转速为1 200 r/min,输入端负载为15 N·m,采样频率为20 kHz,采样时间为6 s,每10 min采集1组数据。实验发现,齿轮箱工作548 h后失效,主要故障形式是齿面严重磨损和断齿,如图5和6所示。

图3 实验台示意图Fig.3 Test-rig of gearbox

图4 齿轮箱主要参数及传感器位置Fig.4 Main parameters of the gearbox and the transducers location
实验采集的是加速度信号,共3 288组数据。用‘db8’小波分别对四个通道的振动信号进行小波包3层分解,提取各频带能量作为特征向量。因此,四个通道共32个特征,特征矩阵F的维数为3 288×32。
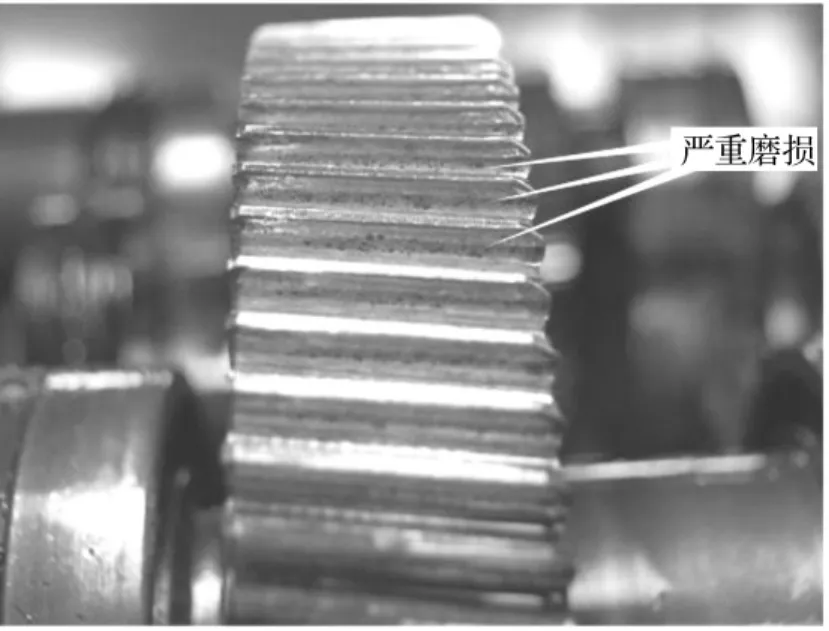
图5 齿轮箱实验中期1号齿轮严重磨损Fig.5 Serious wear of gear 1 at the middle test time
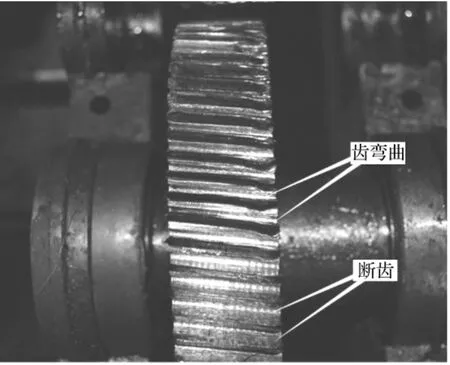
图6 齿轮箱实验后期1号齿轮失效Fig.6 Failure of gear 1 at the later test time
3.2 基于MoG-HMM的状态识别
3.2.1 状态数优化
首先应用K均值聚类算法对特征矩阵F进行聚类,聚类数目取2~7。然后分别计算PC、SC、SI、XB的值。结果如图7所示。从图中可以看出,最佳的聚类数目为3。因此将齿轮箱全寿命过程分为3个退化状态。最后,应用K均值聚类算法将特征矩阵聚为3类,获得类别序号及聚类中心向量。
3.2.2 LMoG-HMM 分类器训练
从第1类中选取类别序号401~450所对应的特征矩阵;从第2类中选取类别序号3091~3130所对应的特征矩阵;从第3类中选取类别序号3279~3288所对应的特征矩阵。3个类别共100组数据用来训练各自的分类器(LMoG-HMM1、LMoG-HMM2、LMoG-HMM3)。分类器的初始参数设置和训练后的参数如表1所示。
3.2.3 齿轮箱全寿命过程状态识别
分类器训练完毕后,即可对新采集的数据进行状态识别,即计算产生观测值概率最大的分类器所对应的退化状态即为齿轮箱所处的退化状态。齿轮箱全寿命过程特征矩阵所对应的三个分类器产生概率如图8所示。图8(a)为全寿命过程状态识别全貌图,图8(b)为全貌图的局部放大。从局部放大图中可以看出,由于受噪声等的影响,局部时间点的退化状态识别结果是错误的。在求取全寿命过程退化状态序列时需要去除异常数据点,可以将错误识别状态更正为实际退化状态。

图7 四种聚类评价指标不同状态数目划分取值Fig.7 Values of the four validity meaxures at thd different cluster number

图8 齿轮箱全寿命状态识别结果Fig.8 State reeognition results of geatbox's full life cycle
3.3 基于MoG-HMM的RUL预测
由于齿轮箱实际的退化量通常是难以测量的,所以以第1通道频带0~1.25 kHz的能量值作为反映退化量的指标。如图9所示。由于数据受采集设备误差、噪声和环境温度变化的影响存在一定的波动,其波动与图8相同。因此需对退化指标进行多项式拟合,多项式阶数为8,以使其稳定增长。然后对其进行归一化处理,使其退化值的范围为[0,1]之间。
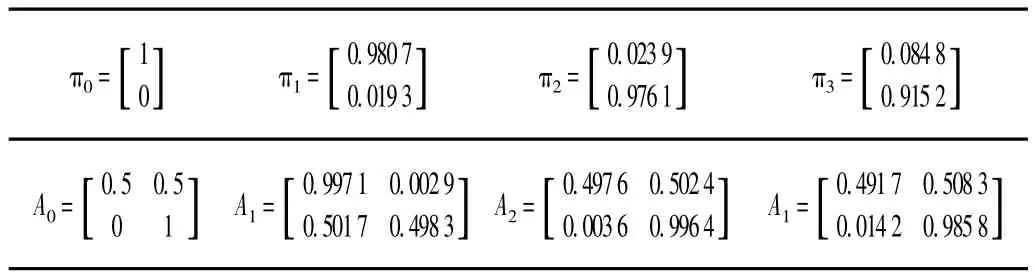
表1LMoG-HMM初始及训练后参数Tab.1 Initialzation and learned parmeters of LMoG-HMM
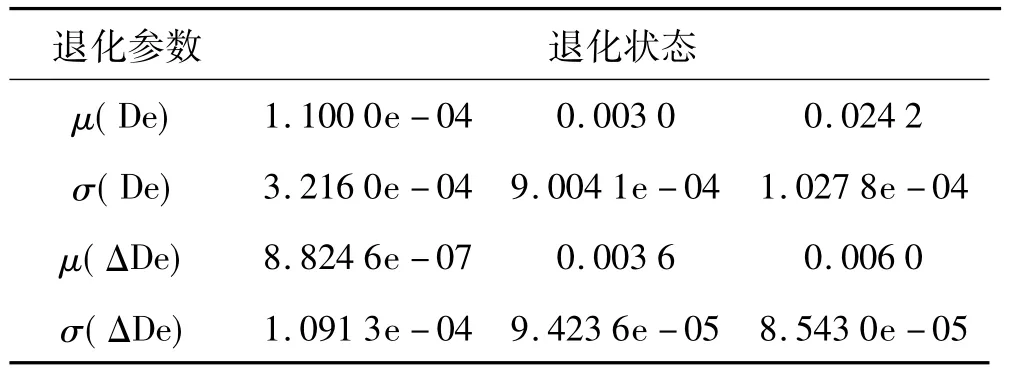
表2 估计的退化参数值Tab.2 Estimated degradation parameters
根据式(5)~(8)可求得退化参数如表2所示。剩余使用寿命计算公式(9)~(11)中的 n·σ表示3Sigma准侧(68%,95%,99.7%)。在该实验中选取n=3。RUL预测正确率计算公式为:

其中:RULR(t)表示 t时刻实际的剩余使用寿命,RULE(t)表示t时刻估计的剩余使用寿命。通过RUL计算公式可以得到其结果如图10所示。由正确率计算公式可以得出其预测平均正确率为90.94%。
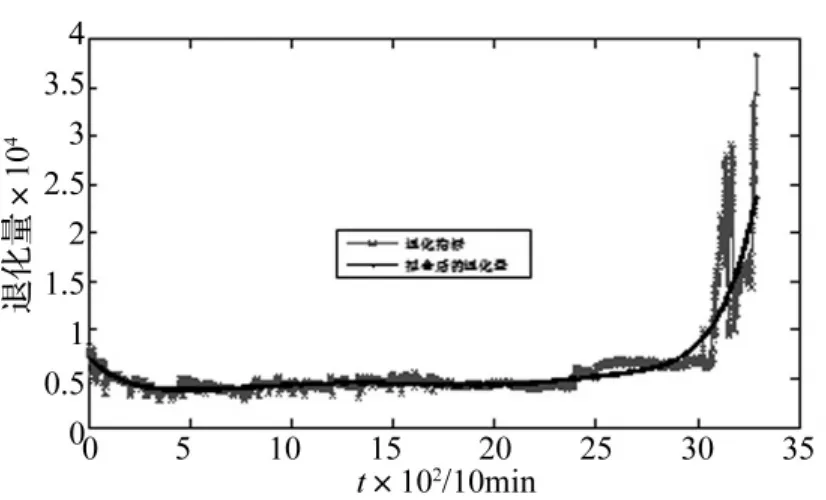
图9 齿轮箱退化量度量指标Fig.9 Degradation measure index of gearbox

图10 齿轮箱RUL预测结果Fig.10 RUL prediction result of Gearbox
4 结论
本文建立了基于MoG-HMM的齿轮箱状态识别和RUL预测方法,建立了基于聚类评价指标的状态数优化方法,相比基于交叉验证的状态数优化方法,其运算速度快,计算简洁。齿轮箱全寿命实验验证了论文所用方法的有效性,平均预测准确率达到了90.94%,为齿轮箱的健康管理提供了科学依据,也为其它类型设备的状态识别和RUL预测提供了借鉴。
[1]Boutros T,Liang M.Detection and diagnosis of bearing and cutting toolfaults using hidden Markov models[J].Mechanical Systems and Signal Processing,2011,25:2102-2124.
[2] Lee J M,Kim S J,Hwang Y,et al.Diagnosis of mechanical fault signals using continuous hidden Markov model[J].Journal of Sound and Vibration,2004,276:1065-1080.
[3] Purushotham V,Narayanan S,Prasad S A N.Multi-fault diagnosis of rolling bearing elements using wavelet analysis and hidden Markov model based fault recognition[J].NDT&E International,2005,38:654 -664.
[4]滕红智,赵建民,贾希胜,等.基于CHMM的齿轮箱状态识别研究[J].振动与冲击,2012,31(5):92-96.
TENG Hong-zhi, ZHAO Jian-min, JIA Xi-sheng, et al.Gearbox state recognition based on continuous hidden Markov model[J].Journal of Vibration and Shock,2012,31(5):92-96.
[5] Dong M,He D.A segmental hidden semi-Markov model(HSMM)-based diagnostics and prognostics framework and methodology[J].Mechanical Systems and Signal Processing,2007,21:2248-2266.
[6] Zhou Z J,Hu C H,Xu D L,et al.A model for real-time failure prognosis based on hidden Markov model and belief rule base[J].European Journal of Operational Research,2010,207:269-283.
[7] Bezdek J C.Pattern recognition with fuzzy objective function algorithms[M].Plenum Press,1981.
[8] Bensaid A M,Hall L O,Bezdek J C,et al.Validity-guided(Re)clustering with applications to image segmentation[J].IEEE Transactions on Fuzzy Systems,1996,4:112 -123.
[9] Xie X L,Beni G.A validity measure for fuzzy clustering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1991,13(8):841-847.
Gearbox state identification and remaining useful life prediction based on MoG-HMM
ZHANG Xing-hui1,KANG Jian-she1,GAO Cun-ming2,CAO Duan-chao1,TENG Hong-zhi3
(1.Ordnance Engineering College,Shijiazhuang 050003,China;2.68262 Unit,Qingtongxia 751601,China;3.68129 Unit,Lanzhou 730060,China)
A new approach for state recognition and remaining useful life(RUL)prediction based on Mixture of Gaussians Hidden Markov Model(MoG-HMM)was presented.The state number optimization method was established based on cluster validity measures.One can recognize the state through identifying the MoG-HMM that best fits the observations.Then,the RUL prediction method was presented on the recognition base.Finally,the data of a gearbox's full life cycle test was used to demonstrate the proposed methods.The results show that the mean accuracy of prediction is 90.94%.
MoG-HMM;remaining useful life prediction;state recognition
TH165.3
A
2012-07-13 修改稿收到日期:2012-08-21
张星辉 男,博士生,讲师,1984年6月生
猜你喜欢
山东冶金(2022年3期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
小猕猴智力画刊(2021年6期)2021-08-05
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年4期)2017-06-22
电子制作(2017年8期)2017-06-05
中国公路(2017年12期)2017-02-06
中国民族医药杂志(2016年5期)2016-05-09
作文大王·低年级(2016年3期)2016-03-11
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27