
数控机床刀架虚拟装配仿真系统的设计与实现
2013-01-06 04:01:26张宇
机械设计与制造工程 2013年5期
张 宇
(天津职业技术师范大学天津市高速切削与精密加工重点实验室,天津 300222)
数控机床刀架虚拟装配仿真系统的设计与实现
张 宇
(天津职业技术师范大学天津市高速切削与精密加工重点实验室,天津 300222)
以LDB4数控机床刀架为例,搭建了可视化交互仿真系统的总体框架,阐述了在 EON开发环境下实现虚拟装配运动仿真的过程以及装配路径的规划方式。以VC++6.0为集成工具,进行了系统界面设计,将各功能模块进行了封装,完成了虚拟装配仿真系统的开发。
虚拟装配;仿真;路径规划
虚拟装配系统以装配对象的三维实体模型为基础,在计算机上对装配操作的全过程进行仿真,真实地模拟和展示产品的相关特性。虚拟装配系统的作用主要有:在设计和制造阶段,可以通过仿真环境优化产品设计,避免或减少产品实际加工中的反复试制或改进;在装配阶段,可以通过虚拟环境模拟装配过程,利用计算机对装配序列、装配路径的规划进行验证和纠错,从而降低装配成本;将虚拟装配与实际装配相结合,创建沉浸、半沉浸的虚拟环境,对于培训和教学而言,可以提高装配操作人员的工作效率[1-2]。
数控机床刀架是数控车床的执行机构,是重要的功能部件,它在一定程度上标志着数控车床的技术水平,并且与加工精度和生产效率密切相关。通过虚拟装配仿真系统可以更加安全、高效地掌握数控机床刀架的工作原理和装拆方法,对于数控机床的检测和故障维修具有重要意义。LDB4数控机床刀架为经济型数控车床电动刀架,在加工制造业具有广泛的应用场合。本文以LDB4数控机床刀架的虚拟仿真为背景,以虚拟装配培训为目标,利用虚拟现实技术原理,为产品装配过程的设计、规划和运动仿真分析构建一个实用的平台。这个系统可通过人机交互的方式,对装配体进行模型展示、装配序列和装配路径的模拟,同时可结合分析验证装配序列的可行性与合理性[3]。
1 系统功能模块及总体框架
1.1 开发环境的选择
EON Studio是一种虚拟现实环境生成工具,可以依据使用者的意图,研发实时3D应用程序。本文选用VC++6.0与EON Studio相结合,进行交互式虚拟装配仿真系统的开发。所设计的数控机床刀架虚拟装配系统,主要应用于教学,系统在满足虚拟装配仿真的基础上,易学易用,操作简便灵活,并具备可拓展的功能。
1.2 系统的构成
构建虚拟仿真系统的主要任务是实现数控机床刀架三维可视化模型的展示,按照合理的装配序列和装配路径进行运动仿真和人机交互操作训练。本文所建立的交互式虚拟装配仿真系统主要包括三维模型创建模块、模型导入模块、装配仿真模块、人机交互模块、功能集成模块。在功能上主要包括装配体零部件结构展示、快速装拆仿真、虚拟装配和虚拟拆卸。
2 技术路线及功能实现方法
2.1 三维模型的创建与导入
本文选择利用Pro/E建立LDB4数控机床刀架的三维模型,用它建立的三维数据模型具有准确的尺寸。为便于网络传输和进一步控制,将Pro/E建立的三维数据模型导入到3DMAX中进行材质设置,之后通过3 DMAX与EONStudio的接口插件,可方便地导入 EON Studio 进行开发设计[4-5]。
2.2 虚拟运动仿真功能实现
2.2.1 EON Studio 的功能节点
在EON Studio系统中,各种功能主要通过节点来实现。节点是一个具有功能和数据的对象,节点的数据信息一般包括域(field)和事件(event)两个方面,可以对节点的属性进行设置,或者对节点接收到的信息进行修改,也可以通过接口来操作其他节点。图1所示为EON Studio中节点的事件驱动原理。
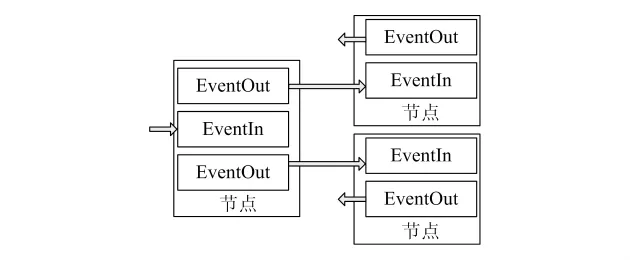
图1 EON Studio中节点的事件驱动原理
2.2.2 虚拟装配路径规划
装配路径是零部件在虚拟装配空间中的运动轨迹。装配路径的规划除包含了装配的工艺路线,亦包含了零件行走的正确轨迹,确保零部件更合理的装配,同时也获得更高的装配精度。
本文数控机床刀架装配体的设计是在完成零件造型的基础上,新建一个装配体,然后点击浏览,依次选择要插入的零部件即可。LDB4数控机床刀架装拆过程中零件的运动轨迹主要包括直线运动和旋转运动。两个零件之间的装配约束关系用3个坐标方向的位移以及绕这3个坐标方向的转动表示。针对具体的运动方式,在本文描述的虚拟装配系统当中主要利用Script节点、Path node节点和Place节点来进行控制。其中:Script节点主要用于实现数据的输入和输出[6];Path node节点用来实现旋转运动仿真;Place节点用来实现直线运动仿真。
2.3 人机交互控制与系统集成
EON Studio提供了与外部应用程序之间的通信接口EONX,EONX其实是一个 ActiveX控件,它能使EON Studio开发的应用程序在其他应用程序中显示并正常运行[7]。本文通过VC++调用EONX控件的接口函数,实现二者之间的数据传递。实现VC++与 EON Studio之间的通信过程的主要程序流程如下:
a.在 EON Studio中建立EventIn节点和EventOut节点,以实现事件的输入与输出。
b.在 EON Studio中建立 JScript节点,将JScript节点与EventIn节点或Event Out节点连接,JScript节点可以从EventIn节点接收数据,并将处理后的数据发送给EventOut节点。
c.在交互界面上通过按钮或文本框发送指令给VC++和EON Studio的接口程序,触发EON Script的事件。
d.在VC++中添加消息响应函数,对EventOut进行监听,并利用 SendEve函数将 VC++的数据传输给 EventIn 节点[8]。
2.4 实现的技术路线
根据系统所要实现的上述任务,确定本文实现LDB4数控电动刀架虚拟装配仿真系统的技术路线为:
a.利用三维几何建模软件构建设备模型,并对模型的品质等进行优化。
b.将三维模型输出为EON Studio能够识别的文件格式。通过三维几何建模软件和虚拟现实软件的数据接口,将模型转入到系统开发平台中,检查产品的初始模型是否正确,进行数据反馈和修改。通过可视化显示与分析,实现装拆项目的加载。
c.进行装配路径和零部件运动轨迹的规划,生成装配序列并记录序列信息。装配路径的规划包括装配约束的定义、装配定位和装配序列规划等,从而实现系统的运动仿真和设备拆装的自动演示。
d.创建基于装配序列和装配路径交互式虚拟装拆模块,在虚拟装拆的过程中提供相关知识信息。
LDB4数控机床刀架虚拟装配仿真系统的技术路线如图2所示。
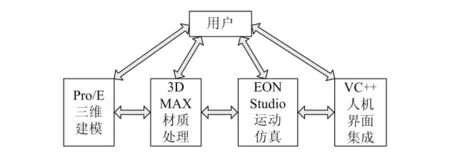
图2 LDB4数控机床刀架虚拟装配仿真系统技术路线图
3 刀架装拆的虚拟仿真过程模拟
完成的LDB4数控机床刀架虚拟装配仿真系统如图3所示。图3(a)为LDB4数控机床刀架仿真模型,图3(b)为LDB4数控机床刀架虚拟装配仿真系统的爆炸图。系统直观地表达出零部件之间的装配关系与装配意图,为虚拟装配做准备。装配模型中主要零部件及装配顺序规划如下:下刀体组件及中轴组件→电源线接线柱→上刀体组件→压簧→离合销→销→离合盘→平面轴承→止退圈→定位键→锁紧螺母→螺钉→发讯盘→小螺母→磁钢组件→螺钉→上罩→螺钉→防水垫→防水螺钉。LDB4数控机床刀架虚拟装配仿真系统操作及模块功能示意如图4所示。操作者可根据此运动仿真模型了解刀架结构组成、零部件之间的装配关系,进行快速装配或拆卸模拟,如图4(a)所示。亦可在虚拟环境下进行刀架装配或拆卸练习。以装配练习模块为例,当操作者将鼠标靠近任意一个零件,系统即自动显示该零件的基本信息,并提示装配路径中该零件所涉及到的相邻零部件。虚拟装拆过程中的装配体信息提示如图4(b)所示。如操作者未按正确路径进行装配或拆卸操作,系统会进行报错提示,同时部件无响应。
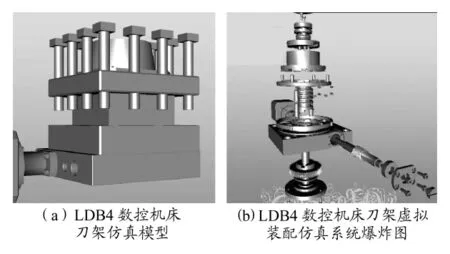
图3 LDB4数控机床刀架虚拟装配仿真系统
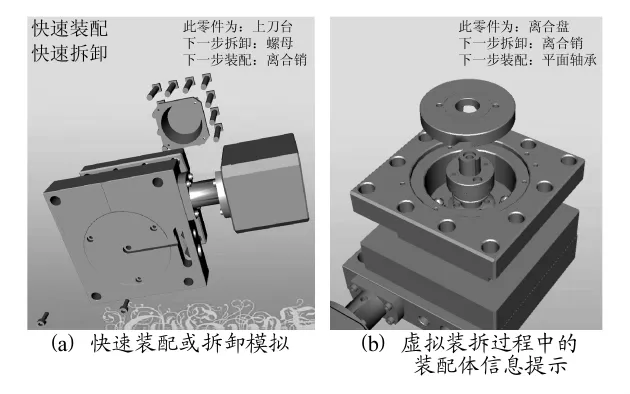
图4 LDB4数控机床刀架虚拟装配仿真系统操作及模块功能示意
4 结论
基于本文的研究工作可以得出以下基本结论:
a.借助虚拟现实技术,以LDB4数控机床刀架的拆装为例,开发了具有交互功能的虚拟装配仿真系统。系统通过人机交互的方式,对装配体的组成零部件进行结构和装配序列的认知以及实时运动仿真。为产品装配过程的设计、规划和分析提供了平台;为利用虚拟现实技术辅助进行产品设计和教学训练提供了可借鉴的途径。
b.系统以 EON Studio作为仿真环境,利用VC++6.0进行了二次开发,实现了软件之间的对接,为虚拟仿真问题的开发工具选择提供了参考。
c.进一步扩充和完善现有的虚拟仿真系统,深入研究虚拟现实技术,实现机械产品沉浸式的交互仿真,是今后进一步的研究方向。
[1]夏平均,陈朋,郎跃东,等.虚拟装配技术的研究综述[J].系统仿真学报,2009,21(8):2267 - 2272.
[2]Marcelino L,Murray N,Fernando T.A constraint manager to support virtual maintainability[J].Computers &Graphics,2003,27(1):19-26.
[3]刘诚,付宜利.基于EON的交互式虚拟装配仿真系统的设计与实现[J].东北林业大学学报,2009,37(8):109 -111.
[4]谢秋菊,刘桂阳,马铁民.基于EON的发动机机构运动虚拟仿真研究[J].黑龙江八一农垦大学学报,2009,21(3):84-86.
[5]魏园园,瞿畅,王君泽.网络环境下组合夹具虚拟装配平台的构建[J].组合机床与自动化加工技术,2011(8):98-100.
[6]张秀山.虚拟现实技术及编程技巧[M].长沙:国防科技大学出版社,1999.
[7]黄昌,娄燕,胡琳,等.基于EON的三坐标测量机虚拟仿真系统[J].微计算机信息(测控自动化),2010,26(11):81 -83.
[8]贾庆浩,刘林.基于 EON的虚拟运动仿真平台设计与实现[J].计算机技术与发展,2011,21(9):190-193.
The Design of Virtual Assembly Simulation System in CNC Machine Tool
ZHANG Yu
(Tianjin University of Technology and Education ,Tianjin,300222,China)
Taking the LDB4 NC machine tool turret as an example,it builds the framework of visual interactive simulation system,discusses the planning process of virtual assembly simulation and assembly path based on the EON development environment.Based on VC++6.0,it develops the system interface,packages the every function module,realizes the development of virtual assembly simulation system.
Virtual Assembly;Simulation;Path Planning
TP391
A
2095-509X(2013)05-0016-03
10.3969/j.issn.2095 -509X.2013.05.004
2012-12-17
国家高技术研究发展计划(863计划)重大课题(2011AA04A102);国家自然科学基金资助项目(31171457);天津职业技术师范大学科研发展基金资助项目(KJ11-03)
张宇(1979—),女,辽宁锦州人,天津职业技术师范大学讲师,硕士,主要研究方向为机械设计、虚拟仿真。
猜你喜欢
设备管理与维修(2020年23期)2021-01-04 00:15:10
制造技术与机床(2019年12期)2020-01-06 03:17:26
中小企业管理与科技(2019年22期)2019-09-09 00:40:04
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
制造技术与机床(2017年3期)2017-06-23 08:11:51
电子制作(2017年20期)2017-04-26 06:57:41
商周刊(2017年24期)2017-02-02 01:42:55
海外星云(2016年7期)2016-12-01 04:18:00
IT时代周刊(2015年8期)2015-11-11 05:50:37
