
基于光束法平差的POS系统视准轴偏差检校
2012-12-27 06:40赵海涛左正立陈正超
自然资源遥感 2012年3期
赵海涛,张 兵,左正立,陈正超
(1.中国科学院对地观测与数字地球科学中心,北京 100094;2.中国科学院研究生院,北京 100049)
基于光束法平差的POS系统视准轴偏差检校
赵海涛1,2,张 兵1,左正立1,陈正超1
(1.中国科学院对地观测与数字地球科学中心,北京 100094;2.中国科学院研究生院,北京 100049)
航空摄影测量的直接地理定位(direct georeferencing,DG)必须首先进行惯性测量单元(inertial measurement unit,IMU)和传感器间的视准轴偏差(boresight misalignment)检校。提出了一种简便的定位定向系统(position and orientation system,POS)辅助光束法平差检校模型,推导了其基础误差方程,并通过2个试验区验证该方法检校结果与商用软件CALQC的检校结果基本一致。通过直接地理定位互差和上下视差比较,证明用本文方法进行的视准轴偏差检校是正确有效的,检校后的外方位元素可直接用于1∶10000比例尺的高山地区地形图测图。
定位定向系统(POS);视准轴偏差;光束法平差;检校;直接地理定位
0 引言
定位定向系统(position and orientation system,POS)用于航空遥感,可获取传感器的空间位置和姿态信息,以实现直接地理定位(direct georeferencing,DG),现已广泛应用于各类航空遥感器(如航空相机、机载三维激光雷达、合成孔径雷达和成像光谱仪等)。然而,要利用POS系统获取的位置和姿态信息,实现高精度的DG,需要首先解决2个主要问题:①POS系统导航坐标系下的位置和姿态信息变换到制图坐标系下[1-4]; ②惯性测量单元(inertial measurement unit,IMU)和传感器间的视准轴偏差(boresight misalignment)检校及偏心分量改正[5-8]。
由组合导航原理可知,组合导航解算的位置和姿态是基于当地导航坐标系的,进行遥感应用时需将其换算到制图坐标系下:对于位置,可采用坐标投影变换的方法;对于姿态,一般采用补偿矩阵补偿地球曲率和子午线收敛角影响后求解制图坐标下姿态[2,4];对于偏心分量改正,可以通过平板玻璃法或者经纬仪方法测定[9],并在GPS和IMU数据联合卡尔曼滤波处理时补偿消除。
对于视准轴偏差的检校,可以采用地面检校方法[2,5,7]和飞行检校方法[5,7,10]。地面检校方法在室内或者野外布设检校场进行检校,方法简单方便、成本低,但检校精度受到POS系统地面测角精度较低的限制[5]。飞行检校方法则在测区中选定一块区域或单独布设一块区域作为检校场,检校精度可以达到甚至优于 POS系统测角精度水平[6,10]。在飞行检校方法中,视准轴偏差可以通过2种方式确定:①采用传统的光束法平差方式求解出每张航片的外方位元素,通过与POS获取的外方位元素直接比较,求出视准轴偏差[2,8,11]; ②采用 POS 辅助光束法平差的方式将POS系统提供的外方位元素作为具有随机和系统误差的观测值,将视准轴偏差作为未知数引入到误差方程中,通过光束法平差方式解求视准轴偏差[7,12]。第一种方式在理论上不够严密,且传统空中三角测量耗时耗力,没能利用POS系统提供的位置和姿态观测值;第二种方式在理论上比较严密,不需要或只需要少量地面控制点即可进行检校。但第二种方法比较复杂,需要较多的观测条件和较好的连接点分布状态;且当其用于单线阵推扫式传感器视准轴偏差检校时,由于条带间连接点构网强度弱,观测条件较少而待求未知数多,误差方程无法求解。为简化和解决此问题,本文在此基础上推导了一种简单的检校方法:将POS系统高精度的位置和姿态信息作为只含有系统误差的观测值,采用光束法平差,利用较少量的观测条件,即可获得较佳的视准轴偏差检校结果。本文基于面阵相机进行了视准轴偏差检校,验证了上述方法的有效性,为进一步研究如何将该方法用于单线阵推扫式传感器的视准轴偏差检校打下基础。
1 检校原理
1.1 常用坐标系
常用的坐标系主要有6种:①像空间坐标系(i)。该坐标系是一种过渡坐标系,用来表示像点在像方空间的位置。该坐标系以投影中心为原点,X轴指向飞机飞行方向,平行于像平面坐标系的x轴;Y轴指向飞机左侧,平行于像平面坐标系的y轴;Z轴向上;是一个右手空间直角坐标系。②IMU载体坐标系(b)。该坐标系的原点位于IMU中心,轴向平行于IMU的3个陀螺轴,POS系统所提供的侧滚角(roll)、俯仰角(pitch)和航向角(heading)即是其3轴相对于导航坐标系的3个欧勒角。③航摄仪载体坐标系(c)。该坐标系的原点位于航摄仪投影中心,X轴指向飞机飞行方向,Y轴指向飞机右侧,Z轴方向向下;各轴与像空间坐标系平行,但与像空间坐标系的x轴、z轴的指向相反。④导航坐标系(g)。该坐标系是与参考椭球相切的局部水平坐标系,其X轴与过投影中心的子午线相切,指向北方;Y轴垂直于该子午面,指向东方;Z轴指向下方。⑤制图坐标系(m)。该坐标系为地图投影坐标系(如高斯投影坐标系、通用横轴莫卡托投影坐标系(UTM)等),在小区域研究时可以认为其为直角坐标系。⑥像空间辅助坐标系()。该坐标系是一种过渡坐标系,它以投影中心为坐标原点,3轴平行于制图坐标系。
1.2 POS系统视准轴偏差
IMU与传感器固联安装时,在理论上应保证IMU载体坐标系坐标轴和航摄仪载体坐标系各坐标轴精确平行;但由于安装工艺的限制,总存在着IMU与航摄仪各坐标轴指向间有一个微小的角度差。为此,需经3个微小的旋转角(Θx,Θy,Θz)即视准轴偏差旋角(boresight misalignment angles)变换,将IMU姿态归算到航摄仪姿态。图1为视准轴偏差旋角示意图。
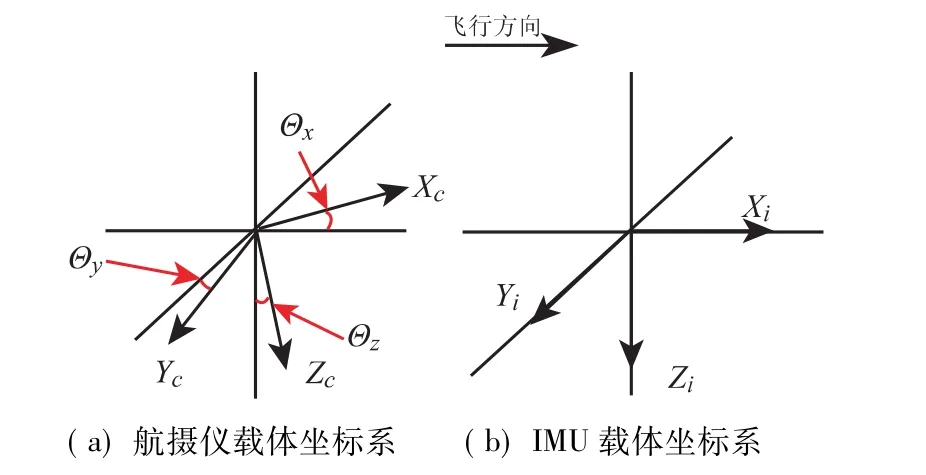
图1 视准轴偏差旋角示意图[5]Fig.1 Sketch map of the boresight misalignment angles between IMU and camera frame[5]
1.3 POS辅助的光束法平差模型
POS系统根据IMU测出的角速度和加速度向量,与GPS数据经松耦合或紧耦合卡尔曼滤波(the Kalman filtering)计算,可解算出基于导航坐标系下的位置和姿态信息;经投影变换和姿态角换算后,可以提供制图坐标系下的传感器获取图像瞬间的位置和姿态元素(即摄影测量所称的6个“外方位元素”)。根据摄影测量共线方程原理,可得
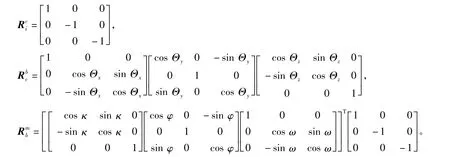


式中:x,y为像点坐标观测值;x0,y0为像主点坐标;tx,ty,tz,Xshift,Yshift,Zshift为未知数。式(4) 是一非线性关系式,按泰勒级数将其展开至一次项,并顾及地面控制点误差方程式,得到矩阵形式的基础误差方程,即

式中:VX,VC分别为像点坐标、地面控制点坐标观测值改正数向量;A,B为相应未知数的系数矩阵(即各观测方程对未知数的一阶偏导数);x=[ΔX ΔY ΔZ]T为物方点坐标未知数增量向量;t=[ΔtxΔtyΔtzΔXshiftΔYshiftΔZshift]T为视准轴偏差未知数增量向量和外方位线元素系统误差未知数增量向量(其初始迭代值为零);LX为像点坐标观测值残差向量(其中为以未知数近似值代入式(4)求出的像点坐标计算值);LC为控制点坐标观测值残差向量(将控制点外业坐标当作近似值时为零);E为单位矩阵;为地面控制点坐标观测值权阵(其中σ0为像点坐标量测中误差;σc为地面控制点中误差)。
基础误差方程(式(5))中,待求的未知数的个数为6+3n,误差方程式的个数为3m+2(n+m)k(其中:n为待定的无重复加密点个数;m为地面控制点个数;k为重叠系数,表示同一加密点在不同像片上出现的平均次数)。由此可以看出,基础误差方程与像片个数无关;与传统光束法平差相比,由于未知数个数减少,用此方程求解更加简单、更容易收敛。以此算法模型为基础,笔者用VC++编写了软件模块将其实现,其输入值分别为像点坐标、控制点地面坐标、图像外方位元素和传感器内方位元素,输出值为视准轴偏差和外方位线元素系统误差。
2 算法试验与分析
2.1 试验设计
为验证上述视准轴偏差检校模型的有效性,选取POS系统辅助模拟相机RC30和数字相机UCXp航摄的试验区数据(表1),分别采用POSPac软件包的CALQC视准轴偏差检校模块(采用POS辅助严密光束法平差模型)和基于本文算法建立的检校模块进行检校比较。
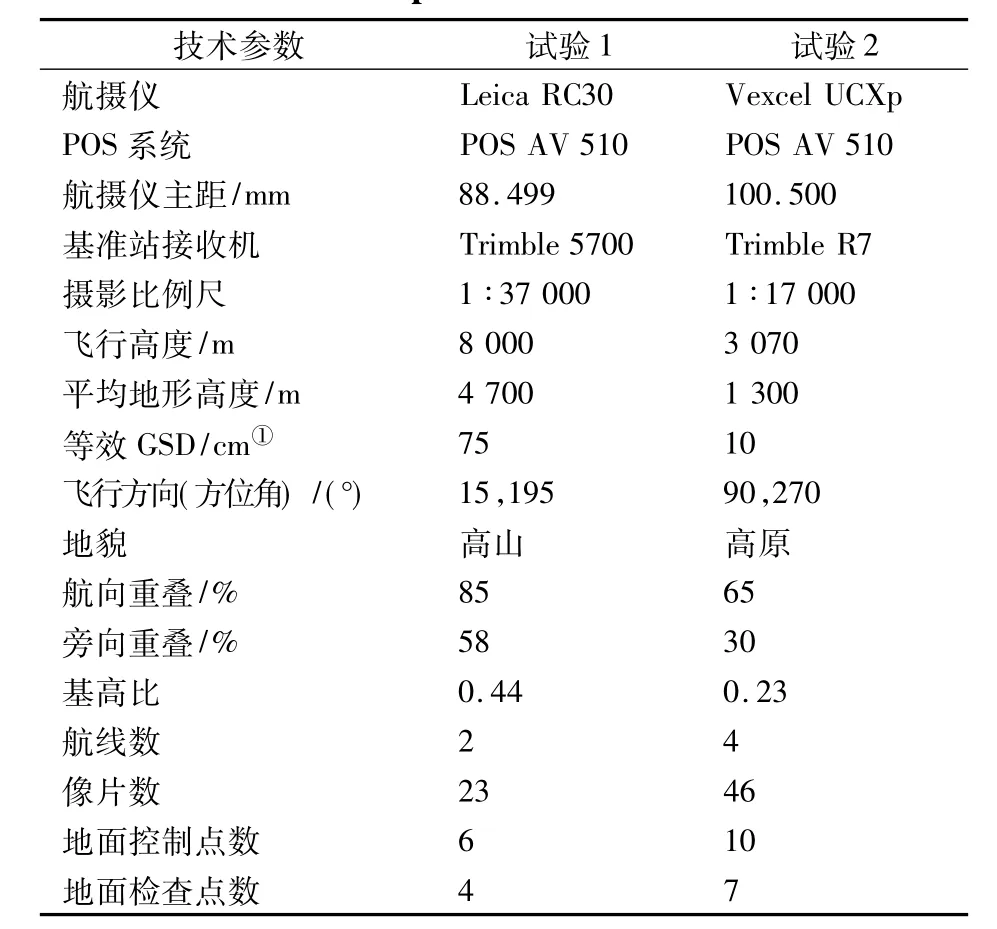
表1 试验区航空摄影技术参数Tab.1 Aerial photogrammetric parameters of the experimental blocks
试验1中含有实时动态差分(real-time kinematic,RTK)方式测量的6个地面控制点和4个地面检查点,这些点均匀分布于测区内,位置精度优于10 cm;RC30全色图像负片采用21 μm间距扫描数字化,其POS数据处理利用了2 Hz的地面基准站数据,外方位元素解算输出到WGS84-UTM坐标系下。试验2中含有RTK方式测量的10个地面控制点和7个地面检查点,其均匀分布于测区内,位置精度优于5 cm;UCXp图像数据采用Ultramap软件进行处理,输出融合的RGB图像;POS数据处理也利用了2 Hz的地面基准站数据,外方位元素解算输出到WGS84-UTM坐标系下。依照我国现行地形图航空摄影规范[13],试验1的图像和试验2的图像可分别用于1∶10000和1∶1000比例尺的地形图制图。
2.2 视准轴偏差检校结果分析
在试验1中抽取2条航线共23张航片,采用第三方软件手工量取了连接点,采用patb软件进行空三加密、剔除粗差点后,连接点坐标总体量测精度(中误差)优于±6.0 μm(连接点构网如图2所示)。
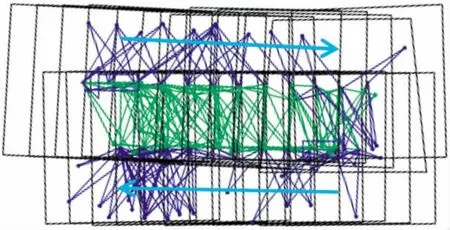
图2 试验1转点构网分布图Fig.2 Distribution nets of the pass and tie points in test1
在CALQC模块中导入上述剔除粗差后的连接点坐标,采用不同方案进行视准轴偏差检校;而后又将POSPac软件包输出的外方位元素和上述连接点像点坐标作为输入值,输入本文编写的软件中进行视准轴偏差检校。为验证本文检校算法的正确性,采用了5种方案分别对检校结果进行对比验证,各方案的检校结果对比见表2。

表2 试验1中不同方案视准轴偏差检校结果比较Tab.2 Comparison of the different boresight misalignment calibration results in test1
为验证本文检校算法的稳定性,又利用试验2测区进行检校。试验2中采用了4条航线共45张航片,利用CALQC采用不同策略进行连接点自动匹配(图3)。
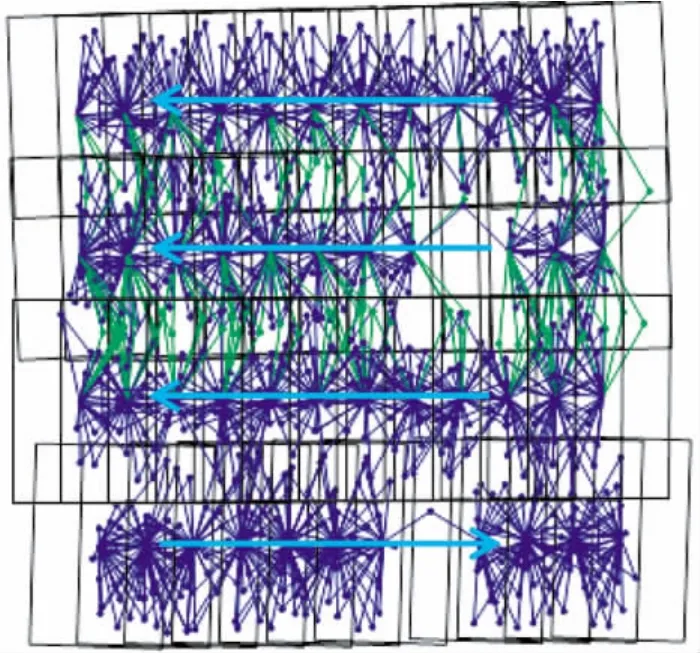
图3 试验2区域4条带连接点构网分布图(由于Event mark丢失,最下方条带中间缺少一张航片)Fig.3 Distribution nets of the pass and tie points of the four strips in test2
提取了2套连接点坐标,并手工量取了地面控制点和检查点的像点坐标,经自由网无约束平差、剔除粗差连接点后,像点坐标总体量测精度(中误差)优于±2.0 μm。利用此连接点和POSPac软件包解算的外方位元素,分别在CALQC模块和本文软件中采用5种方案进行视准轴偏差检校,其中方案1和2采用了同一套连接点,连接点构网分布如图3所示。
方案3,4,5采取了另一套连接点,如图4所示。
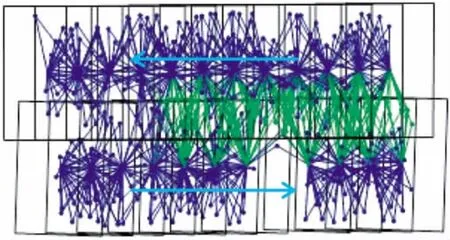
图4 试验2区域下方2条带连接点构网分布图Fig.4 Distribution nets of the pass and tie points of the two strips in the bottom of test2
各种方案的检校结果对比见表3。

表3 试验2中不同方案视准轴偏差检校结果比较Tab.3 Comparison of the different boresight misalignment calibration results in test2
由表2和表3可以得出以下结论:①本文算法的视准轴偏差检校结果与CALQC商用软件的视准轴偏差检校结果基本一致,再次确认了本文算法模型是正确、稳定的;②视准轴偏差检校结果对航片数不敏感,不同片数下的检校结果变化不大;③同一套连接点下,无论商用软件还是本文软件的检校结果都比较稳定、一致;④鉴于不同套连接点下的视准轴检校结果的互差较大,说明连接点的分布决定了视准轴偏差检校结果;⑤为保持检校的稳定性,仍推荐采用2条航带以上、每航带8张航片以上的采样量。
2.3 不同视准轴偏差下的定位结果比较
为验证视准轴偏差检校结果的有效性,将外方位元素经视准轴偏差改正后重新输出,采用双片前方交会进行直接地理定位,对定位结果进行比较。这里假设CALQC模块的检校结果为真值,将外方位角元素经该检校结果改正后进行直接地理定位,视其解算的连接点地面坐标为真值;将此坐标值和基于本文算法检校的外方位元素直接地理定位结果进行比较,比较结果如表4。
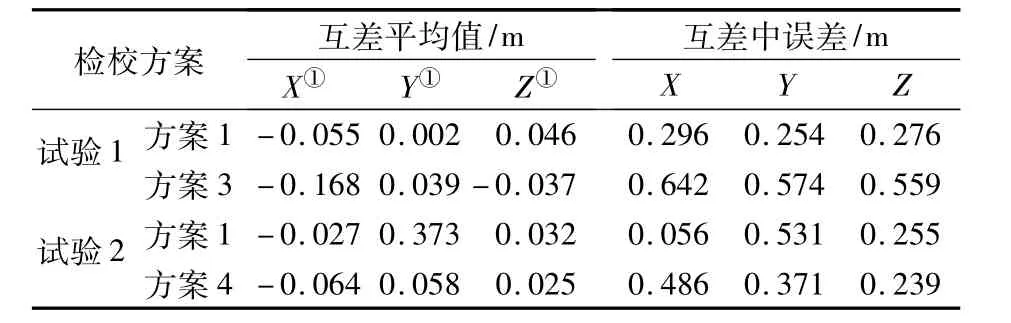
表4 不同方案视准轴偏差检校结果下的直接地理定位互差Tab.4 DG differences of the results of different boresight misalignment calibration
综合表2—4可以得出:①直接地理定位互差与视准轴偏差互差相关,说明视准轴偏差检校结果直接决定了对地目标定位结果;②除试验2方案1外,其他方案都是相向飞行的检校方案,直接对地定位互差平均值较小,而互差中误差较大,说明相向飞行可以抵偿视准轴偏差检校误差带来的整体性系统误差。
直接地理定位时,双片前方交会的上下视差也间接反映了视准轴偏差检校的精度;若不考虑POS系统固有的精度限制和系统误差影响,则上下视差越大表示视准轴偏差检校精度越低。依次比较所有连接点不同检校方案的直接地理定位上下视差的结果如表5所示。
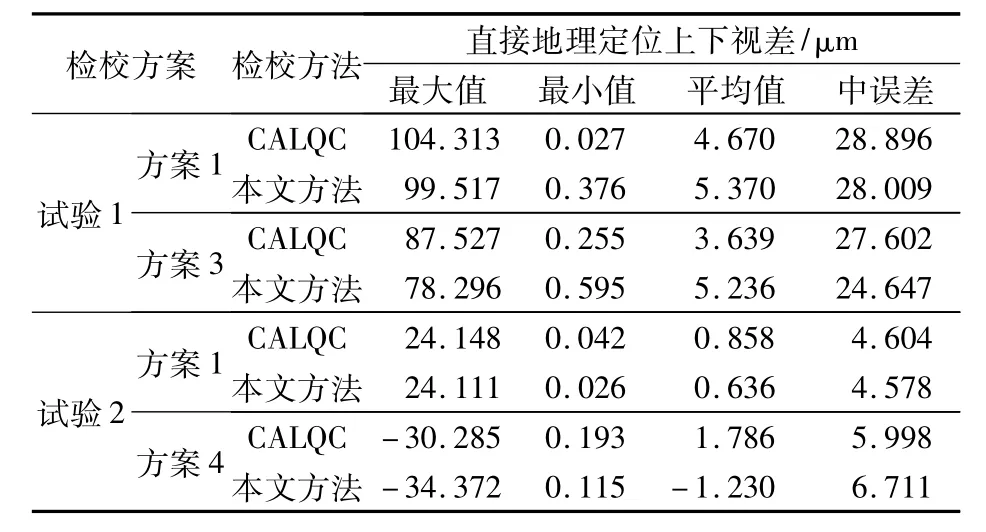
表5 不同方案视准轴偏差检校结果下的直接地理定位上下视差Tab.5 Y -parallaxes of DG employing the different results of boresight misalignment calibration
由表5可以看出:①不同方案下的CALQC模块和本文视准轴偏差检校后的直接定位上下视差基本一致,它们的中误差大小都在1个像元左右(其中,基于模拟相机的前方交会上下视差略大于1个像元,基于数字相机的前方交会上下视差略小于1个像元);②由于上下视差较小,间接证实了本文视准轴偏差检校结果的正确性。
由于检校后的外方位元素直接定位上下视差为一个像元左右,可以先通过相对定向求出相对定向模型下的定向点模型坐标;再通过直接地理定位的方式求出定向点的物方坐标,拟合出绝对定向的7个参数;最后按照相对定向—绝对定向的模式进行测图。这样,既利用了POS直接解算的外方位元素,又解决了其直接安置上下视差不稳定问题。
通过对地目标定位的绝对定位精度也可以检核视准轴偏差检校的精度及稳定性。试验1区内均匀分布的4个检查点共在13个立体像对上出现;试验2区内均匀分布的7个检查点共在20个立体像对上出现。利用经视准轴偏差改正后的外方位元素进行的双片前方交会直接地理定位对各立体像对下的解算结果和检查点坐标进行比较,得到绝对定位精度(表6)。
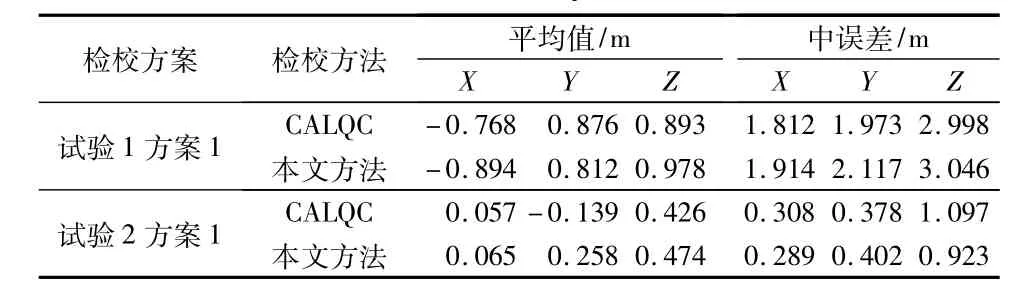
表6 不同方案下的绝对定位精度Tab.6 DG absolute accuracy of different scenarios
由表6可以得出:①CALQC模块和本文方法视准轴偏差检校后的绝对定位精度基本一致;②直接地理定位在平面和高程方向存在系统误差,这一方面是由POS系统解算的外方位元素系统误差所引起[3],另一方面是由视准轴偏差的系统误差所引起;③基于本文方法和CALQC模块检校结果的直接地理定位高程精度都低于平面定位精度,一方面是由摄影测量的基高比所引起,另一方面是由外方位线元素坐标投影换算时高程方向和平面方向投影比例不一致所引起[3];④平面和高程方向存在的较大系统误差,可以采用基于地面控制点检校出的外方位线元素系统误差来补偿消除一部分;⑤试验1方案1下的CALQC模块和本文方法检校下的直接地理定位平面中误差都在2.2 m以下,高程在3.1 m以下,满足我国《1∶5000,1∶10000地形图航空摄影测量内业规范》对于1∶10000比例尺高山地区地形测图地物检查点坐标不符值的平面中误差≤7.5 m、高程中误差≤4.0 m 的限差要求[14]。试验2方案1的CALQC和本文方法检校下的直接地理定位平面中误差在0.41 m以下,高程中误差在1.1 m以下,可满足我国《1∶500,1 ∶1000,1 ∶2000 地形图航空摄影测量内业规范》对于1∶1000比例尺平地地形测图地物检查点坐标不符值平面中误差≤0.6 m限差要求;但在高程方向上还不能满足高程中误差≤0.35 m 的限差要求[15]。
3 结论
1)本文在视准轴偏差检校时,没有对POS系统解算的外方位元素偶然误差进行改正,认为此外方位元素主要受系统误差即位置平移量和视准轴偏差的影响(对于高精度的POS系统,此种假设是合理的),因而减少了误差方程未知数的个数,只利用很少的连接点即可解算视准轴偏差,简化了对连接点构网强度的要求。
2)通过试验数据的验证表明,本文的光束法平差检校算法是可靠、有效的。采用基于本文算法检校结果的外方位元素直接地理定位误差和商用软件的结果一致,直接定位时上下视差的中误差在1个像元左右。
3)经本文方法检校后的外方位元素,可以直接用于1∶10000比例尺[14]的高山地区的地形图测图;对于1∶1000比例尺的测图,平面上可以满足《规范》[15]的精度要求,但高程上还不能满足《规范》[15]的精度要求。
以后笔者将进一步研究加入相机内方位元素修正的自检校方法,开展将该方法用于线阵传感器的视准轴偏差检校的试验。
志谢:本文对中飞四维公司提供试验1区域数据和黎东、祁增营参与试验2区域中GPS RTK地面控制点测量工作表示衷心的感谢。
[1]Hutton J,Savinal T.Computation of Phi Omega Kappa from Roll Pitch Heading[R].Applanix Technical Note,2000.
[2]Baumker M ,Heimes F J.New Calibration and Computing Method for Direct Georeferencing of Image and Scanner Data Using the Position and Angular Data of an Hybrid Inertial Navigation System[J].Integrated Sensor Orientation,2002,43:197 -212.
[3]Legat K.Approximate Direct Georeferencing in National Coordinates[J].ISPRS Journal of Photogrammetry and Remote Sensing,2006,60(4):239 -255.
[4]刘 军,王冬红,张永生.GPS/INS系统HPR与OPK角元素的剖析与转换[J].测绘科学,2006,31(5):54 -56.Liu J,Wang D H,Zhang Y S.Analysis and Transformation Between HPR and OPK Angles for the GPS/INS System[J].Science of Surveying and Mapping,2006,31(5):54 - 56(in Chinese with English Abstract).
[5]Mostafa M.Boresight Calibration of Integrated Inertial/Camera Systems[C]//Proceed.Int MMR Mostafa - symposium on Kinematic Systems in Geodesy,Geomatics and Navigation - KIS.Banff,Canada,2001.
[6]Cramer M,Stallmann D.System Calibration for Direct Georeferencing[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2002,34(3):79 -84.
[7]Mostafa M,Schwarz K P.Digital Image Georeferencing from a Multiple Camera System by GPS/INS[J].ISPRS Journal of Photogrammetry and Remote Sensing,2001,56(1):1 -12.
[8]王建超,郭大海,郑雄伟.机载POS直接地理定位的精度分析[J].国土资源遥感,2007(4):33 -38.Wang J C,Guo D H,Zheng X W.Accuracy Analysis of Airborne POS - supported Photogrammetry[J].Remote Sensing for Land and Resources,2007(4):33 - 38(in Chinese with English Abstract).
[9]袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001:29 -31.Yuan X X.The Principle and Application of GPS-supported Aerial Triangulation[M].Beijing:Publishing House of Surveying and Mapping,2001:29 -31(in Chinese).
[10]Honkavaara E.In-flight Camera Calibration for Direct Georeferencing[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(1):166 -171.
[11]袁修孝,杨 芬,赵 青,等.机载POS系统视准轴误差检校[J].武汉大学学报:信息科学版,2006,31(12):1039-1043.Yuan X X,Yang F,Zhao Q,et al.Boresight Calibration of Airborne Position and Orientation System[J].Geomatics and Information Science of Wuhan University,2006,31(12):1039 - 1043(in Chinese with English Abstract).
[12]袁修孝.POS辅助光束法区域网平差[J].测绘学报,2008,37(3):342-347.Yuan X X.POS - supported Bundle Block Adjustment[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):342 - 347(in Chinese with English Abstract).
[13]国家测绘局测绘标准化研究所.GB/T 15661—20081∶5000,1 ∶10000,1 ∶25000,1 ∶50000,1 ∶100000 地形图航空摄影规范[S].北京:中国标准出版社,2008.State Bureau of Surveying and Mapping Surveying and Mapping Standardization Institute.GB/T 15661 -20081 ∶5000,1 ∶10000,1 ∶25000,1 ∶50000,1 ∶100000 Topographic Maps Specifications for Aerial Photography[S].Beijing:Standards Press of China,2008(in Chinese).
[14]国家测绘局测绘标准化研究所.GB/T 13990—19921∶5000,1∶10000地形图航空摄影测量内业规范[S].北京:中国标准出版社,1992.State Bureau of Surveying and Mapping Surveying and Mapping Standardization Institute.GB/T 13990 -921 ∶5000,1 ∶10000 Topographic Maps Specifications for Aerophotogrammetric Office Operation[S].Beijing:Standards Press of China,1992(in Chinese).
[15]国家测绘局测绘标准化研究所.GB/T 7930—20081∶500,1∶1000,1∶2000地形图航空摄影测量内业规范[S].北京:中国标准出版社,2008.State Bureau of Surveying and Mapping Surveying and Mapping Standardization Institute.GB/T 7930 - 20081 ∶500,1 ∶1000,1∶2000 Topographical Maps Specifications for Aerophotogrammetric Office Operation[S].Beijing:Standards Press of China,2008(in Chinese).
POS System Boresight Misalignment Calibration with Bundle Adjustment Method
ZHAO Hai- tao1,2,ZHANG Bing1,ZUO Zheng - li1,CHEN Zheng - chao1
(1.Center for Earth Observation and Digital Earth of Chinese Academy of Sciences,Beijing 100094,China;2.Graduate University of Chinese Academy of Sciences,Beijing 100049,China)
The boresight misalignment between inertial measurement unit(IMU)and sensor should be calibrated firstly for direct georeferencing(DG)of aerial photogrammetry.For this reason,the authors presented a simple and convenient boresight calibration model of position and orientation system(POS)-supported bundle block adjustment,and derived the fundamental error equation.The calibration result of this method is accordant with the calibration result of the commercial software CALQC in two empirical blocks.The method of boresight misalignment calibration proposed in this paper is correct and effective,as evidenced by a comparison with the DG results and y-parallax.The exterior orientations corrected with the calibration result can be directly used for mapping the topographic map at the scale of 1 ∶10000 in high mountain areas.
position and orientation system(POS);boresight misalignment;bundle adjustment;calibration;direct georeferencing(DG)
TP 706
A
1001-070X(2012)03-0022-07
2011-11-04;
2012-02-12
中国科学院对地观测与数字地球科学中心主任基金资助项目(编号:YIZZ10101B)资助。
10.6046/gtzyyg.2012.03.05
赵海涛(1983-),男,博士研究生,工程师,主要研究方向为POS辅助航空摄影测量与高光谱遥感。E-mail:htzhao@ceode.ac.cn。
张 兵,Tel.:86-10-82178002,Fax:86-10-82178009,E -mail:zhangbing@ceode.ac.cn,通信地址:北京市海淀区邓庄南路9号,邮编:100094。
(责任编辑:刘心季)
猜你喜欢
幼儿园(2021年12期)2021-11-06
河南城建学院学报(2020年3期)2020-08-14
测绘通报(2019年4期)2019-05-10
同济大学学报(自然科学版)(2018年11期)2018-12-04
资源导刊(信息化测绘)(2018年10期)2018-11-05
测绘通报(2018年6期)2018-07-03
新课程·小学(2017年8期)2017-09-20
IT经理世界(2017年4期)2017-03-25
汽车文摘(2016年6期)2016-12-07
火控雷达技术(2016年2期)2016-02-06
