
基于DSP矿用蓄电池电机车交流牵引控制系统的研究①
2012-12-26 06:21邓永红赵立永黄成玉
华北科技学院学报 2012年1期
邓永红 赵立永 黄成玉
(华北科技学院信息与控制技术研究所,北京东燕郊 101601)
基于DSP矿用蓄电池电机车交流牵引控制系统的研究①
邓永红②赵立永 黄成玉
(华北科技学院信息与控制技术研究所,北京东燕郊 101601)
本文研究设计了基于16位高速单片微机dsPIC30F6010A[1-2]的矿用电机车交流变频调速牵引控制系统,给出了牵引控制系统的硬件和软件实现方案及电路结构。采用转差频率控制策略和电压空间矢量脉宽调制(SVPWM[3])的控制算法,实现了矿用电机车速度闭环控制。实验结果表明,该牵引控制系统能够满足矿用电机车交流变频调速运行的要求,可以在煤矿行业内推广。
矿用电机车;微芯dsPIC30F6010A单片机;牵引控制系统;SVPWM;转差频率
1 问题的提出
矿用电机车是煤矿生产中的一种重要运输装置,其一直沿用直流电动机驱动。由于电刷维护和换向器火花等缺点,使得矿用电机车直流传动系统的运营成本高,运行可靠性低,维修费用高。随着电力电子技术的发展,采用电力电子变流器的交流传动系统得以实现,特别是大规模集成电路和计算机控制的出现,交流调速的性能得到了很大的进步,交流牵引电机车与直流牵引电机车相比较,具有功率高,效率高,体积小,重量轻,可靠性高,维护量小,减少了维护成本,无滑环和换相器,易于安全防爆等显著优点;同时交流变频调速具有明显的节能效果,耗能和发热量都明显减小。所以说,交流牵引电机车取代直流牵引电机车,用先进的交流变频调速技术取代传统的直流串电阻和直流斩波调速技术是矿用电机车发展的必然趋势。
电机车负载变化频繁,供电电源波动大,工作环境恶劣,起动力矩大,同时要能在5‰的坡上停车,根据电机车的特点和应用的实际要求,采用交流变频调速方案,对矿用电机车的直流传动系统进行改造。兼顾技术先进性和工程实用性,基于16位单片微机dsPIC30F6010A,采用转差频率控制策略和SVPWM控制算法,实现矿用电机车闭环控制,有很好的实用意义。

图1 系统控制结构图
2 电机车交流传动系统组成
矿用电机车交流牵引控制系统结构框图如图1所示。电机车交流变频调速控制系统主要由铅酸蓄电池组,滤波支撑电容,三相逆变桥,电流传感器,单片机控制电路,驱动电路,检测电路以及制动单元构成。整个系统以牵引逆变器为核心,由铅酸蓄电池组提供直流电压,通过三相逆变器单元输出频率可调的三相交流电,驱动两台三相交流异步牵引电机。司控台发出启动/停止命令,转速档位切换或者多段速给定,检测回路处理和检测交流输出电流,输入直流电压,散热器温度,电机实际转速等。并把相关状态信息送给牵引逆变器处理,计算出牵引逆变器每个开关管的导通时间,输出三相SVPWM波,经过驱动电路,驱动IGBT开关管。
3 牵引控制系统硬件组成
3.1 微芯单片微机dsPIC30F6010A控制系统
微芯单片微机dsPIC30F6010A控制电路是本系统的核心部分,其框图如图2所示。控制系统由5个部分组成:(1)由dsPIC6010A单片机、外部端子数字量输入信号、速度检测电路等组成的DSP数字系统,它能完成各种数字计算、外部端子控制、电机车的起/停控制运行、正反转运行、点动运行、多段速给定等功能;(2)模拟量接口电路,主要由电压电流检测与调理、温度检测与调理、电机速度给定电路等组成。电压、电流检测电路主要是将强电信号转换为弱电信号,供DSP进行数字采样;(3)IGBT驱动电路,将DSP系统发出的SVPWM信号转化为可驱动IGBT的脉冲信号,同时当IGBT发生短路或过流故障时,向DSP系统反馈故障信号;(4)CAN通信电路; (5)液晶显示与键盘操作电路,可以通过键盘设定各种给定指令和参数,如实现电机车的起动与停止,给定电机车的运行速度值等;可以显示电机车变频调速运行的各种状态,并记录电机车历史运行故障。
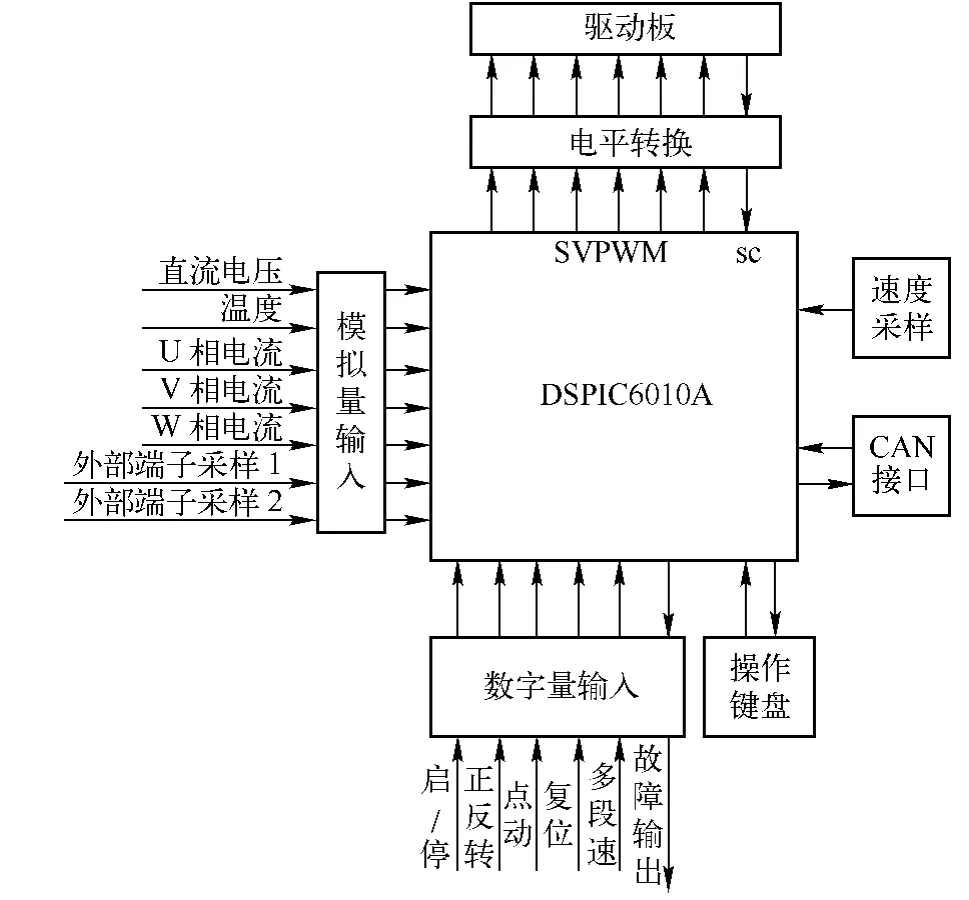
图2 单片微机控制系统框图

图3 T法测速原理图
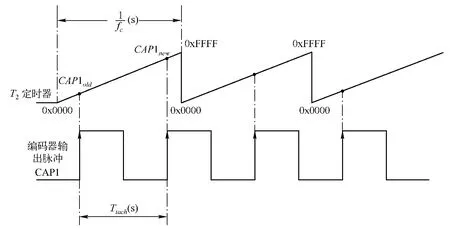
图4 测速方法示意图
3.2 电机速度检测电路
矿用电机车,电机测速非常重要,尤其采用转差频率控制策略,必需精确测量电机的实际转速。电机的速度测量使用的是光电编码器,光电编码器发出的脉冲经过滤波后,输入到DSP的捕获寄存器。而采用的测速方法是纯粹的T法测速,即利用一个高频基准时钟fc测量编码器相邻两个转速脉冲之间的时间间隔,以此计算电机的转速,其原理如3所示。若计数器的读数为m2,编码器每转一圈发出脉冲数为P,则电机的转速为:

矿用电机车的转速范围nM=0~3000 rpm,编码器为p=60脉冲/转,用DSP的内部定时钟T2作为高频基准时钟,增计数模式,计数频率为fc,管脚CAP1/QEP0/IOPA3,设定为CAP1功能/选择定时器T2上升沿捕获,其具体测速如图4所示。
CAP1old存的是寄存器CAP1FIFO上某一时刻的值,CAP1new存的是寄存器CAP1FIFO当前时刻的值,正是一个编码器脉冲相邻两个上升沿对应的T2计数器(T2CNT)的计数值,选择合适的T2计数器频率fc,就能计算出电机的实际转速。
3.3 系统温度检测电路
交流变频调速控制系统的功率器件组成的逆变器,全部组装在一块铜基板上,再整体将铜基板安装到防爆外壳内侧,铜基板的另外一面经处理后,裸露在外面,与牵引车外壳紧密接触,实现自然散热冷却或者走行风冷。对控制系统温度的检测非常重要,本系统中温度检测采用PT100温度传感器来完成。检测电路如图5所示。PT100与控制系统散热器表面充分接触,当逆变器温度发生变化时,PT100的阻值也随之变化,利用图5所示的电路可以测得阻值的变化,从而测得逆变器的温度。图5中运算放大器U1和电阻组成一个200mA恒流源电路,利用恒流源将PT100的阻值转换为电压信号,再利用U2运算放大器调整信号后,再将信号送给单片机,由单片机计算出逆变器的温度。

图5 逆变器温度检测电路原理图
4 转差频率控制策略
转差频率控制[4]是基于交流电机稳态模型而建立的控制思想,若系统的转差频率fs在很小的范围内,只要能够保持气隙磁通不变,电机的转矩就近似与fs成正比,通过控制fs即可间接控制电机的转矩。
要满足矿用电机车恒力矩起动、恒功率运行的牵引特性要求,关键是作好对系统输出频率的控制,并能使系统的输出频率自动平滑的调节,在实际的系统中采用了如式(2)的控制模型:


在该控制模型中,取f1=fn+fs使输出频率f1得以和转速fn同步升降,与转速开环系统中按电压成正比地直接产生频率给定信号相比,加减速更为平滑,且容易使系统达到稳定。
5 软件设计

图6 控制软件流程图
本系统软件程序主要由主程序、定时器T1中断服务程序、捕获中断服务程序、CAN通信中断程序、波形发生器中断程序等组成。软件流程图如图6所示。主程序主要完成CPU系统初始化设置,看门狗设置,电源系统设置,各种中断及中断优先级社会自,初始化变量和数据设置,特殊功能寄存器和外部事件管理寄存器的初始化设置,I/O口设置,开中断等功能。
CAN通信中断服务程序,主要完成与操作键盘的通信,将矿用电机车交流变频调速控制系统的运行状态、故障信息发给键盘显示;同时接收键盘的设置命令。捕获中断服务程序,主要完成电机速度的采样计算。波形发生器中断服务程序,主要完成周期寄存器和占空比的更新,占空比的计算以及SVPWM波的生成输出。
定时器T1中断服务程序,主要完成以下工作:(1)外部各端子信号的采样,采样电机车的起停、方向、点动信号,CPU的复位信号,电机车的多段速度指令信号,输出故障信号等。(2)模拟量输入直流电压、温度、输出三相电流、给定速度的采样计算。(3)完成电机缺相检测,转速跟踪计算,V/F曲线计算,转矩补偿计算,自动稳压计算,死区补偿计算,波形发生器周期寄存器值的计算,相位累加值计算,过载过流计算等。
6 实验结果分析
上述交流牵引控制系统在蓄电池矿用电机车上,得以成功实现运行。电机车各个环节的参数为:蓄电池输出电压DC180V,牵引电机额定功率22kW×2,额定电压AC130V,额定电流127 A,电机极数4极。图7(a)为电机车电机空载起动时电流波形,40A/div,电机车在5秒内完成起动,达到稳定运行状态。从图中可以看出,起动电流波形平稳。图7(b)电机车带载运行时,电机电流、电压波形图,电流约为127 A(电流测量探头为20∶1),电压幅值约为180 V。从图中可以看出,电机车运行稳定。

图7 (a)电机起动电流波形

图7 (b)电机车运行电流电压波形
7 结论
设计的基于微芯dsPIC30F6010A单片微机的矿用电机车交流牵引控制系统,硬件电路原理简洁,模块化强,可以灵活地设置参数,适应于不同参数的铅酸蓄电池电机车牵引电机。牵引控制系统的软件设计通用性强,可移植性好。根据牵引电机的技术指标要求,蓄电池组输出电压不同,采用操作键盘,能方便地改变电机额定电压和额定电流,过载和过流参数设置,调频运行,也可以修改波形发生器的载波频率,即实现对牵引电机的调压功能。控制系统可以灵活地将牵引电机所需的V/F控制曲线写入程序,以实现牵引电机输出电压和频率协调控制的功能,根据转差额率控制策略,可实现闭环控制,从而满足矿用电机车牵引特性的要求。
[1]何礼高编著.dsPIC30F电机与电源系列数字信号控制器原理与应用[M],北京:北京航天航空大学出版社,2007
[2]刘和平.dspic通用数字信号控制器原理及应用[M],北京:北京航天航空大学出版社,2007
[3]Zhenyu Yu.Space-vector PWM with TMS320C24x/ F24x Using Hardware and Software Determined Switching Patterns.Texas Instrument Literature Number SPRA524,1999
[4]A.Munoz-Garcia,T.Alipo.A new indution motor v/f control method capable of high-performance regulation at low speeds[J].IEEE Trans. On Industry applications.1998,34(4):813-821
Research of mine lead-acid batteries electrical locomotive traction control system based on DSP
DENG Yonghong,ZHAO Liyong,HUANG Chengyu
(North China Institute of Science and Technology,Information and Control Technology Institute,Yanjiao Beijing-East101601)
This paper is designed based on the Microchip 16-bit single-chip microcomputer dsPIC30F6010A mine locomotive traction control system,providing the traction control system hardware and software implementation scheme and circuit structure. The Traction control system realized speed loop control of the mine electric locomotive to adoption of slip frequency control strategy and the SVPWM method.The experiment indicates that the traction control system meet operation requirements of the mine electrical locomotives AC variable speed,it can be promoted application in the coal mine industry.
mine electric locomotive;Microchip DSPIC30F6010A,single-chip microcomputer;Traction control system;SVPWM;slip frequency control
TD642
A
1672-7169(2012)01-0055-05
2012-01-04
邓永红(1975-),男,湖南涟源人,硕士,华北科技学院信息与控制技术研究所讲师,研究方向:电力电子与电能变换技术,微型计算机控制技术等。
猜你喜欢
电子制作(2017年17期)2017-12-18
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
制造业自动化(2017年2期)2017-03-20
凿岩机械气动工具(2016年1期)2016-11-11
橡胶工业(2015年10期)2015-08-01
新疆钢铁(2015年1期)2015-02-10
自动化博览(2014年6期)2014-02-28
河南科技(2014年23期)2014-02-27
赤峰学院学报·自然科学版(2012年19期)2012-10-14
