
粒子滤波算法在视频目标跟踪中的改进与运用*
2012-12-10 02:23:58侯中喜魏艳艳高显忠
弹箭与制导学报 2012年3期
郭 健,侯中喜,魏艳艳,高显忠
(1国防科学技术大学航天与材料工程学院,长沙 410073;2陆军航空兵学院,北京 100123)
0 引言
对视频图像中目标的跟踪,尤其是对具有移动背景的视频目标跟踪问题,一直是工程技术中一个具有挑战性的课题[1]。
粒子滤波算法以蒙特卡罗模拟方法来实现递推贝叶斯滤波,适用于任何非线性系统和非高斯噪声的情况[2]。但由于该算法计算量大,耗时长,在提出之初,很难用于视频的实时跟踪[3]。近年来,随着计算机硬件水平的提高以及算法的改进,在视频跟踪领域,该算法又重新得到了重视。但在实际应用中仍存在重采样实现过于繁杂,目标跟踪中对亮度变化太过敏感等问题。
针对以上问题,文中对粒子滤波算法做了适当的改进:鉴于粒子滤波过程中,粒子退化现象并非每次迭代都很明显,文中利用等价有效粒子数的概念来判断下一帧的图像是否需要重采样,可大大降低视频目标跟踪中的计算量,且对结果的影响很小。在图像色彩基准中,HSV基准相较RGB基准而言,对图像亮度的变化敏感度较低,因此通过将视频RGB色彩基准转换成HSV色彩基准,然后再根据巴塔恰里亚测度评价模板和匹配区域的可区分程度,将更有利于目标的跟踪。在目标跟踪过程中对目标模板进行实时更新,使算法更适应目标特性发生变化的情况,以实现对目标跟踪的鲁棒性。
1 粒子滤波原理
在给定观测yk的条件下对状态xk进行估计,其最小均方差估计(MMSE)为:

假设系统为非线性动态系统:

其中:xk、yk分别为系统k时刻的状态向量和观测输出,vk、nk分别为系统噪声和观测噪声。
Step2预测:
人际领导力也是校长要具备的一种重要能力。校长只有使不同性格、不同背景的众多个体协调、凝聚、团结成一个强大的整体,才能实现学校发展的共同愿景。人际领导力的外在表现就是校长与教师关系融洽,内在表现则在于校长对教师尊重、信任、关爱。

Step3加权:

Step4权值归一化:


Step6估计:利用式(6)计算滤波值,令k=k+1,返回Step2。
2 视频目标跟踪中对粒子滤波算法的改进
2.1 对重采样策略的改进
重采样方案的提出,主要是为解决粒子退化的问题,即算法经过若干步迭代后,仅有少量粒子有非零的权值,而大量的粒子对应的权值趋近于零。在实际应用中发现:重采样并非在每个时刻的估计中都需要,因为在目标运动不是很剧烈的情况下,粒子退化的现象很弱,重采样对估计量精确度的贡献很小。因此可利用等价有效粒子数的概念来判断下一帧的图像是否需要重采样,具体操作步骤如下:
1)选择合适的量度量当前粒子权值所代表的有效粒子个数。对粒子有效性的度量需满足:当权值集中于少数粒子时度量值小,表示等价有效粒子数少;权值分散于多个粒子时度量值大,表示等价有效粒子数多。由此可将度量值选为:

2)设定重采样门限N_threshold。该值通常取为0.7N,也可在实际测试中经多次调整后选定。
3)由N_eff判断该时刻是否需要进行重采样。对于N_eff>N_threshold的时刻可以跳过重采样这一步骤,从而减小计算量。
2.2 以HSV色彩基准作为目标特征
在目标外观大小改变或部分被遮挡的情况下,颜色特征在目标跟踪具有较强的适应性。通常视频的颜色格式为RGB真彩模式,因此应用中广泛采用的颜色特征提取方法是将R、G、B颜色分量各分为8个等级,用直方图表示成[5],然后计算模板和匹配区域的近似程度。然而在实际应用中这种颜色特征的提取方式存在一个很大的问题就是在图像亮度发生变化的时候,RGB颜色直方图会发生很大的变化,影响模板和目标的匹配性能。但应用HSV色彩基准便可较好的解决这一问题。RGB颜色基准与HSV颜色基准表示方式见图1、图2。

图1 RGB颜色基准

图2 HSV颜色基准
因为HSV色彩基准中V分量独立的代表颜色中的亮度变化,在颜色分级的策略中,可通过减少V的等级来弱化颜色直方图对亮度的敏感程度,具体操作步骤如下:
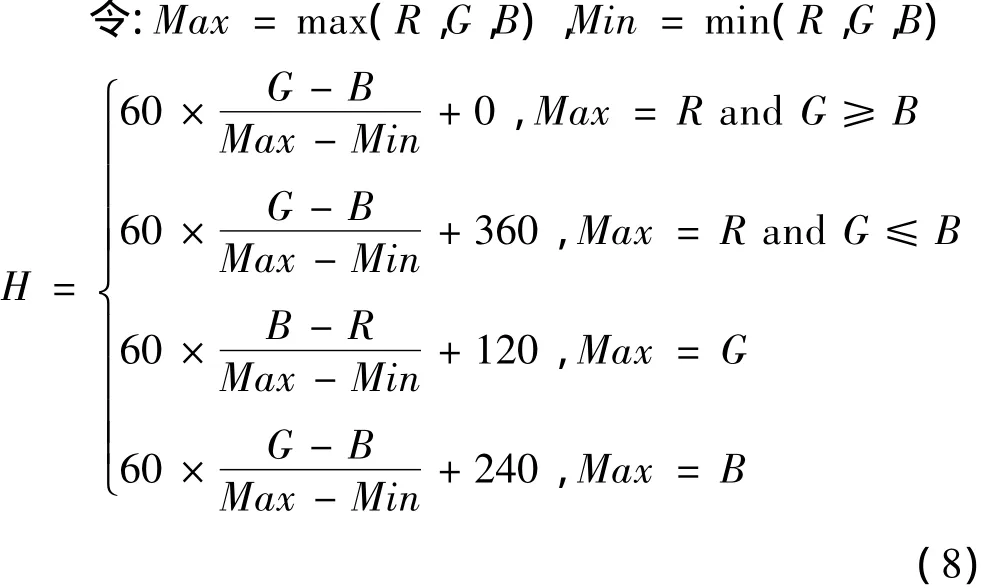
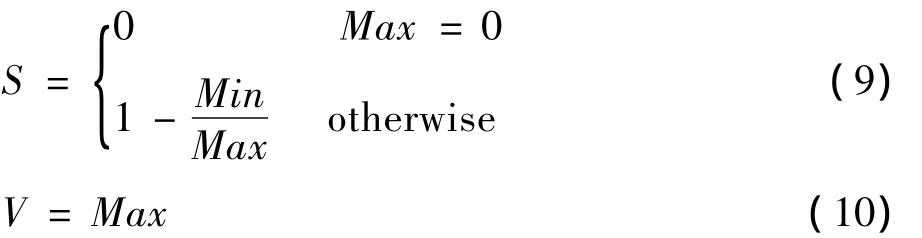
1)将当前帧的RGB色彩基准转化为HSV色彩基准,转化公式如下:
2)将HSV色彩离散成m=8×8×4个区间,把当前粒子搜索空间像素点的色彩离散到对应的区间,形成HSV色彩直方图h(x⇀i)。x⇀i为匹配空间中心点的位置坐标。
3)为增强当粒子搜索区域的边界属于背景,或是目标被遮挡的情况下,粒子滤波性能的鲁棒性,通常取权重函数[6]:

然后对直方图h(x⇀i)进行加权,求得粒子搜索区域的颜色密度分布函数:
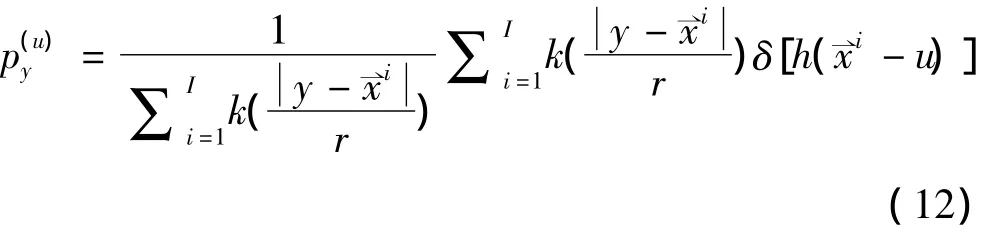
其中I表示粒子搜索区域内像素点的个数。
4)根据巴塔恰里亚测度评价模板和匹配区域的可区分程度。设模板和粒子搜索区域的颜色密度分布函数分别为则巴塔恰里亚系数为:

计算中ρ越大,表示该粒子搜索区域的图像与模板图像的匹配程度越高,ρ=1时表示完全匹配,并以此来对粒子权重进行更新。
3 试验结果与分析
为验证文中改进方案的有效性,可用Matlab编写程序对算法进行试验。文中的试验程序是在CPU为双核1.73G,内存1G的PC机上运行,采用单因子变量法对算法的有效性进行分析与验证。
3.1 重采样策略的有效性验证
重采样改进策略的运用,主要是基于对粒子退化程度的考虑,为此可选取一段目标和背景的变化都比较缓慢的Bottle测试视频进行试验。试验中,粒子数选为200。N_threshold=0.7N,图3为未使用选择重采样策略得到的目标跟踪轨迹,图4为使用选择重采样策略得到的跟踪轨迹。
由图中可以看出,两者跟踪的轨迹相差不大,都很好的跟踪到了目标。对重采样方案做了5次试验,并比较了重采样的次数。试验结果如表1所示。

图3 未使用选择重采样

图4 使用选择重采样
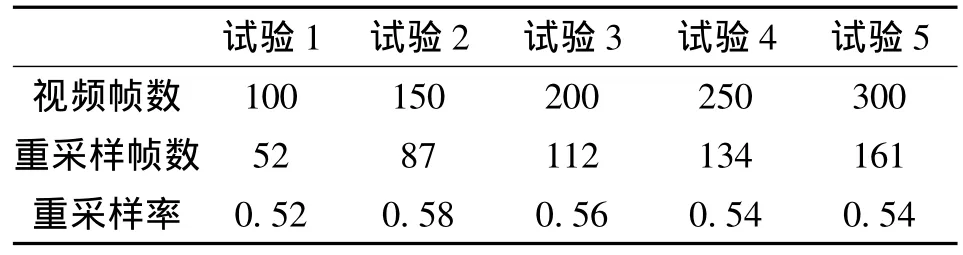
表1 Bottle测试视频跟踪过程中的重采样率
由结果中看出,实施新的重采样策略以后,对重采样的计算量减少了45%左右,大大减少了运算量,有利于算法在嵌入式硬件电路上的实现。
3.2 改变颜色基准的有效性验证
为验证文中所述方案的有效性,可先将两幅背景相同,只有目标亮度发生变化的图像进行分析。图5作为模板,对图6中的目标分别用RGB色彩基准和HSV色彩基准建立颜色密度分布函数,如图所示。

图5 模板的RGB色彩和HSV色彩分布函数
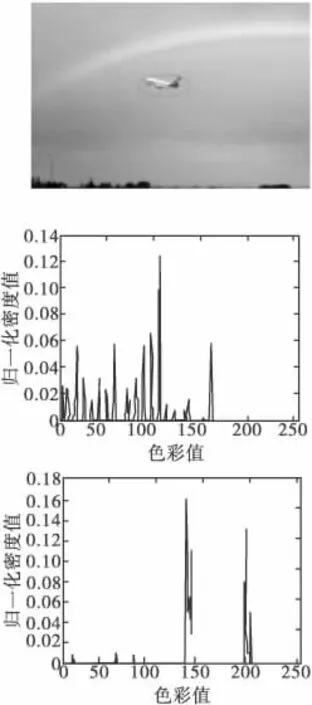
图6 跟踪目标的RGB色彩和HSV色彩分布函数
由图中可以看出,以RGB色彩基准建立的颜色密度分布函数形状变化很大;而以HSV为色彩基准时颜色密度分布函数形状变化并不剧烈,从而更有利于目标和模板的匹配。
以亮度变化比较显著的Flight测试视频进行试验,采用两种方法的视频跟踪图像分别如图7、图8所示。
由图中可以看出,以RGB色彩基准作为目标特征提取,在亮度变化比较大的情况下,丢失了目标,而用HSV色彩基准则很好的解决了这一问题。
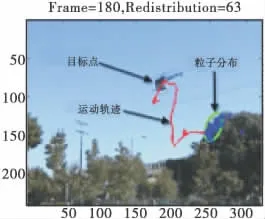
图7 以RGB色彩基准跟踪目标
4 结束语
粒子滤波是近年来在视频目标跟踪领域中受到广泛关注的热点算法,由于其在目标发生变形或是部分被遮挡情况时良好的自适应性能和鲁棒性能,可以预见,该算法将更广泛的应用到专用目标跟踪与检测的嵌入式硬件电路中,这就要求尽量的减小算法的运算量,提高其在特定环境下的性能。在对该算法的应用研究中发现使用选择性重采样策略和HSV色彩基准可减少算法的运算量,提高算法在亮度变化剧烈的环境中的鲁棒性,试验证实这些改进策略是有效的。

图8 以HSV色彩基准跟踪目标
[1]Crisand D A.A survey of convergence results on particle filtering methods for practitioners[J].IEEE Transactions on Signal Processing,2002,50(3):736-740.
[2]姚剑敏,辛琦,郭太良.一种基于粒子滤波的自适应相关跟踪算法[J].武汉理工大学学报,2008,30(1):6-9.
[3]Carpenter J,Clifford P.An improved particle filter for nonlinear problems[J].IEEE Proceedings on Radar and Sonar Navigation,1999,146(1):2-7.
[4]Christophe Andrieu A D.Particle filtering for partially observed Gaussian state space models[J].J.R.Statist,2002,64(4):827-832.
[5]刘洋,李玉山,张大朴,等.基于动态目标建模的粒子滤波视觉跟踪算法[J].光子学报,2008,37(2):375-379.
[6]Erik Cuevas D Z.Particle filter in vision tracking[J].Technical Report,2005,5(13):1-11.
猜你喜欢
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
公民与法治(2016年23期)2016-05-17 04:21:08
公民与法治(2016年19期)2016-05-17 04:18:15
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
读者·校园版(2015年7期)2015-05-14 13:11:40
遥测遥控(2015年2期)2015-04-23 08:15:18
河南科技(2014年15期)2014-02-27 14:12:35
电子设计工程(2014年20期)2014-02-27 12:01:00
